Авторулевой типа АТР2-10
Основные сведения
Авторулевой типа АТР предназначен для управления гидравлическими рулевыми машинами типизированного ряда.
Эти авторулевые имеют буквенно-цифровое обозначение, состоящее из букв АТР и последующих трёх цифр, например: АТР2-10.
Цифры после букв обозначают следующее:
1. первая – тип насоса рулевой машины ( 1 – насос постоянной подачи, 2 – пере-
менной подачи );
2. вторая – число пультов управления ПУ;
3. третья - число пультов следящего управления ПСУ.
Отличие между ПУ и ПСУ следующее: ПУ обеспечивает 3 вида управления руле-
вым приводом – автоматическое, простое и следящее, ПУ – только следящее.
Место установки ПУ – мостик или рулевая рубка, ПCУ – навигационная палуба ( выше палубы мостика ).
Таким образом, обозначение АТР2-10 означает следующее: авторулевой, предна-
значенный для работы с рулевыми машинами типизированного ряда, рулевая машина с насосом переменной подачи, пульт управления –1, пульт следящего управления – отсутст-
вует ( 0 ).
Комплектация авторулевого типа АТР2-10 ( рис. 285 )
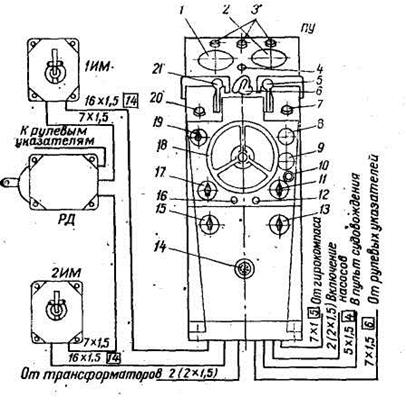
Рис. 285. Пульт управления и схема соединений авторулевого типа АТР2-10
Авторулевой типа АТР2-10 состоит из трёх частей:
1. пульт управления ПУ - 1,
2. исполнительный механизм типа ИМ-1 или ИМ-2 – 2 шт. ( по числу рулевых аг-
регатов, один из который находится в работе, второй – в резерве );
3. рулевой датчик –1.
Пульт управления в виде тумбы находится на мостике или в рулевой рубке, пред-
назначен для автоматического, следящего и простого управления.
Органами управления являются:
1. при простом управлении - кнопочный пост с кнопками «Лево руля», «Право руля»;
2. при следящем – штурвал;
3. при автоматическом управлении - сельсин-приемник курса СПк ( см. рис. 286, машина М7 ). Этот сельсин электрически связан с судовым гирокомпасом.
4. при аварийном управлении – откидная рукоятка снаружи корпуса исполнитель-
ного механизма ИМ1 ( ИМ2 ), показанная на рис. 285.
Снаружи пульта управления расположены следующие органы управления, контро
ля и сигнализации ( рис. 285 ):
1 – указатель курса ( репитер гирокомпаса );
2 – указатель положения руля ( рулевой аксиометр );
3 – сигнальные лампочки: левая «Простое управление», средняя «Следящее управ-
ление», правая «Автоматическое управление»;
4 – гнездо узла согласования указателей курса ( принимающих сельсинов ) с основ-
ным прибором;
5 – клавиша нажимная «право руля»;
6 – переключатель видов управления «Простое», «Следящее», «Автоматическое»;
7 – сигнальная лампа «в работе насос №1»;
8 – шкала интегратора;
9 – шкала регулятора коэффициента обратной связи ( КОС );
10 – регулятор КОС;
11 – переключатель чувствительности «Грубо-точно»;
12 – регулятор яркости ламп подсветки шкал приборов, указанных в пп. 1 и 2;
13 – переключатель «пуск насоса №1»;
14 – гудок, включается при уходе судна с курса на угол, больший допустимого;
15 – переключатель «пуск насоса №2»;
16 – регулятор яркости сигнальных ламп ( см. п 3 );
17 – переключатель акустического сигнала об уходе с курса;
18 – штурвал, используется при следящем и автоматическом управлении;
19 – регулятор сигнала тахогенератора;
20 – сигнальная лампа «в работе насос №2»;
21 - клавиша нажимная «лево руля».
