ФИЛЬТРАЦИЯ ОДНОМЕРНЫХ СИГНАЛОВ.
Предмет цифровой фильтрации данных (сигналов) является естественным введением в широкую и фундаментальную область цифровой обработки информации. Под фильтрацией будем понимать любое преобразование информации (сигналов, результатов наблюдений), при котором во входной последовательности обрабатываемых данных целенаправленно изменяются определенные соотношения (динамические или частотные) между различными компонентами этих данных.
К основным операциям фильтрации информации относят операции сглаживания, прогнозирования, дифференцирования, интегрирования и разделения сигналов, а также выделение информационных (полезных) сигналов и подавление шумов (помех).
Как известно, преобразование динамики сигналов (и данных, которые несут эти сигналы) осуществляется в системах. Соответственно, фильтры с любым целевым назначением являются частным случаем систем преобразования сигналов, в рамках теории которых они и будут рассматриваться.
В настоящем курсе рассматриваются, в основном, методы линейной обработки данных (носителей этих данных - сигналов) линейными дискретными системами. Линейными называют системы, которые осуществляют преобразование линейных комбинаций входных сигналов в суперпозицию выходных сигналов. Принцип реализации линейных систем, физический - в виде специальных микропроцессорных устройств, или алгоритмический - в виде программ на ЭВМ, существенного значения не имеет и определяет только их потенциальные возможности.
1.2. Цифровые фильтры /л2,л24/.
Общие понятия. В одномерной дискретной линейной системе связь между входом и выходом (входной и выходной дискретными последовательностями значений сигнала – отсчетами), задается линейным оператором преобразования TL:
y(kDt) = TL{x(kDt)}.
Это выражение отображает краткую запись линейного разностного уравнения:
 am y(kDt-mDt) =
am y(kDt-mDt) =  bn x(kDt-nDt), (1.2.1)
bn x(kDt-nDt), (1.2.1)
где k = 0,1,2,..- порядковый номер отсчетов, Dt - интервал дискретизации сигнала, am и bn - вещественные или, в общем случае, комплексные коэффициенты. Положим a0 = 1, что всегда может быть выполнено соответствующей нормировкой уравнения (1.2.1), и, принимая в дальнейшем Dt = 1, приведем его к виду:
y(k) = bn x(k-n) –  am y(k-m). (1.2.2)
am y(k-m). (1.2.2)
Оператор, представленный правой частью данного уравнения, получил название цифрового фильтра (ЦФ), а выполняемая им операция - цифровой фильтрации данных (информации, сигналов). Если хотя бы один из коэффициентов am или bn зависит от переменной k, то фильтр называется параметрическим, т.е. с переменными параметрами. Ниже мы будем рассматривать фильтры с постоянными коэффициентами (инвариантными по аргументу).
Нерекурсивные фильтры. При нулевых значениях коэффициентов am уравнение (1.2.2) переходит в уравнение линейной дискретной свертки функции x(k) с оператором bn:
y(k) = bn x(k-n). (1.2.3)
Значения выходных отсчетов свертки (1.2.3) для любого аргумента k определяются текущим и "прошлыми" значениями входных отсчетов. Такой фильтр называется нерекурсивным цифровым фильтром (НЦФ). Интервал суммирования по n получил название "окна" фильтра. Окно фильтра составляет N+1 отсчет, фильтр является односторонним каузальным, т.е. причинно обусловленным текущими и "прошлыми" значениями входного сигнала, и выходной сигнал не опережает входного. Каузальный фильтр может быть реализован физически в реальном масштабе времени. При k<n, а также при k<m для фильтра (1.2.2), проведение фильтрации возможно только при задании начальных условий для точек x(-k), k = 1,2,..,N, и y(-k), k = 1,2,..,M. Как правило, в качестве начальных условий принимаются нулевые значения или значения отсчета х(0), т.е. продление отсчета x(0) назад по аргументу.
При обработке данных на ЭВМ ограничение по каузальности снимается. В программном распоряжении фильтра могут находиться как "прошлые", так и "будущие" значения входной последовательности отсчетов относительно текущей точки вычислений k, при этом уравнение (1.2.3) будет иметь вид:
y(k) =  bn x(k-n). (1.2.4)
bn x(k-n). (1.2.4)
При N' = N фильтр называется двусторонним симметричным. Симметричные фильтры, в отличие от односторонних фильтров, не изменяют фазы обрабатываемого сигнала.
Техника выполнения фильтрации не отличается от техники выполнения обычной дискретной свертки двух массивов данных.
 Рис. 1.2.1. Нерекурсивный ЦФ.
