Пропорциональное регулирование
Принцип действия П – регулятора заключается в том, что регулятор вырабатывает управляющее воздействие на объект управления пропорционально величине ошибки.Регуляторы, реализующие данный закон, еще называют регуляторами с жесткой обратной связью или статическими.
Уравнение динамики П – регулятора:
 y (20)
y (20)
где  – коэффициент передачи (пропорциональности) регулятора.
– коэффициент передачи (пропорциональности) регулятора.
У данного регулятора на выходе формируется управляющее воздействие пропорциональное сигналу ошибки:
 (21)
(21)
Откуда:
 (22)
(22)
 - это коэффициент регулирования или настроечный параметр.
- это коэффициент регулирования или настроечный параметр.
График пропорционального регулирования контура температуры приточного воздуха в канальном кондиционере представлен на рисунке 20. Из графика видно (для 1-ого гр.  , что чем больше настроечный параметр, тем меньше время регулирования.
, что чем больше настроечный параметр, тем меньше время регулирования.
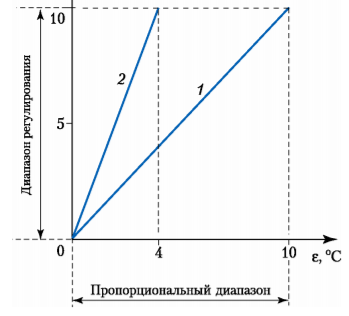
Рисунок 20
Диапазон изменения выходного сигнала называется диапазоном регулирования(рис. 20). Диапазон изменения сигнала ошибки называют пропорциональным диапазоном. В П-регуляторах имеется возможность изменять диапазон регулирования и пропорциональный диапазон.
В операторном виде закон пропорционального регулирования:
 (23)
(23)
Передаточная функция П – регулятора:
 (24)
(24)
В динамическом отношении П – регулятор представляет собой усилительное звено. Переходная характеристика П – регулятора определяется выражением:
 . (25)
. (25)
Вид переходного процесса при пропорциональном регулировании приведен на рисунке 21.
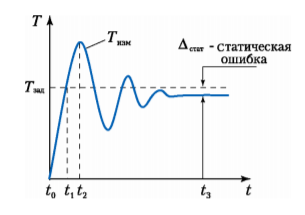
Рисунок 21
Чем большим выбран пропорциональный диапазон регулирования, тем большей будет величина статистической ошибки. При малой величине пропорционального диапазона увеличивается время переходных процессов, и при некоторых условиях может возникнуть автоколебательный (незатухающий) процесс в контуре регулирования. Путем выбора параметров регулирования П-регулятора можно существенно уменьшить установившуюся ошибку регулирования, однако ее полное устранение не представляется возможным даже теоретически
Пропорциональный регулятор не дает выходного управляющего сигнала, если регулируемая переменная процесса не изменяется. Например, когда уровень в резервуаре изменяется, оператор открывает или закрывает клапан пропорционально этим изменениям. Когда изменения уровня прекращаются, оператор останавливает позиционирование клапана. При этом уровень установится на некоторой отметке, но это может не быть заданное значение уровня. Это означает, что при пропорциональном регулировании может быть смещение регулируемой переменной процесса или ошибка регулирования (статическая ошибка).
В определенных системах это вполне приемлемо. Поскольку, почти всем промышленным объектам в той или иной мере присуще запаздывание, особенно переходное, и на известно, что запаздывание ухудшает регулирование в системах с обратной связью, то регулирующее воздействие по пропорциональному закону неспособно эффективно скомпенсировать действие возмущений, следовательно, надо применить другой закон регулирования.
С увеличением  статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства.
статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения следует учитывать эти оба обстоятельства.
Из-за жесткой обратной связи П- регулятор не имеет возможности привести к заданному значению регулируемый параметр при изменении нагрузки на объект. Данное явление получило название остаточной неравномерности регулирования, она оценивается степенью неравномерности (пределом пропорциональности) - диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого:
 (26)
(26)
Который и является параметром настройки П –регулятора. Значение пределов пропорциональности может изменяться и устанавливаться в широких пределах, от двух до нескольких тысяч процентов. На рисунке 22 приведено семейство статических характеристик П –регулятора при разных значениях δ. При δ=100% изменению входной величины «y» регулятора на 1% диапазона ее изменения соответствует изменение выходной величины «x» на 1% диапазона ее изменения.