От пульта управления ПУ к исполнительным механизмам1ИМ и 2ИМидут двамногожильных кабеля ( 16х1,5 ).
Рулевой датчик РД связан с исполнительными механизмами также двумя много-
жильными кабелями ( 7х1,5 ).
Кроме того, в пульт входят:
1. многожильный кабель ( 7х1 ) от гирокомпаса;
2. двухжильный кабель «Включение насосов», для включения приводных
двигателей насосов рулевых машин;
3. многожильный кабель ( 5х1,5 ) из пульта судовождения;
4. многожильный кабель ( 7х1,5 ) от рулевых указателей.
Исполнительные механизмы в виде прямоугольных металлических коробок нахо-
дятся в румпельном отделении непосредственно на корпусах насосов ( сбоку или сверху ). Предназначены для управления насосами постоянной ( ИМ-1 ) или переменной ( ИМ-2 ) подачи.
На корпусе каждого ИМ находится поворотная рукоятка аварийного ручного управ
ления насосом по командам с мостика.
При нормальной работе эти рукоятки зафиксированы в нейтральном положении при помощи пружинных зажимов и не влияют на работу насоса.
При аварийном ручном управлении рукоятки выводятся из зажимов и при этом
механически соединяются с гидрозолотником.
Поворот рукоятки на определённый угол изменяет подачу насоса, а значит, ско-
рость перекладки руля. Изменение же направления поворота рукоятки относительно ней-
трального положения приводит к изменению направления перекладки руля.
Рулевой датчик РД в виде прямоугольной металлической коробки находится в румпельном отделении рядом с головкой баллера руля.
Внутри коробки размещён сельсина-датчика угла поворота руля СД-Р. Его ротор механически связан с баллером руля через зубчатую передачу.
При повороте руля на выходе СД-Р появляется напряжение, пропорциональное уг-
лу перекладки руля. Это напряжение поступает в схему управления рулевой машиной.
Принципиальная схема авторулевого типа АТР2-10( рис. 286 )
Конструктивно авторулевой состоит из 3-х основных блоков , ранее показанных на рис. 285. На рис. 286 границы этих блоков обозначены пунктирными линиями:
1. пульт управления ПУ в рулевой рубке;
2. исполнительный механизм ИМ в румпельном отделении;
3. рулевой датчик РД в румпельном отделении.
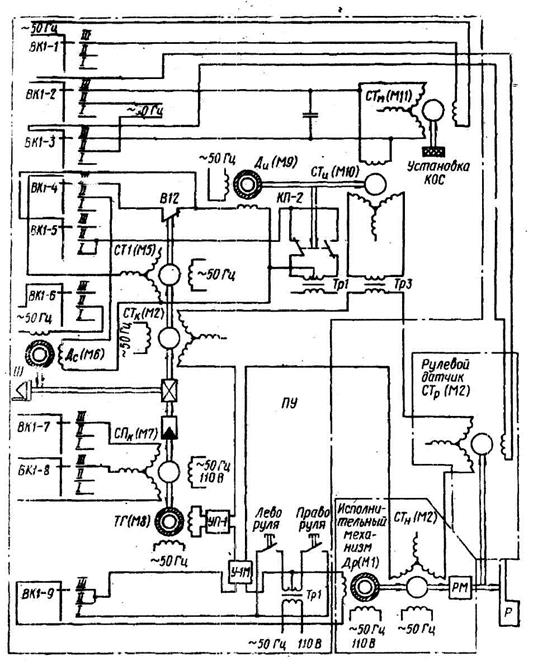
Рис. 286. Принципиальная схема авторулевого типа АТР2-10
Дата добавления: 2020-02-05; просмотров: 1249;
Поиск по сайту
Узнать еще
- D - триггер типа «защелка»
- А). Классификация предпринимательских структур по типам на втором этапе становления постсоветского предпринимательства.
- А). Классификация предпринимательских структур по типам на первом этапе становления постсоветского предпринимательства
- Автогенераторы LC-типа
- Автоколебательные системы томпсоновского типа
- Алгоритм управления разомкнутой системы первого типа имеет вид
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