Рис. 1.2.1. Нерекурсивный ЦФ.
|
Представим, что на одной полоске бумаги выписаны по порядку сверху вниз значения данных x(k) ≡ sk (см. рис. 1.2.1). На второй полоске бумаги находятся записанные в обратном порядке значения коэффициентов фильтра bn ≡ hn (обозначение h для коэффициентов операторов НЦФ является общепринятым). Для вычисления yk ≡ y(k) располагаем вторую полоску против первой таким образом, чтобы значение h0 совпало со значением sk, перемножаем все значения hn с расположенными против них значениями sk-n и суммируем все результаты перемножения. Результат суммирования является выходным значением сигнала yk. Сдвигаем окно фильтра - полоску коэффициентов hk, на один отсчет последовательности sk вниз (или массив sk сдвигаем на отсчет вверх) и вычисляем аналогично следующее значение выходного сигнала, и т.д.
Описанный процесс является основной операцией цифровой фильтрации и называется сверткой в вещественной области массива данных x(k) с функцией (оператором) фильтра bn (массивом коэффициентов фильтра). Для математического описания наряду с формулами (1.2.3-1.2.4) применяется также символическая запись фильтрации:
y(k) = b(n) * x(k-n).
Сумма коэффициентов фильтра определяет коэффициент передачи (усиления) средних значений сигнала в окне фильтра и постоянной составляющей в целом по массиву данных (с учетом начальных и конечных условий). Как правило, сумма коэффициентов фильтра нормируется к 1.
Имеется целый ряд методов обработки данных, достаточно давно и широко известных, которые по существу относятся к методам цифровой фильтрации, хотя и не называются таковыми. Например, методы сглаживания отсчетов в скользящем окне постоянной длительности. Так, для линейного сглаживания данных по пяти точкам с одинаковыми весовыми коэффициентами используется формула:
yk = 0.2(xk-2+xk-1+xk+xk+1+xk+2).
С позиций цифровой фильтрации это не что иное, как двусторонний симметричный нерекурсивный цифровой фильтр:
yk =  bn xk-n, bn = 0,2. (1.2.5)
bn xk-n, bn = 0,2. (1.2.5)
Аналогично, при сглаживании данных методом наименьших квадратов (МНК) на основе кубического уравнения:
yk = (-3xk-2+12xk-1+17xk+12xk+1-3xk+2)/35. (1.2.6)
Это также НЦФ с коэффициентами: b0 = 17/35, b1 = b-1 = 12/35, b2 = b-2 = -3/35.
Пример.Уравнение НЦФ: yk = bn xk-n, bn = 0,2. Начальные условия - нулевые.
Входной сигнал – скачок функции (ступень): xk = {0,0,0,0,0,0,10,10,10,10,…}.
Выходной сигнал: yk = {0,0,0,0,2,4, 6, 8,10,10,10,10,…}.
Результат фильтрации приведен на рис. 1.2.2(А). Проверьте результат (выполните фильтрацию, как это показано на рис. 1.2.1, с учетом четности фильтра).
Заметим: сумма коэффициентов сглаживающих НЦФ всегда должна быть равна 1, при этом сумма значений массива выходного сигнала равна сумме значений массива входного сигнала. Координатная детальность выходного сигнала ниже входного, резкие изменения входных сигналов "размазываются" по аргументу.
Повторите фильтрацию фильтром МНК на основе кубического уравнения. Сравните результаты фильтрации с результатами первого НЦФ (приведены на рис. 1.2.2(В)).
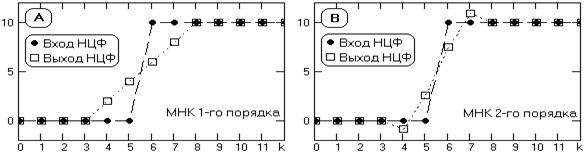
Рис. 1.2.2. Сглаживание МНК в скользящем окне по пяти точкам
Для операции фильтрации характерны следующие основные свойства:
1. Дистрибутивность: h(t) * [a(t)+b(t)] = h(t) * a(t)+h(t) * b(t).
2. Коммутативность: h(t) * a(t) * b(t) = a(t) * b(t) * h(t).
3. Ассоциативность: [a(t) * b(t)] * h(t) = h(t) * a(t) * b(t).
Фильтрация однозначно определяет выходной сигнал y(t) для установленного значения входного сигнала s(t) при известном значении импульсного отклика фильтра h(t).
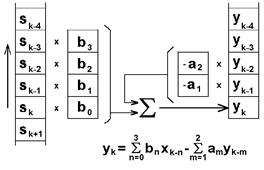 Рис. 1.2.3. Рекурсивный ЦФ.
Рис. 1.2.3. Рекурсивный ЦФ.
|
Рекурсивные фильтры. Фильтры, которые описываются полным разностным уравнением (1.2.2), принято называть рекурсивными цифровыми фильтрами (РЦФ), так как в вычислении текущих выходных значений участвуют не только входные данные, но и значения выходных данных фильтрации, вычисленные в предшествующих циклах расчетов. С учетом последнего фактора рекурсивные фильтры называют также фильтрами с обратной связью, положительной или отрицательной в зависимости от знака суммы коэффициентов am. По существу, полное окно рекурсивного фильтра состоит из двух составляющих: нерекурсивной части bn, ограниченной в работе текущими и "прошлыми" значениями входного сигнала (при реализации на ЭВМ возможно использование и “будущих” отсчетов сигнала) и рекурсивной части am, которая работает только с "прошлыми" значениями выходного сигнала. Техника вычислений для РЦФ приведена на рис. 1.2.3.
