Пропорционально-интегральное регулирование
ПИ - пропорционально-интегральный регуляторявляется одним из наиболее универсальных регуляторов. Регуляторы, работающие по данному закону, производят перемещение регулирующего органа пропорционально суммарному значению отклонения регулируемой величины и интеграла от отклонения регулируемой величины, т.е. величина перемещения, так и скорость перемещения регулирующего органа зависят от величины отклонения входного сигнала (осуществляют П- и И- воздействие). Другими словами, пропорционально – интегральный регулятор изменяет выходной сигнал пропорционально, как изменению входного сигнала, так и интегралу его изменения.
ПИ –регулятор реализует закон регулирования, который записывается так:
 (31)
(31)
Управляющее воздействие можно записать исходя из того, что оно пропорционально как самому сигналу ошибки, так и его интегралу:
 (32)
(32)
Уравнение динамики ПИ –регулятора имеет вид:
 (33)
(33)
Переходная характеристика ПИ –регулятора описывается зависимостью:
 (34)
(34)
ПИ –регулятор имеет передаточную функцию следующего вида:
 (35)
(35)
где  – коэффициент передачи регулятора, а
– коэффициент передачи регулятора, а  – время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора.
– время интегрирования. Коэффициент передачи и время интегрирования являются параметрами настройки ПИ – регулятора.
На рисунке 27 приведена переходная характеристика ПИ –регулятора.
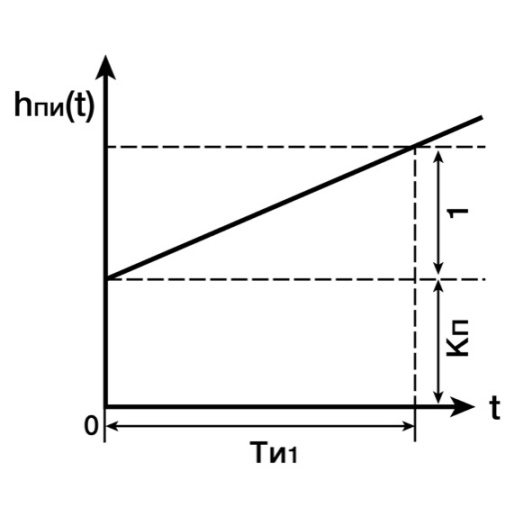
Рисунок 27
Пропорциональная составляющая настраивается с помощью предела пропорциональности  , а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования.
, а интегральная – посредством изменения времени интегрирования. Воздействие входной величины на выходную повышается с уменьшением предела пропорциональности и уменьшением времени интегрирования.
Время изодрома - есть время удвоения пропорциональной составляющей регулирующего воздействие или время, на которое ПИ-регулятор опережает И-регулятор при ступенчатом входном воздействии(рис. 28)
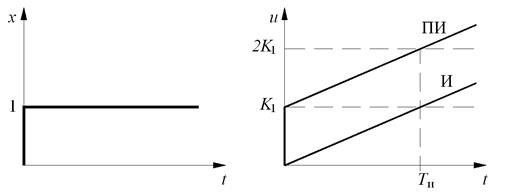
Рисунок 28
Фактически ПИ-регулятор – это П-регулятор с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины.
При отклонении регулируемой величины от заданного значения ПИ-регулятор сразу же изменяет управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения (пропорциональная составляющая), а потом постепенно увеличивает управляющее воздействие за счет интегральной составляющей. То есть он воздействует на ОУ пропорционально отклонению регулируемой величины и интегралу этого отклонения.
Как следует из формулы (35) ПИ –регулятор можно получить, если соединить параллельно два регулятора: пропорциональный, с передаточной функцией  и интегральный, с передаточной функцией
и интегральный, с передаточной функцией  (рисунок 29)
(рисунок 29)
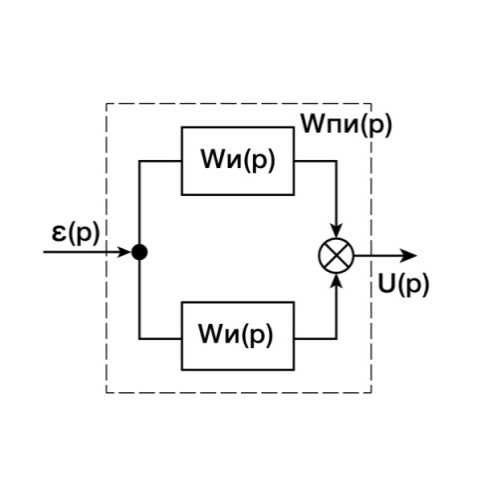
Рисунок 29
ПИ –регулятор обладает преимуществами П – и И –регуляторов, т.е. быстро реагирует на изменение нагрузки (П – составляющая) и работает без статической ошибки (И – составляющая). В случае отказа канала регулирования с интегральной составляющей ПИ –регулятор будет работать как П –регулятор, что повышает надежность его работы. ПИ –регуляторы устанавливают на объекты со значительным запаздыванием при возмущающих воздействиях, изменяющихся с большой частотой в широких пределах.
