Принятие решения на основе определенных правил
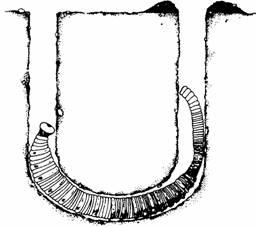
Когда говорят, что животное принимает решения, то отнюдь не подразумевают наличие сознательного намерения, а просто констатируют, что животное предпочитает один из альтернативных вариантов поведения другим. Такое решение можно рассматривать как случайное или как результат некоего стохастического процесса (Dawkins, Dawkins, 1974). Однако животное, которое живет в относительно стабильной и неизменной среде, может принимать решения на основе простых правил. Создается впечатление, что поведение некоторых видов животных в основном заранее запрограммировано, а принятие решения осуществляется у них стандартным путем. Например, пескожил (Arenicola) живет в U-образных норах в литоральной зоне илистых морских берегов и песчаных отмелей (рис. 25.1.). Этот червь получает пищу из песка, засасывая его в кишку и выбрасывая через анальное отверстие. Такое пищевое поведение проявляется как бы в виде «вспышек», которые возникают регулярно примерно каждые семь минут и разделяются периодами покоя. Снабжение норки кислородом осуществляется с помощью специального ирригационного поведения, которое повторяется через каждые четыре минуты, даже во время отлива (хотя и менее энергично), когда нет воды, насыщенной кислородом. Поведение пескожила подчинено этим ритмам, которые стабильно проявляются при самых различных условиях. Однако после длительного периода кислородной депривации животное может этот ритм изменить и осуществлять ирригационное поведение в течение более длительного времени, чем обычно (Wells, 1966). Таким образом, создается впечатление, что поведение пескожила запускается с помощью своего рода часового механизма, который изменяет работу только при чрезвычайных обстоятельствах. Такая стратегия поведения, в которой решения запрограммированы, может быть подходящей для животного, обитающего в стабильной и предсказуемой среде, однако в условиях меняющегося окружения требу-
|
| Рис. 25.1. Пескожил (Arenicola marina). |
ется более гибкое управление поведением.
Если поведение животного отклоняется от строгого шаблона, перед животным немедленно встает проблема выбора из нескольких поведенческих альтернатив. Это связано либо с тем, что оно не может одновременно совершать несовместимые действия, либо с тем, что в каждый момент времени оно может обращать внимание только на один комплекс стимулов (см. разд. 12.5). Так или иначе, но животное должно осуществить только одну деятельность в ситуации, где в принципе могло бы одновременно осуществляться много различных деятельностей. Одна из возможностей достичь этого - воспользоваться правилом строгой иерархии активностей - подобно тому, что обнаружено в поведении хищного брюхоногого моллюска Pleurobranchus. У этого моллюска различные виды активностей ранжированы по степени их важности, а именно: откладка яиц, питание, спаривание, другие виды активности (Davis et al., 1974). Так, например, если предложить животному пищу, то оно откажется от своего полового партнера даже во время копуляции. Однако во время откладывания яиц происходит гормональное подавление пищевого поведения, благодаря чему исключается возможность поедания моллюском собственных яиц.
Более обычный способ, позволяющий животному остановиться на выполнении какой-то одной деятельности, состоит в том, чтобы тем или иным способом оце-
нить относительную силу возможных видов деятельности, которые могли бы осуществиться в данное время. Как мы уже видели в гл. 15, сила стремления животного к выполнению определенной деятельности зависит как от внутренних, так и от внешних факторов. Например, стремление животного найти себе пищу определяется степенью голода и внешними сигналами, которые указывают на наличие пищи. Животному достаточно было бы руководствоваться простым правилом, которое предписывало бы ему, что нужно искать пищу, если стремление есть сильнее любого другого стремления. В течение долгого времени полагали, что именно такого рода правило и составляет суть механизма принятия решения у животных. Считалось, что конкуренция побуждений (drives) осуществляется таким образом, что наиболее сильное побуждение проявляется в поведении животного, а другие побуждения будут тормозиться или их влияние на поведение животного будет блокироваться. Эта теория кажется достаточно простой, но с ней связан ряд трудностей. Не говоря уже о проблемах, касающихся концепции побуждения (см. гл. 15), существуют трудности, связанные с возможностью формирования в эволюции такого животного, поведение которого было бы основано на простой конкуренции мотивационных систем.
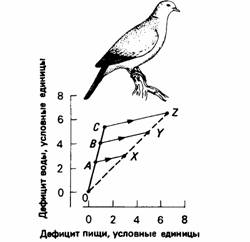
Естественно ожидать, что выбор, который делает животное, будет зависеть от его мотивационного состояния. Некоторые данные поддерживают эту точку зрения. Например, можно подвергнуть горлиц пищевой и водной депривации таким образом, что будет возможность точно рассчитать уровень их голода и жажды. Эти горлицы всегда будут осуществлять выбор между пищей и водой в Y-образном лабиринте (или в камере Скиннера) в соответствии с уровнем голода и жажды (рис. 25.2). Однако горлицы, по-видимому, при выборе пищи или воды не руководствуются простым правилом «ешь, если есть хочется сильнее, чем пить, и пей, если пить хочется сильнее, чем есть», что видно по результатам опытов, представленным на рис. 25.3. Это был один из первых экспериментов, вызвавший сомнения по поводу того, что основу механизма принятия решения со-
|
| Рис. 25.2. Мотивационное состояние горлиц, которых сначала подвергали водной депривации, а затем спустя заданное время (т.е. в точках А, В или С) и пищевой депривации - также на заданный период времени. В состояниях Х, У и Z горлицы проявляют одинаковое стремление к пище и к воде. (По McFarland, 1971.) |
ставляет простая конкуренция мотиваций. Однако перед тем, как отвергнуть теорию конкуренции мотиваций, следует рассмотреть ее более подробно.
Дата добавления: 2016-06-18; просмотров: 2161;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