Пример.Уравнение РЦФ: yk = boxk+a1yk-1, при bo = a1 = 0.5, y-1 = 0.
Входной сигнал: xk = {0,0,1,0,0,0,0,0,0,0,1,1,1,1,1....}
Расчет выходного сигнала:
уo = 0,5xo + 0,5y-1 = 0; y1 = 0,5x1 + 0,5yo =0; y2 = 0,5x2 + 0,5y1 = 0.5; y3 = 0,5x3 + 0,5y2 = 0.25;
y4 = 0,5x4 + 0,5y3 = 0.125; y5 = 0,5x5 + 0,5y4 = 0.0625; y6 = 0,5x6 + 0,5y5 = 0.03125; и т.д.
Выходной сигнал: yk = {0, 0, 0.5, 0.25, 0.125, 0.0625, 0.03125, 0.015625,...}
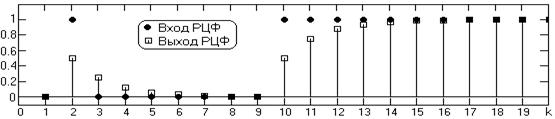
Рис. 1.2.4. Рекурсивная фильтрация.
Из примера можно видеть, что реакция РЦФ на конечный входной сигнал, в принципе, может иметь бесконечную длительность (в данном случае с близкими к нулю, но не нулевыми значениями), в отличие от реакции НЦФ, которая всегда ограничена количеством членов bk (окном фильтра).
Пример.Уравнение РЦФ: yk = boxk - a1yk-1, при bo = 0.5, a1=1.1, y-1 = 0
Входной сигнал: xk = {0, 10, 0, 0, 0,....}.
Выходной сигнал: yk = {0,0,5,-5.5,6.05,-6.655,7.321,-8.053,8.858,-9.744,10.718,-11.79,… и т.д.}
Заметим: коэффициент обратной связи больше 1 и выходной сигнал идет "в разнос".
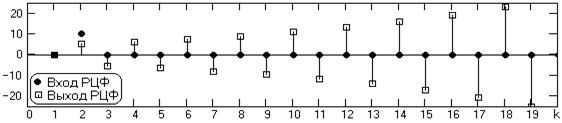
Рис. 1.2.5. Неустойчивый рекурсивный фильтр.
Операции, относящиеся к рекурсивной фильтрации, также известны в обычной практике, например - интегрирование. При интегрировании по формуле трапеций:
yk = (xk+xk-1)/2 + yk-1, (1.2.7)
т.е. здесь мы имеем РЦФ с коэффициентами: bo = b1 = 0.5, a1 = 1.
Пример.Уравнение РЦФ: yk=(xk+xk-1)/2+yk-1, начальные условия - нулевые.
Входной сигнал: xk={0,0,2,2,4,0,0,0,4,4,4,0,0,0,5,0,0,0,....}
Выполните фильтрацию. Контроль: yk= {0,0,0,1,3,6,8,8,8,10,14,18,20,20,20,22.5,25,25,25...}
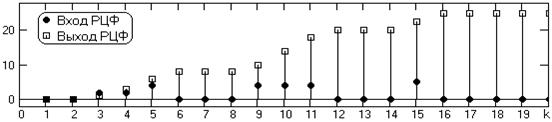
1.2.6. Интегрирующий рекурсивный фильтр.
1.3. Импульсная реакция фильтров.
Функция отклика. Если на вход фильтра подать единичный импульс (импульс Кронекера), расположенный в точке k = 0, то на выходе фильтра мы получим его реакцию на единичный входной сигнал, которая однозначно определяется оператором преобразования:
y(k) = TL[d(0)] = bn * d(0-n) = h(k) ≡ bn. (1.3.1)
Функция h(k), которая связывает вход и выход фильтра по реакции на единичный входной сигнал, получила название импульсного отклика фильтра (функции отклика).
Если произвольный сигнал на входе фильтра представить в виде линейной комбинации взвешенных импульсов Кронекера
x(k) =  d0 x(k-n),
d0 x(k-n),
то, с использованием функции отклика, сигнал на выходе фильтра можно рассматривать как суперпозицию запаздывающих импульсных реакций на входную последовательность взвешенных импульсов:
y(k) =  h(n) (d0 x(k-n)) º h(n) x(k-n).
h(n) (d0 x(k-n)) º h(n) x(k-n).
Пределы суммирования в последнем выражении устанавливаются непосредственно по длине импульсного отклика h(n).
Определение импульсной реакции требуется, как правило, только для рекурсивных фильтров, так как импульсная реакция для НЦФ при известных значениях коэффициентов b(n), как это следует из выражения (1.3.1), специального определения не требует: h(n) ≡ b(n).