С технологической точки зрения ПИ –регулирование выглядит так: рабочий орган воспринимает суммарное воздействие, благодаря чему достигается высокое быстродействие, обеспечивается устойчивость регулирования и отсутствует статическая погрешность.
Промышленные ПИ –регуляторы обычно составляются в соответствии со структурными схемами, приведенными на рисунке 30, где в случае 30(а) схема содержит два параллельно соединенных звена: усилительное и интегрирующее (графиком является 1 линия). Передаточная функция такой системы находится из равенства:
 (36)
(36)
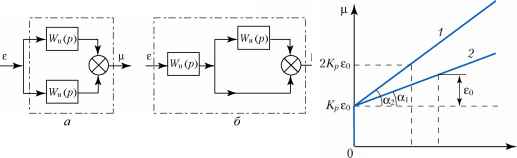
Рисунок 30
Структурная схема, показанная на рисунке 30(б), состоящая из таких же звеньев, но с другим распределением сигнала (линия 2), учитывающим статическую и астатическую погрешность.
Плюсы:прост в реализации и настройке.
Минусы: выход на заданный параметр затянут.
Применяется во многих промышленных устройствах, где надо точно удерживать параметр, который не меняет свое значение мгновенно даже с мгновенным изменением внешней среды. Например температура не может измениться мгновенно, поскольку существует теплоемкость, к тому же сам датчик также не может моментально изменить свою температуру. Давление жидкостей тоже не может мгновенно изменится, поэтому применение ПИ регуляторов для удержания давления вполне оправданно.
Принцип работы пропорционально-интегрального регулирования:поскольку, интегральное регулирование не существует непосредственно само по себе: оно всегда соединяется с пропорциональным регулированием. При пропорциональном регулировании выходной сигнал регулятора изменяется пропорционально изменению входного сигнала. Другими словами, если входной сигнал увеличится на некоторую величину, выходной сигнал регулятора также возрастет на пропорциональное этому изменению величину. Когда изменения на вводе прекращаются, вывод регулятора также перестает изменяться, что часто приводит к появлению неустранимого пропорциональным регулятором смещения регулируемой переменной от уставки. Когда в процесс регулирования к пропорциональной составляющей добавляется интегральная, регулятор продолжает корректировать вывод до полного возврата регулируемой переменной процесса к уставке. Интегральное регулирование, фактически, пропорциональное плюс интегральное регулирование добавляет корректирующее действие к пропорциональному действию.
Плохая устойчивость связана с тем, что интегрирующее звено, аналогично которому работает И-регулятор, вводит в систему отрицательный фазовый сдвиг –90°. Если объект не имеет самовыравнивания, то есть также является интегрирующим звеном, система становится структурно неустойчивой.
Обычно И-регуляторы используют в системах с малоинерционными объектами с самовыравниванием.
3.5 Пропорционально-дифференциальный закон регулирования (ПД-регулятор).
Регулятор, реализующий данный закон регулирования можно представить в виде системы, содержащей два параллельно работающих типовых звена: пропорционального и идеального дифференцирующего. Качество регулирования можно повысить вводя в закон регулирования первую производную (скорость изменения) входной величины регулятора, т.е. Д-составляющую.
Тогда уравнение ПД-закона имеет вид: Уравнение динамики ПД –регулятора:
 (37)
(37)
Передаточная функция:
 (38)
(38)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его производной, то:
 (39)
(39)
где,  – коэффициент передачи регулятора,
– коэффициент передачи регулятора,  – время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
– время дифференцирования (отрезок времени, на который выходная величина опережает его пропорциональную составляющую при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора равен единице).
