Методы выбора закона регулирования, исходя из свойств объекта.
Выбор того или иного закона управления определяется в первую очередь динамическими свойствами объекта управления, величиной и характером возмущающих воздействий, а также заданными показателями качества регулирования. Следуя этим требованиям в качестве заданного переходного процесса выбирают один из трех типовых переходных процессов.
Переходный процесс в системе управления зависит от свойств химико-технологического объекта, от характера, величины и места приложения возмущающих воздействий и от закона регулирования и параметров настройки регулятора. Чтобы достичь требуемого качества регулирования для выбранного типового переходного процесса, следует принять подходящий закон регулирования и определить параметры настройки.
Предварительным критерием выбора структуры системы регулирования и закона действия регулятора может служить величина отношения времени запаздывания объекта и постоянной времени объекта:  .
.
Для нейтральных объектов вместо То подставляют Та.
При соотношении <0 удовлетворительное качество регулирования можно получить, используя одноконтурную систему регулирования.
В зависимости от величины этого отношения можно предварительно выбрать закон действия регулятора:
При соотношении <0,2 и небольших изменениях нагрузки целесообразно использовать регулятор релейного действия.
При соотношении >0,2 лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения для обеспечения требуемого качества регулирования необходимо выбирать более сложные законы регулирования (П→ПИ→ПИД).
Если  , то при использовании одноконтурной системы регулирования ни один из линейных законов регулирования не дает удовлетворительного качества регулирования. Тогда необходимо использовать многоконтурные системы регулирования.
, то при использовании одноконтурной системы регулирования ни один из линейных законов регулирования не дает удовлетворительного качества регулирования. Тогда необходимо использовать многоконтурные системы регулирования.
При выборе закона регулирования непрерывного действия необходимо принимать во внимание следующее:
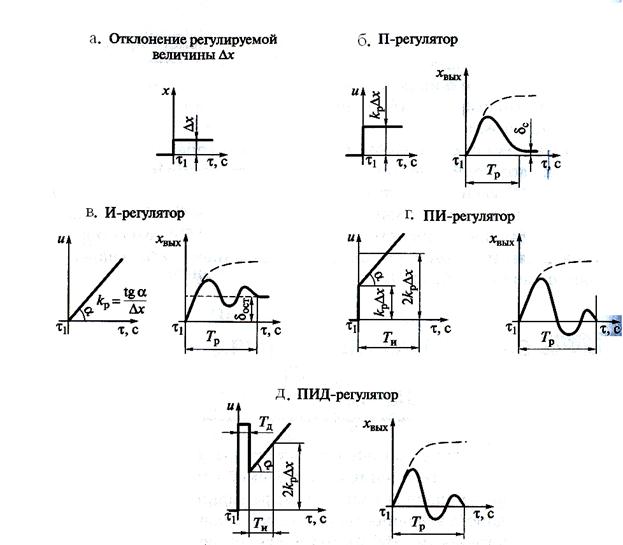
П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка);
И- регуляторы не могу применяться на объектах, не обладающих самовыравниванием. Система, состоящая из объекта управления без самовыравнивания и И-регулятора неустойчива. Поскольку быстродействие И -регулятора невелико, самовыравнивание объекта должно быть значительным, запаздывание небольшим, а изменение нагрузок плавным;
ПИ-регуляторы применяют для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных изменениях нагрузок, когда требуется высокая точность регулирования в статическом режиме (когда остаточные отклонения недопустимы).
ПД- и ПИД- регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих переходным запаздыванием (например теплообменных и массообменных аппаратов), а так же в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
По рисунку 51 можно проанализировать рабочие характеристики различных регуляторов.
Дата добавления: 2020-03-21; просмотров: 1603;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- I. Гидрометаллургические методы
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. Товар и его свойства.
- II этап. Установка свойств объектов
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.
- II.3. Физико-химические свойства нефтей и природных газов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
