Интегральное регулирование
Регуляторы, реализующие данный закон, часто называют астатическими или регуляторами без обратной связи. В динамическом отношении И- закон регулирования подобен интегрирующему звену.
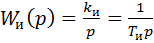
И – регулятор имеет передаточную функцию:
 (27)
(27)
Управляющее воздействие пропорционально интегралу сигнала ошибки:
 (28)
(28)
 =
=  (29)
(29)
Переходная характеристика И -регулятора имеет вид:
 (30)
(30)
где  – коэффициент передачи (усиления) И – регулятора;
– коэффициент передачи (усиления) И – регулятора;
 - постоянная времени интегрирования, которая является настроечным параметром.
- постоянная времени интегрирования, которая является настроечным параметром.
Постоянная времени интегрирования – это время, в течение которого с момента поступления на входе регулятора постоянного воздействия  =const сигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает. Из (рис. 24) следует, что скорость движения регулирующего органа для данного закона пропорциональна величине рассогласования.
=const сигнал на выходе регулятора достигнет значения, равного значению входного сигнала . С увеличением времени интегрирования воздействие входной величины регулятора на выходную ослабевает. Из (рис. 24) следует, что скорость движения регулирующего органа для данного закона пропорциональна величине рассогласования.
На рисунке 24(а) показана переходная функция И-регулятора. Регуляторы, работающие по данному закону, всегда приводят регулируемый параметр к заданному значению, если объект обладает свойством самовыравнивания (рис. 24(б), кривая 1). Применение данного закона регулирования при управлении астатическим объектом, приводит к переходному процессу в виде незатухающих колебаний выходного параметра (кривая 2, рис. 24).
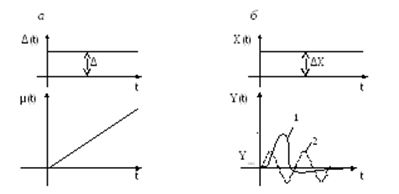
Рисунок 24
Интегральное регулирование — это составная часть процесса регулирования, которая формирует регулирующее воздействие пропорционально интегралу отклонения регулируемой величины так долго, пока существует отклонение. Проще сказать, выходной сигнал регулятора будет воздействовать на регулирующий орган до тех пор, пока смещение не будет устранено и регулируемая переменная не вернется к заданному значению.
Переходные характеристики при двух различных значениях времени интегрирования приведены на рисунке 25, из которого видно, что угол наклона не изменяется во времени. Для нахождения времени интегрирования по переходной характеристике, на поле чертежа наносят единичное ступенчатое изменение величины в том же масштабе. Координата точки пересечения этих характеристик по оси абсцисс определяет величину времени интегрирования.
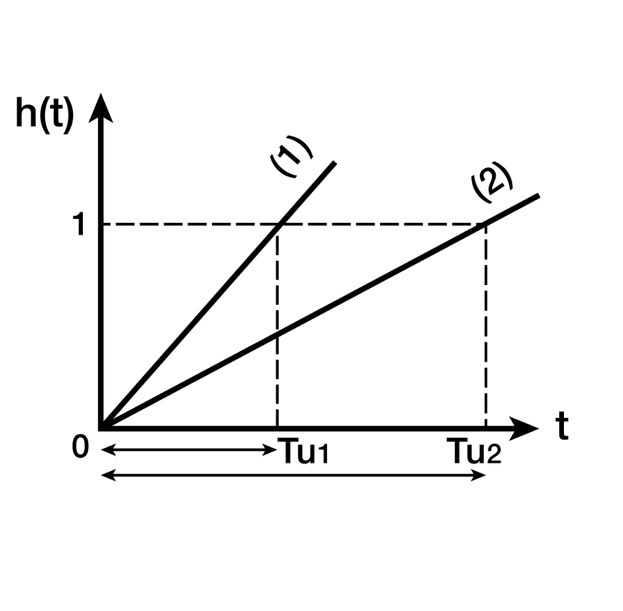
Рисунок 25
Регуляторы с таким законом управления воздействуют на ОУ пропорционально интегралу от отклонения регулируемой величины. Тем самым устраняется статическая ошибка, свойственная П – регуляторам. Вместе с тем, И – регуляторам присуща большая динамическая ошибка и невысокое быстродействие, особенно в начале переходного процесса: в начальный момент входного воздействия И – регулятор вследствие своих инерционных свойств не успевает выработать достаточный управляющий сигнал. С увеличением коэффициента передачи уменьшаются динамическая ошибка, время регулирования, но при этом уменьшается и устойчивость САУ.
И – регуляторы используют в тех случаях, когда условиями эксплуатации допускаются большие динамическая ошибка и время регулирования, и не допускается статическая ошибка. Их устанавливают на объектах с малым запаздыванием и плавным изменением возмущающих воздействий.
С технологической точки зрения И – регулятор формирует воздействие на рабочий орган, которое линейно возрастает или убывает до тех пор, пока регулируемый параметр не вернется к заданному значению. Эти регуляторы просты в реализации, но их нельзя применять на объектах без самовыравнивания, так как процесс регулирования носит колебательный характер, и система может оказаться неустойчивой. Поскольку быстродействие И -регулятора невелико, самовыравнивание объекта должно быть значительным, запаздывание небольшим, а изменение нагрузок плавным.
Как видно из передаточной функции (27), которая аналогична передаточной функции интегрирующего звена, регулятор является астатическим, то есть его статическая ошибка равна нулю, это является основным достоинством регулятора. Его основными недостатками являются низкие быстродействие и устойчивость.
Низкое быстродействие связано с тем, что если в П-регуляторе требуемое значение управляющего воздействия достигается мгновенно, то в И-регуляторе на это затрачивается время, равное Ти = 1/K2 .
Дата добавления: 2020-03-21; просмотров: 1797;
Поиск по сайту
Узнать еще
- АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
- Автоматическое регулирование
- Автоматическое регулирование числа оборотов двигателя
- Административно-правовое регулирование в агропромышленном комплексе
- Административно-правовое регулирование в промышленном комплексе
- Административно-правовое регулирование в строительном комплексе
- Административно-правовое регулирование в хозяйственно-обслуживающем комплексе
- Анализ систем, имеющих автоматическое регулирование.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
