Анализ структуры мехатронной системы
Анализ структуры мехатронных систем мехатронных модулей
Мехатроника изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, систем, машин и комплекса машин с интеллектуальным управлениями их функциональными движениями.[1]
Мехатронная система – совокупность мехатронных модулей (компьютерного ядра, информационных устройств-датчиков, электромеханических (приводов двигателей), механичемских (исполнительные элементы – фрезы, руки робота и т.д.), программного обеспечения (специально – управляющие программы, системного – операционные системы и среды, драйверы).
Мехатронный модуль – отдельный блок мехатронной системы, совокупность аппаратно-программных средств, осуществляющих движение одного или нескольких исполнительных органов.
Интегрированные мехатронные элементы выбираются разработчиком на стадии проектирования, а затем обеспечивается необходимая инженерная и технологическая поддержка.
Методологическая основа разработки МС служат методы параллельного проектирования, то есть одновременного и взаимосвязанного при синтезе всех компонентов системы. Базовыми объектами являются мехатронные модули, которые выполняют движение, как правило, по одной координате. В мехатронных системах для обеспечения высокого качества реализации сложных и точных движений применяются методы интеллектуального управления (новые идеи в теории управления, современные аппараты вычислительной техники).
В состав традиционной мехатронной машины входят следующие основные компоненты:
- механические устройства, конечным звеном которого является рабочий орган;
- блок приводов, включающий силовые преобразователи и силовые двигатели;
- устройства компьютерного управления, уровнем для которого является человек-оператор, либо другая ЭВМ входящая в компьютерную сеть;
- сенсорные устройства, предназначенные для передачи устройству управления информации о фактическом состоянии блоков машины и движения мехатронной системы.
Таким образом, наличие трех обязательных частей: электромеханической, электронной, компьютерной, связанных энергетическими и информационными потоками является первичным признаком отличающим мехатронную систему.
Таким образом, для физической реализации мехатронной системы теоретически необходимы 4 основных функциональных блока, которые изображены на рисунке 1.1
Рисунок 1.1 – Блок-схема мехатронной системы
Если работа основана на гидравлических, пневматических или комбинированных процессах, то необходимы соответствующие преобразователи и датчики обратной связи.
Мехатроника является научно-технической дисциплиной, которая изучает построение электромеханических систем нового поколения, обладающих принципиально новыми качествами и, часто, рекордными параметрами. Обычно мехатронная система является объединением собственно электромеханических компонентов с новейшей силовой электроникой, которые управляются с помощью различных микроконтроллеров, ПК или других вычислительных устройств. При этом система в истинно мехатронном подходе, несмотря на использование стандартных компонентов, строится как можно более монолитно, конструкторы стараются объединить все части системы воедино без использования лишних интерфейсов между модулями. В частности, применяя встроенные непосредственно в микроконтроллеры АЦП, интеллектуальные силовые преобразователи и т. п. Это даёт сокращение массогабаритных показателей, повышение надёжности системы и другие преимущества. Любая система, управляющая группой приводов может считаться мехатронной. В частности, если она управляет группой реактивных двигателей космического аппарата.
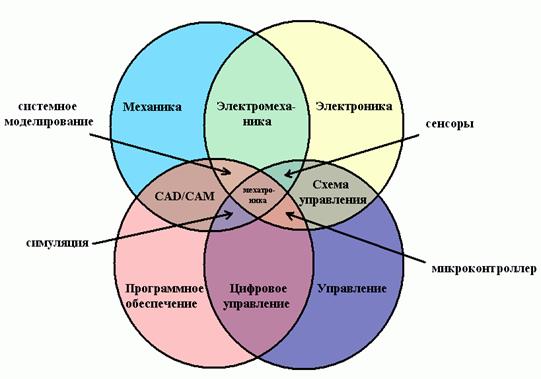
Рисунок 1.2 – Состав мехатронной системы
Иногда система содержит принципиально новые с конструкторской точки зрения узлы, такие как электромагнитные подвесы, заменяющие обычные подшипниковые узлы.
Рассмотрим обобщенную структуру машин с компьютерным управлением, ориентированных на задачи автоматизированного машиностроения.
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Внешние среды укрупненно можно разделить на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой для проектирования МС степенью точности. Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред как правило могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для оценки сил резания при механообработке проводят серии экспериментов на специальных исследовательских установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и компьютерных моделей возмущающих воздействий на основе экспериментальных данных.
Однако для организации и проведения подобных исследований зачастую требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган при операции роботизированного удаления облоя с литых изделий необходимо измерять фактические форму и размеры каждой заготовки.
Рисунок 1.3 – Обобщенная схема мехатронной системы с компьютерным управлением движением
В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения МС непосредственно в ходе выполнения операции.
В состав традиционной машины входят следующие основные компоненты: механическое устройство, конечным звеном которого является рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении МС.
Таким образом, наличие трех обязательных частей - механической (точнее электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком, отличающим мехатронные системы.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления (УКУ). В состав УКУ мехатронной системы обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции:
- управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации;
- организация управления функциональными движениями МС, которая предполагает координацию управления механическим движением МС и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства;
- взаимодействие с человеком-оператором через человеко-машинный интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения МС (режим on-line);
- организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи. Характерно, что электрическая энергия (реже гидравлическая или пневматическая) используется в современных системах как промежуточная энергетическая форма.
Суть мехатронного подхода к проектированию состоит в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы. Другими словами, на стадии проектирования из традиционной структуры машины исключается как сепаратное устройство по крайней мере один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем.
В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять с желаемыми показателями качества заданное функциональное движение. Аппаратное объединение элементов в единые конструктивные модули должно обязательно сопровождаться разработкой интегрированного программного обеспечения. Программные средства МС должны обеспечивать непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени.
Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
- относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации всех элементов и интерфейсов;
- высокое качество реализации сложных и точных движений вследствие применения методов интеллектуального управления;
- высокую надежность, долговечность и помехозащищенность;
- конструктивную компактность модулей (вплоть до миниатюризации в микромашинах),
- улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
- возможность комплексирования функциональных модулей в сложные системы и комплексы под конкретные задачи заказчика.
Дата добавления: 2020-02-05; просмотров: 1176;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Ситуационный анализ внутренней деятельности.
- I. Создание системы управленческого учета.
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III этап – Анализ выступления.
- III. Механизм действия ионизирующих излучений на биологические структуры

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