Если выражение для системы известно в общей форме (1.2.2), определение импульсной реакции производится подстановкой в уравнение системы импульса Кронекера с координатой k = 0 при нулевых начальных условиях. В соответствии с выражением (1.3.1) сигнал на выходе системы будет представлять собой импульсную реакцию системы.
Пример.Уравнение РЦФ: yk = xk + 0.5yk-1.
Входной сигнал: xk= do= {1,0,0,0,...}.
Расчет выходного сигнала при нулевых начальных условиях:
yo = xo+0.5 y-1 = 1+0 = 1 = ho. y1 = x1+0.5 yo = 0+0.5 = 0.5 = h1. y2 = x2+0.5 y1 = 0+0.25 = 0.25 = h2.
y3 = x3+0.5 y2 = 0.125 = h3. y4 = x4+0.5 y3 = 0.0625 = h4, и т.д.
Импульсный отклик фильтра: hk = (O.5)k, k = 0,1,2....
Определение импульсной реакции физической системы обычно производится подачей на вход системы ступенчатой функции (функции Хевисайда), которая равна uo(k) = 1 при k ³ 0, и uo(k) = 0 при k < 0:
g(k) = h(n) uo(k-n) =  h(n).
h(n).
Отсюда:
h(k) = g(k) - g(k-1).
Функция g(k) получила название переходной характеристики системы (перехода из одного статического состояния в другое). Форму реакции фильтра на функцию Хевисайда можно видеть на рис. 1.2.4 (с точки k = 10 и далее) в сопоставлении с реакцией на импульс Кронекера в точке k = 2.
1.4. Передаточные функции фильтров /л7/.
Z-преобразование. Удобным методом решения разностных уравнений линейных систем является z-преобразование. Применяя z-преобразование к обеим частям равенства (1.2.1), c учетом сдвига функций (y(k-m) ó zm Y(z)), получаем:
Y(z) amzm = X(z) bnzn, (1.4.1)
где X(z),Y(z)- соответствующие z-образы входного и выходного сигнала. Отсюда, полагая ao = 1, получаем в общей форме функцию связи выхода фильтра с его входом - уравнение передаточной функции системы в z-области:
H(z) = Y(z)/X(z) = bnzn  (1+ amzm). (1.4.2)
(1+ amzm). (1.4.2)
Для НЦФ:
H(z) = bnzn. (1.4.3)
При проектировании фильтров исходной, как правило, является частотная передаточная функция фильтра H(ω), по которой вычисляется ее Z-образ H(z) и обратным переходом в пространство сигналов определяется алгоритм обработки данных. В общей форме для выходных сигналов фильтра:
Y(z) = H(z)·X(z).
Y(z)·(1+  am·zm) = X(z)·
am·zm) = X(z)·  bn·zn
bn·zn
Y(z) = X(z)· bn·zn – Y(z)· am·zm. (1.4.4)
После обратного Z-преобразования выражения (1.4.4):
y(k) = bn·x(k-n) – am·y(k-m). (1.4.5)
При подаче на вход фильтра единичного импульса Кронекера dо, имеющего z-образ d(z) = zn = 1, сигнал на выходе фильтра будет представлять собой импульсную реакцию фильтра y(k) ≡ h(k), при этом:
H(z) = Y(z)/d(z) = Y(z) = TZ[y(k)] =  h(k)zk, (1.4.6)
h(k)zk, (1.4.6)
т.е. передаточная функция фильтра является z-образом ее импульсной реакции. При обратном z-преобразовании передаточной функции соответственно получаем импульсную характеристику фильтра:
h(k) ó H(z). (1.4.7)
Если функция H(z) представлена конечным степенным полиномом, что как правило характерно для НЦФ, то обратное z-преобразование осуществляется элементарно идентификацией коэффициентов по степеням z. Передаточная функция РЦФ также может быть представлена степенным полиномом прямым делением числителя на знаменатель правой части выражения (1.4.2), однако результат при этом может оказаться как конечным, так и бесконечным, т.е. система может иметь либо конечную, либо бесконечную импульсную характеристику. Фильтры с бесконечной импульсной характеристикой получили название БИХ-фильтров, с конечной импульсной характеристикой соответственно КИХ-фильтров. Нерекурсивные фильтры всегда являются КИХ-фильтрами, т.к. длительность импульсной реакции НЦФ определяется окном фильтра.
Примеры.
1. Передаточная функция РЦФ: H(z) = (1-z5)/(1-z).
Прямым делением числителя на знаменатель получаем: H(z) = 1+z+z2+z3+z4.
H(z) ó h(n) = {1,1,1,1,1}. Фильтр РЦФ является КИХ-фильтром.
2. Передаточная функция: H(z) = 1/(1-2z).
Методом обратного z-преобразования: h(n) = 2n. Фильтр РЦФ является БИХ-фильтром.