При крутой статической характеристике (δ<100%) пропорциональная зависимость между величинами x и y наблюдается только внутри границ предела пропорциональности. Значениям параметра за границами предела пропорциональности соответствуют либо максимальное, либо минимальное значения х. При δ=0% П –регулятор работает как двухпозиционный. Если δ>100% полное изменение входного сигнала приводит к частичному изменению величины х. Последняя, не достигает ни одного крайнего значения. При δ=∞ изменение входа y вообще не приводит к изменению выходной величины. Таким образом, степень влияния входной величины П –регулятора на выходную возрастает с уменьшением значения предела пропорциональности.
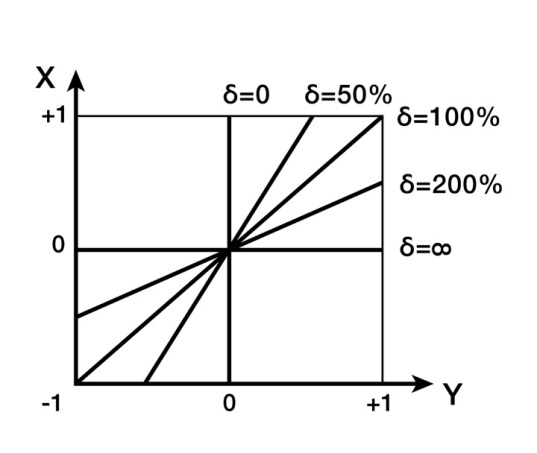
Рисунок 22
Чем больше Кр, тем круче статическая характеристика, тем меньше статическая погрешность (рисунок 23). При Кр=0 (линия 0) отклонение текущего значения параметра от заданного значения не вызывает никакого перемещения затвора регулирующего органа. Это равносильно отсутствию регулятора, и возмущение компенсировано быть не может. При Кр=∞ (линия 3) П-регулятор не давал бы статической погрешности (ε∞=0). Практически такой регулятор реализовать нельзя. Коэффициент усиления регулятора не должен превышать некоторого максимального допустимого значения. Пропорциональный регулятор воздействует на рабочий орган тем сильнее, чем больше отклонение регулируемого параметра от заданного значения.
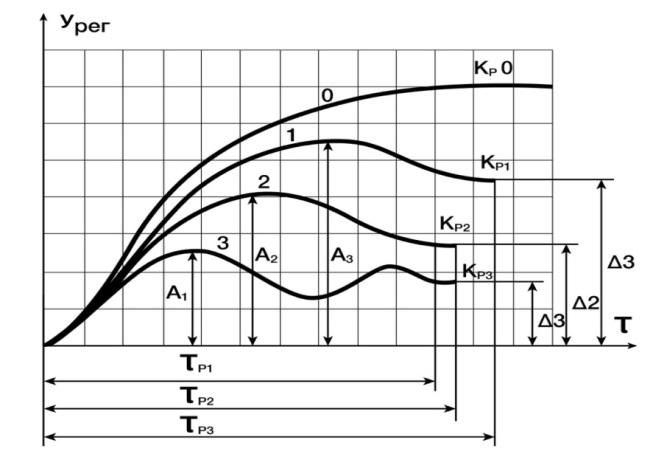
Рисунок 23
Отсюда следует, что избавиться от недостатка, присущего пропорциональному закону – статической погрешности – принципиально невозможно. Можно уменьшить статическую ошибку регулирования, увеличивая Кр. Однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения Кр следует учитывать оба обстоятельства.
Если на вход П -регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний.
П -регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка).
ДостоинствоП – регуляторов – простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью.
Недостаток – установившаяся статистическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
Дата добавления: 2020-03-21; просмотров: 2753;
Поиск по сайту
Узнать еще
- АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
- Автоматическое регулирование
- Автоматическое регулирование числа оборотов двигателя
- Административно-правовое регулирование в агропромышленном комплексе
- Административно-правовое регулирование в промышленном комплексе
- Административно-правовое регулирование в строительном комплексе
- Административно-правовое регулирование в хозяйственно-обслуживающем комплексе
- Анализ систем, имеющих автоматическое регулирование.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
