Релейное регулирование
Релейные системы автоматического регулирования относятся к категории систем регулирования прерывистого действия. По своему принципу действия релейные системы вследствие нелинейной характеристики релейных элементов являются нелинейными системами. В релейных системах замыкание и размыкание цепи регулирования происходит в зависимости от значения регулируемой величины. Эти моменты времени заранее не известны и поэтому не могут быть заданы извне.
Релейные системы автоматического регулирования можно разделить на релейные астатические и позиционные. В астатических прерывистых релейных системах контур обратной связи периодически замыкается и размыкается с помощью реле. Позиционные регуляторы обеспечивают перемещение регулирующего органа в одно из фиксированных положений или позиций. По количеству возможных позиций различают двух-, трех-, и многопозиционные . Автоматические регуляторы, у которых при непрерывном изменении входной величины регулирующий орган занимает ограниченное число определенных, заранее известных, положений называются позиционными.Широкое распространение получили двух и трех позиционные регуляторы, у которых выходной сигнал имеет соответственно два и три фиксированных значения. Переход из одного состояния в другое происходит в моменты, когда сигнал рассогласования достигает определенных значений. Статическая характеристика двухпозиционного регулятора показана на рис. 48.
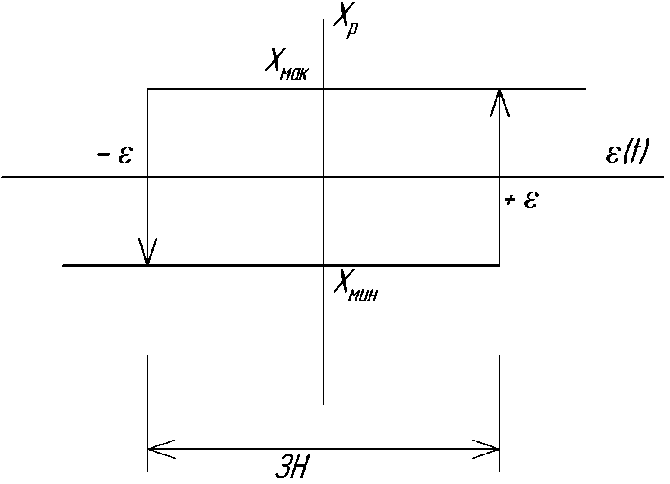
Рисунок 48
Его параметрами настройки является зона неоднозначности (зн) и дискретные значения выходного сигнала регулятора (Хмах, Хмин). Рабочим режимом двухпозиционной САР являются непрерывные колебания регулируемой переменной около заданного значения в пределах, определяемых технологическим регламентом. Поэтому показателями качества работы этих САР являются амплитуда и частота колебаний регулируемой переменной. Зона нечувствительности(рисунок 49) — это величина изменения уровня при его повышении или понижении, которая требуется для стержня с поплавком, чтобы перевести электрический выключатель с положения «ВКЛ» в положение «ВЫКЛ» или наоборот.
Недостатки позиционных САР – наличие автоколебаний, невысокая точность регулирования. Их рекомендуют использовать для объектов, у которых соотношение между временем запаздывания управляющего канала объекта и его постоянной времени не превышает 0,2 (τ/Т ≤ 0,2).
На рис. 5 показаны графики изменения регулируемой величины (1) и выходной величины регулятора, полученные при исследовании двухпозиционной САР методом математического моделирования. Амплитуда колебаний составляет 5 условных единиц, а период колебаний – 30 условных временных единиц.
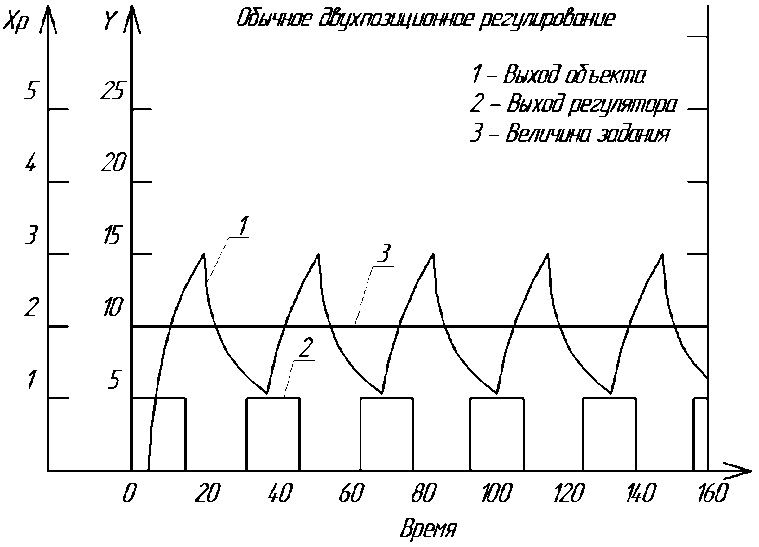
Рисунок 49
Переходный процесс в системе с двухпозиционным регулированием при поддержании постоянной температуры является автоколебательным (рисунок 50). Показателями автоколебательного режима являются амплитуда  и частота
и частота  или период автоколебаний
или период автоколебаний 
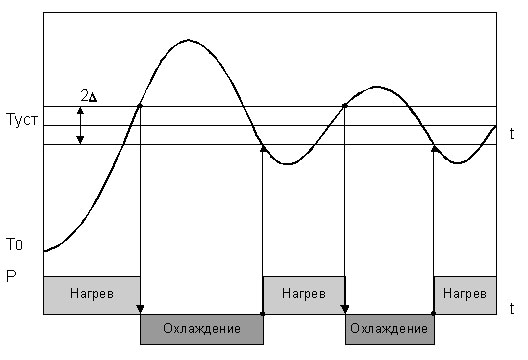
Рисунок 50
Величина определяет точность процесса регулирования параметра: чем она больше, тем ниже точность и наоборот. Частота автоколебаний характеризует интенсивность переключений, срабатываний исполнительного устройства, что в конечном счете, сказывается на показателях надежности системы. Из этих соображений при прочих равных условиях в процессе синтеза системы или при ее настройке величину стараются минимизировать. Кроме того, знание параметров автоколебаний в ряде случаев позволяет определить условия устойчивости системы.
Дата добавления: 2020-03-21; просмотров: 1722;
Поиск по сайту
Узнать еще
- АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
- Автоматическое регулирование
- Автоматическое регулирование числа оборотов двигателя
- Административно-правовое регулирование в агропромышленном комплексе
- Административно-правовое регулирование в промышленном комплексе
- Административно-правовое регулирование в строительном комплексе
- Административно-правовое регулирование в хозяйственно-обслуживающем комплексе
- Анализ систем, имеющих автоматическое регулирование.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