Устойчивость фильтров. Фильтр называется устойчивым, если при любых начальных условиях реакция фильтра на любое ограниченное воздействие также ограничена. Критерием устойчивости фильтра является абсолютная сходимость отсчетов его импульсного отклика:
|h(n)| < ¥. (1.4.8)
Анализ устойчивости может быть проведен по передаточной функции. В устойчивой системе значение H(z) должно быть конечным во всех точках z-плоскости, где |z| £ 1, а, следовательно, передаточная функция не должна иметь особых точек (полюсов) на и внутри единичного круга на z-плоскости. Полюсы H(z) определяются корнями многочлена знаменателя передаточной функции (1.4.2).
Пример.
Передаточная функция фильтра рис. 1.2.4: H(z) = b0/(1-a1z). При а1= 0.5 полюс знаменателя: zр= 2. |zр|>1. Фильтр устойчив.
Передаточная функция фильтра рис. 1.2.5: H(z) = b0/(1+a1z). При а1= 1.1 полюс знаменателя: zр= -0.909. |zр| < 1. Фильтр неустойчив, что и подтверждает пример фильтрации.
Передаточная функция фильтра рис. 1.2.6: H(z) = 0.5(1+z)/(1-z). Полюс знаменателя: zр= 1. В принципе, фильтр неустойчив, но эта неустойчивость проявляется только при k = ∞. Импульсный отклик фильтра h(n) = {0.5,1,1,1, ….}, сумма которого равна ∞ только при n = ∞, т.е. при интегрировании бесконечно больших массивов. При интегрировании конечных массивов результат всегда конечен.
Приведенный критерий устойчивости относится к несократимой дроби, т.к. в противном случае возможна компенсация полюса нулем передаточной функции и следует проверить наличие однозначных нулей и полюсов.
Проверка на устойчивость требуется только для рекурсивных цифровых фильтров (систем с обратной связью), нерекурсивные системы всегда устойчивы.
1.5. Частотные характеристики фильтров /л2,л13,л24/.
Общие понятия. От z-образов сигналов и передаточных функций подстановкой z = exp(-jwDt) в уравнение (1.4.2) можно перейти к Фурье-образам функций, т.е. к частотным спектрам сигналов и частотной характеристике фильтров, а точнее – к функциям их спектральных плотностей.
Можно применить и способ получения частотных характеристик непосредственно из разностного уравнения системы обработки данных. Так как цифровая фильтрация относится к числу линейных операций, то, принимая для сигнала на входе фильтра выражение x(kDt) = B(w) exp(jwkDt), мы вправе ожидать на выходе фильтра сигнал y(kDt) = A(w) exp(jwkDt). Подставляя эти выражения в разностное уравнение фильтра (1.2.1), получаем:
am A(w) exp(jwkDt-jwmDt) = bn B(w) exp(jwkDt-jwnDt).
A(w) exp(jwkDt) am exp(-jwmDt) = B(w) exp(jwkDt) bn exp(-jwnDt).
A(w) am exp(-jwmDt) = B(w) bn exp(-jwnDt). (1.5.1)
Передаточная частотная функция (частотная характеристика при ао=1):
H(w) = A(w)/B(w) = bn exp(-jwnDt)  [1+ am exp(-jwmDt)]. (1.5.2)
[1+ am exp(-jwmDt)]. (1.5.2)
Нетрудно убедиться, что полученная частотная характеристика повторяет функцию (1.4.2) при z = exp(-jwDt), что и следовало ожидать. Аналогично z-преобразованию (1.4.7), частотная характеристика фильтра представляет собой Фурье-образ его импульсной реакции, и наоборот. При Dt = 1:
H(w) = h(n) exp(-jwn), (1.5.3)
h(n) = (1/2p)  H(w) exp(jwn) dw. (1.5.4)
H(w) exp(jwn) dw. (1.5.4)
В общем случае H(w) является комплексной функцией, модуль которой R(w) называется амплитудно-частотной характеристикой (АЧХ), а аргумент j(w) - фазочастотной характеристикой (ФЧХ).
A(w) = |H(w)| = 
j(w) = arctg(-Im H(w)/Re H(w)).
На рис. 1.5.1-1.5.3 приведены частотные характеристики фильтров (модули и аргументы спектральных плотностей), которые были рассмотрены выше в примерах и на рис. 1.2.4 – 1.2.6. Графики приведены в границах главных диапазонов спектров и получены непосредственной подстановкой z=exp(-jwDt) при Dt=1 в уравнения передаточных функций H(z).
Рис. 1.5.1. Спектр не имеет особых точек.
Рис. 1.5.2. Спектр имеет особые точки на границах диапазонов.
Рис. 1.5.3. Спектр интегрирующего фильтра. Особая точка на нулевой частоте.
При обработке ограниченных массивов амплитуда центрального пика равна количеству точек массива.
Основные свойства частотных характеристик фильтров:
1. Частотные характеристики являются непрерывными функциями частоты.