ПД –регулятор имеет два параметра настройки: предел пропорциональности и время дифференцирования . При наличии Д-составляющей выходная величина регулятора изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения.
Такой регулятор вступает в работу быстрее, чем П –регулятор. Введение в закон регулирования воздействия по производной приводит к усилению влияния регулятора на переходный процесс, при этом сокращается время переходного процесса и уменьшаются колебания регулируемой величины. Переходная характеристика (рисунок 40) отличается от переходной характеристики П –регулятора большим изменением выходной величины сразу после изменения входной.
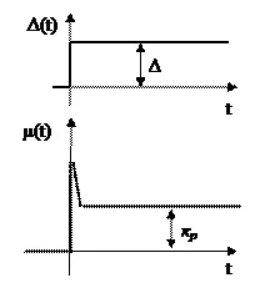
Рисунок 40
Д-составляющая улучшает качество регулирования, уменьшая фазовое запаздывание САУ в целом на +π/2 рад (рисунок 41). Благодаря этому при регулировании достигается эффект упреждения. ПД -регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих переходным запаздыванием (например: теплообменных и массообменных аппаратов), а так же в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
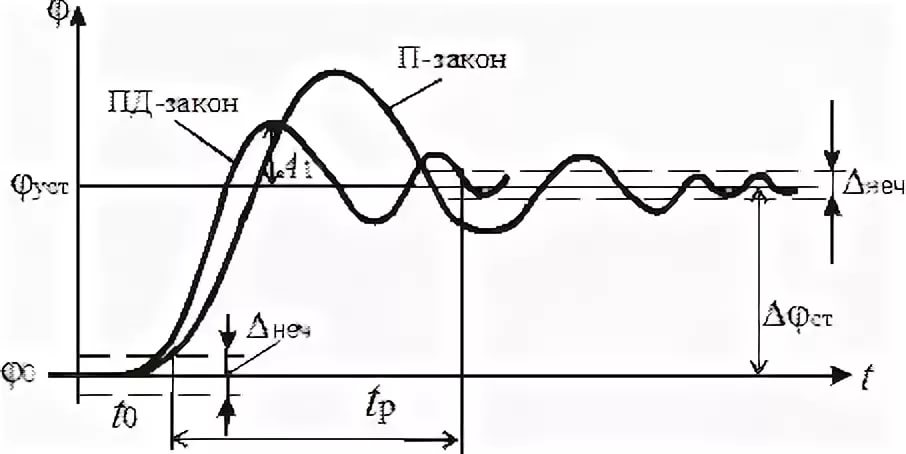
Рисунок 41
Недостатком ПД –регулятора является невозможность обеспечения высокой точности регулирования.
Время предварения - время, на которое ПД-регулятор опережает П-регулятор при линейно изменяющемся входном воздействии (рисунок 42).
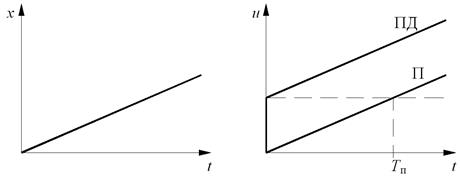
Рисунок 42
Наличие дифференциальной составляющей улучшает работу в динамике, что выражается в повышении быстродействия и устойчивости за счет положительного фазового сдвига. В связи с этим ПД- регуляторы используют в системах с высокоинерционными объектами.
8.6 Пропорционально – интегрально - дифференциальный закон регулирования.
ПИД – пропорционально – интегрально-дифференциальный регулятор
ПИД- регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, данное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно.
Уравнение динамики ПИД –регулятора:
 (40)
(40)
Так как ПИД-закон включает в себя три вида управляющих воздействий, то
 (41)
(41)
Передаточная функция выглядит следующим образом:
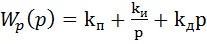 (42)
(42)
Коэффициенты  , входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
, входящие в передаточные функции типовых регуляторов подлежат настройке при наладке САУ и являются настроечными.
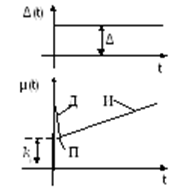
Рисунок43
ПИД –регулятор имеет три параметра настройки: предел пропорциональности, время интегрирования и время дифференцирования. Воздействие входной величины этих регуляторов на выходную повышается с уменьшением предела пропорциональности, уменьшением времени интегрирования и увеличением времени дифференцирования.