2. При дискретизации данных по интервалам Dt функция H(w) является периодической. Период функции H(w) равен частоте дискретизации входных данных F = 1/Dt. Первый низкочастотный период (по аргументу w от -p/Dt до p/Dt, по f от -1/2Dt до 1/2Dt) называется главным частотным диапазоном. Граничные частоты главного частотного диапазона соответствуют частоте Найквиста ±wN, wN = p/Dt. Частота Найквиста определяет предельную частоту обработки данных.
3. Для фильтров с вещественными коэффициентами импульсной реакции h(nDt) функция АЧХ является четной, а функция ФЧХ - нечетной. С учетом этого частотные характеристики фильтров обычно задаются только на интервале положительных частот 0-wN главного частотного диапазона. Значения функций на интервале отрицательных частот являются комплексно сопряженными со значениями на интервале положительных частот.
Как правило, при частотном анализе фильтров значение Dt интервала дискретизации принимают за 1, что соответственно определяет задание частотных характеристик на интервале (0,p) по частоте w или (0,1/2) по f. При использовании быстрых преобразований Фурье (БПФ) вычисления спектров осуществляются в одностороннем варианте положительных частот в частотном интервале от 0 до 2p (от 0 до 1 Гц), где комплексно сопряженная часть спектра главного диапазона (от -p до 0) занимает интервал от p до 2p (для ускорения вычислений используется принцип периодичности дискретных спектров). Заметим, что при выполнении БПФ количество точек спектра равно количеству точек входной функции, а следовательно отсчет на частоте 2p, комплексно сопряженный с отсчетом на частоте 0, отсутствует. При нумерации точек входной функции от 0 до N он принадлежит точке N+1 - начальной точке следующего периода, при этом шаг по частоте равен 2p/(N+1). Современное программное обеспечение БПФ допускает любое количество точек входной функции, при этом для нечетного значения N частоте p соответствует отсчет на точке (N+1)/2, не имеющий сопряженного отсчета, а при четном значении N отсутствует отчет на частоте p (она располагается между отсчетами k=N/2 и N/2 +1). Отсчетам с номерами k главного диапазона БПФ (за исключением точки k=0) соответствуют комплексно сопряженные отсчеты N+1-k (за исключением точки k=(N+1)/2 при нечетном N).
Фазовая и групповая задержка. Задержка сигналов во времени относится к характерной особенности каузальных систем в целом, а, следовательно, рекурсивных и односторонних нерекурсивных фильтров.
Фазовая задержка, это прямая характеристика временной задержки фильтром гармонических колебаний. При подаче на вход фильтра гармоники sin wt, сигнал на выходе каузального фильтра, без учета изменения его амплитуды, равен sin(wt-j), при этом:
sin(wt-j) = sin w(t-tp), ωt-j = ω(t-tp).
Отсюда, фазовая задержка tp на частоте w равна:
tp = j /ω. (1.5.5')
При распространении (1.5.5) в целом на спектральную передаточную функцию фильтра получаем:
tp(w)= j(w) /ω. (1.5.5)
Постоянство значения tp(w) в определенном частотном диапазоне обеспечивает для всех гармоник сигнала такое же соотношение их фазовых характеристик, какое было на входе системы, т.е. не изменяет формы сигнала, если его спектр полностью сосредоточен в этом частотном диапазоне и значения АЧХ в этом диапазоне также имеют постоянное значение. Это условие является определяющим, например, для систем передачи данных, для сглаживающих и полосовых частотных фильтров.
Что касается каузальных фильтров, то они, как правило, имеют в рабочем диапазоне определенную зависимость значения tp от частоты, которая характеризуется групповым временем задержки (ГВЗ).
Допустим, что сигнал на входе фильтра представляет собой сумму двух гармоник с близкими частотами:
s(t) = cos ω1t + cos ω2t.
Тождественная тригонометрическая запись:
s(t) = 2 cos[0.5(ω1+ω2)t] · cos[0.5(ω1-ω2)t].
Эта запись показывает, что сумму двух гармоник с частотами ω1 и ω2 можно рассматривать, как амплитудную модуляцию гармоники с частотой (ω1+ω2)/2 гармоникой с частотой (ω1-ω2)/2. При прохождении через фильтр каждая из гармоник ω1 и ω2 может получить различную задержку, при этом сигнал на выходе фильтра, без учета амплитудных изменений:
s(t) = cos (ω1t-j1) + cos(ω2t-j2).
Тождественная запись:
s(t) = 2 cos[0.5((ω1+ω2)t-(j1+j2))] · cos[0.5((ω1-ω2)t-(j1-j2))].
Пульсацию колебаний выразим через групповую временную задержку tg:
cos[0.5((ω1-ω2)t-(j1-j2))] = cos[0.5(ω1-ω2)·(t-tg)].