На рисунке 44 показан принцип работы ПИД –регулятора.
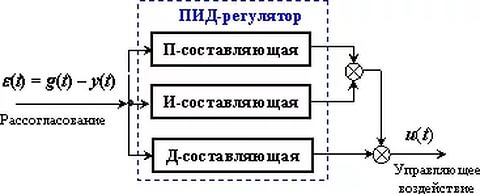
Рисунок 44
В начальный момент времени ПИД регулятор оказывает на ОУ регулирующее воздействие пропорционально скорости изменения, которая затем уменьшается до значения, определяемого П –составляющей. После этого начинает влиять И –составляющая.. Таким образом ПИД –регулятор оказывает на ОУ регулирующее воздействие, которое позволяет ускорить процесс регулирования (рисунок 45).
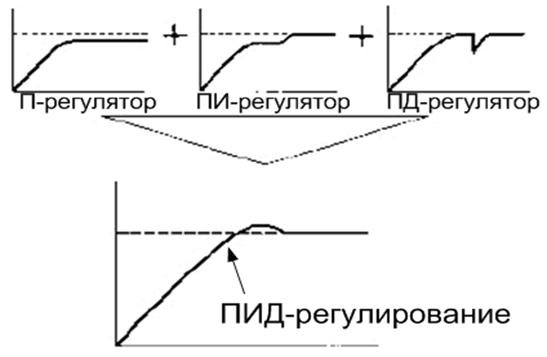
Рисунок 45
ПИД –регулятор обладает еще одним положительным качеством – реакцией на скорость изменения нагрузки, что повышает качество технологического процесса. Такой регулятор устанавливают на объектах со скачкообразной, нечасто изменяющейся нагрузкой.
На рисунке 46 представлена передаточные функции ПИ и ПИД регуляторов.
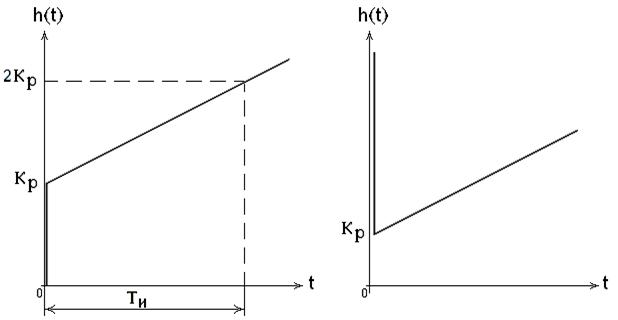
Рисунок 46
ПИД -регуляторы обеспечивают высокое качество регулирования объектов, обладающих переходным запаздыванием (например, теплообменных и массообменных аппаратов).
Плюсы:наилучшая переходная характеристика. Отличная скорость и точность регулирования.
Минусы:сложен в реализации и настройке ,современные ПИД регуляторы реализовываются с применением вычислительных процессоров; выход на заданный параметр затянут.
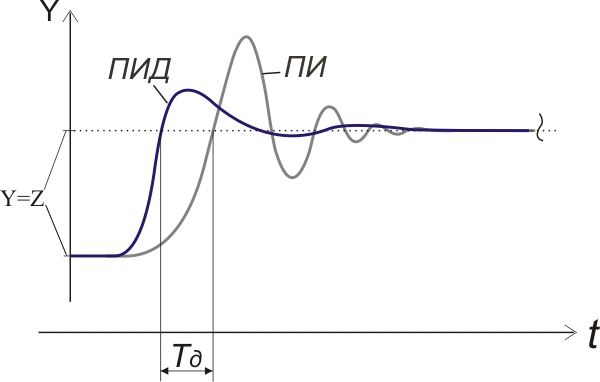
Рисунок 47
Дата добавления: 2020-03-21; просмотров: 4426;
Поиск по сайту
Узнать еще
- АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
- Автоматическое регулирование
- Автоматическое регулирование числа оборотов двигателя
- Административно-правовое регулирование в агропромышленном комплексе
- Административно-правовое регулирование в промышленном комплексе
- Административно-правовое регулирование в строительном комплексе
- Административно-правовое регулирование в хозяйственно-обслуживающем комплексе
- Анализ систем, имеющих автоматическое регулирование.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