Отсюда:
(ω1-ω2)·tg = j1-j2.
tg = (j1-j2)/(ω1-ω2) = Dj /Dω. (1.5.6)
При распространении этого выражения на непрерывную частотную характеристику фильтра:
tg(ω)= dj(w)/dω. (1.5.7)
Для вычислений ГВЗ удобно использовать комплексный логарифм передаточной функции фильтра:
Ln(H(ω)) = ln |H(ω)| + j·j(ω), j(ω) = Im[Ln(H(ω)].
tg(ω)= dj /dω = Im{d[Ln(H(ω))]/dω} = Im{dH(ω)/[H(ω)dω]}. (1.5.8)
Приближение для дискретных спектральных функций:
tg(k·Dω) ≈ (2/Dω)·Im{(Hk+1-Hk) / (Hk+1+Hk }. (1.5.9)
1.6. Фильтрация случайных сигналов /л4,л15,л24/.
Если сигнал на входе фильтра является детерминированным, то его соотношение с выходным сигналом однозначно определяется импульсным откликом фильтра. Таким же однозначным является соотношение входа - выхода и для случайных сигналов, однако в силу природы последних аналитическое представление как входного сигнала, так и отклика системы, не представляется возможным. Для описания реакции фильтра на случайный входной сигнал используется статистический подход. Если параметры входного сигнала специально не оговариваются, то по умолчанию принимается, что на вход фильтра поступает реализация случайного стационарного сигнала x(k·Dt) с нулевым средним, которая вызывает сигнал y(k·Dt) на выходе фильтра. Значение Dt, как обычно, принимаем равным 1.
Допустим, что фильтр имеет импульсный отклик h(n) = exp(-a·n), n ³ 0. Зададим на входе фильтра стационарный квазидетерминированный случайный сигнал, который не обладает свойством эргодичности, но имеет все свойства случайного сигнала и может быть описан в явной математической форме:
x(k) = A + cos(2·k+j),
где A и j - взаимно независимые случайные величины, причем значение j равномерно распределено в интервале [0, 2p]. При этом выходной сигнал определится выражением:
y(k) = h(n) * x(k-n) º h(n)×x(k-n) = A/3 + [3·cos(2k+j) + 2·sin(2k+j)]/13.
Из этого выражения следует, что выходной сигнал фильтра также является случайным и содержит те же самые случайные параметры, что и входной сигнал, а, следовательно, для него существуют определенные статистические характеристики.
Математическое ожиданиепроизвольного входного случайного стационарного сигнала x(k) на выходе фильтра определится выражением:
 = М{y(k)}= M{ h(n)·x(k-n)}= M{x(k-n)}×h(n) =
= М{y(k)}= M{ h(n)·x(k-n)}= M{x(k-n)}×h(n) =  h(n) = ·Кпс. (1.6.1)
h(n) = ·Кпс. (1.6.1)
Отсюда следует, что математическое ожидание выходных сигналов фильтра равно математическому ожиданию входных сигналов, умноженному на коэффициент усиления фильтром постоянной составляющей. При Кпс = 1 среднее значение выходных сигналов не изменяется и равно среднему значению входных сигналов. Если фильтр не пропускает постоянную составляющую сигналов (сумма коэффициентов импульсного отклика фильтра равна нулю), то случайный выходной сигнал всегда будет иметь нулевое математическое ожидание.
Корреляционные соотношения.Для центрированных входных сигналов x(k) размером (0-К) функция автокорреляции (ФАК) вычисляется по формуле:
Rx(n) = [1/(K+1-n)]  x(k)·x(k+n).
x(k)·x(k+n).
По аналогичной формуле может быть вычислена и ФАК выходных сигналов. Для произведения выходных сигналов y(k) и y(k+n), образующих функцию автокорреляции выходных сигналов, можно также записать:
y(k)×y(k+n) = 
 h(i)h(j) x(k-i)x(k+n-j).
h(i)h(j) x(k-i)x(k+n-j).
Если взять математические ожидания от обеих частей этого равенства, то, с учетом соотношения в правой части под знаками сумм
M{x(k-i) x(k+n-j)} = -Rx(k-i-k-n+j) = Rx(n+i-j),
получим:
Ry(n) = h(i)h(j) Rx(n+i-j) º Rx(n) * h(n+i) * h(n-j). (1.6.2)
Таким образом, функция автокорреляции выходного сигнала равна ФАК входного сигнала, свернутой дважды, в прямом и обратном направлении, с импульсным откликом фильтра, что сохраняет четность ФАК выходного сигнала. Для нецентрированных процессов аналогичное заключение действительно и для ковариационных функций. На рис. 1.6.1 приведен пример ФАК входной и выходной случайных последовательностей при фильтрации RC-фильтром, форма импульсного отклика которого также приведена на рисунке.
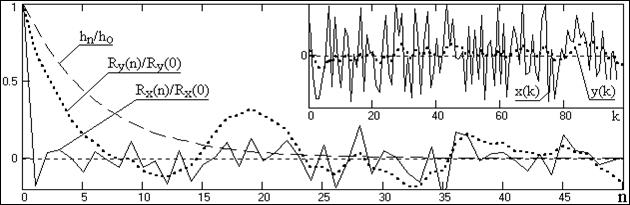
Рис. 1.6.1. Функции корреляционных коэффициентов.
Заметим, что для свертки импульсных откликов, производя замену n-j = m, мы имеем равенство:
h(n+i) * h(n-j) = h(m+i+j) * h(m) = h(m) * h(m+p) = Kh(m),
где Kh(m) - функция ковариации импульсного отклика фильтра. Отсюда:
Ry(n) = Rx(n) * Kh(m). (1.6.2')
Это означает появление в случайном сигнале на выходе фильтра определенной корреляционной зависимости, определяемой инерционностью фильтра. Эффективный интервал tk корреляции данных в сигнале тем меньше, чем выше верхняя граничная частота wв его спектра (по уровню 0.5):
tк = p/wв =1/2fв.
Оценка интервала корреляции для конечных (непериодических) функций, как правило, производится непосредственно по функциям автокорреляции R(n):
tk = 2·Sn|R(n)/R(0)| - 1,
где значение n ограничивается величиной 3-5 интервалов спада центрального пика до величины порядка 0.1×R(0) (дальше обычно начинаются статистические флюктуации значения R(n) около нулевой линии, вызванные ограниченностью выборки). Без такого ограничения за счет суммирования модуля флюктуаций, не несущих информациии, значение tk завышается относительно расчетного по спектральной характеристике сигнала.
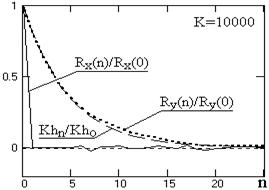 Рис. 1.6.2. Функции корреляционных
коэффициентов большой выборки.
Рис. 1.6.2. Функции корреляционных
коэффициентов большой выборки.
|
Функция Rx(n) случайных статистически независимых отсчетов близка к d-функции, свертка которой с Kh(m) приведет к формированию на выходе выходного сигнала, форма ФАК которого будет стремиться к форме Kh(m). При достаточно большой выборке случайных отсчетов входного сигнала это означает практически полное повторение функцией Ry(n) формы ковариационной функции импульсного отклика, как это можно видеть на рис. 1.6.2, который отличается от рис. 1.6.1 только количеством выборки К=10000. Соответственно, интервал корреляции выходных сигналов для случайной входной последовательности можно определять непосредственно по функции ковариации импульсного отклика фильтра:
tk = 2·Sn|Kh(n)/Kh(0)| - 1, n ≥ 0.
Для взаимной корреляционной функции (ВКФ) Rxy входного и выходного сигналов соответственно имеем:
x(k)*y(k+n) = h(i) x(k)·y(k+n-i) .
Rxy(n) = h(i) Rx(n-i) º h(i) * Rx(n-i). (1.6.3)
т.е. функция взаимной корреляции входного и выходного сигналов равна свертке ФАК входного сигнала с функцией импульсного отклика фильтра. Заключение действительно и для функций ковариации.
Другая взаимно корреляционная функция Ryx может быть получена из соотношения:
Ryx(n) = Rxy(-n) º h(i) * Rx(n+i). (1.6.3')
Отметим, что для статистически независимых случайных величин при одностороннем импульсном отклике (h(i) = 0 при i<0) функция Rxy(n) также является односторонней и равна 0 при n<0, а функция Ryx соответственно равна 0 при n>0.
Спектр мощности выходного сигнала. Если на вход фильтра с импульсным откликом h(k) ó H(f) поступает случайный стационарный эргодический сигнал x(k) ó XТ(f), имеющий на интервале Т функцию автокорреляции Rx(n) и спектр мощности Wx(f), то на выходе фильтра регистрируется стационарный эргодический сигнал y(k) ó YT(f) = XТ(f)H(f). Соответственно, энергетический спектр выходного сигнала на том же интервале:
|YT(f)|2 = |XT(f)|2 |H(f)|2. (1.6.4)
Оценка спектра мощности (спектральной плотности энергии):
Wy(f) » (1/T) |XТ(f)|2 |H(f)|2= Wx(f) |H(f)|2. (1.6.5)
Спектр мощности сигнала на выходе фильтра равен спектру мощности входного сигнала, умноженному на квадрат модуля частотной характеристики фильтра. С учетом четности корреляционных функций спектр мощности выходного сигнала также является четной действительной функцией и не имеет фазовой характеристики процесса.
Спектр мощности сигнала и его функция автокорреляции связаны преобразованием Фурье:
Ry(n) ó |Y(w)|2 = Wy(w).
Дисперсия выходного сигнала(средняя мощность) определяется с использованием формулы (1.6.5):
sy2 = Ry(0) =  Wx(f) |H(f)|2 df º Rx(0) h2(n) = sx2 h2(n). (1.6.6)
Wx(f) |H(f)|2 df º Rx(0) h2(n) = sx2 h2(n). (1.6.6)
Если сигнал нецентрированный и значение дисперсии входного сигнала неизвестно, то по аналогичным формулам вычисляется сначала средний квадратвыходного сигнала или так называемая средняя мощность сигнала:











