Аэродинамические схемы вертолетов и их анализ. Одновинтовая схема с рулевым устройством
Рассмотрим основные аэродинамические схемы винтокрылых ЛА, осуществляющих вертикальный валет и посадку с помощью несущих воздушных винтов — вертолеты, винтокрылы, конвертопланы.
Большинство вертолетов имеет механический привод несущего винта (НВ), когда при создании тяги на него действует реактивный момент, равный крутящему моменту и стремящийся развернуть корпус в направлении, обратном направлению вращения. Компенсация реактивного момента у одновинтовых вертолетов осуществляется с помощью различных рулевых устройств, у двухвинтовых и многовинтовых — путем уравновешивания вращающихся в противоположном направлении винтов или за счет наклона их осей вращения.
На вертолетах с реактивным приводом несущего винта реактивный момент равен нулю, поскольку силы сопротивления лопастей уравновешиваются тягой реактивных двигателей или других устройств, установленных на концах лопастей.
Выбор схемы зависит от назначения вертолета, его летно-технических и эксплуатационных характеристик, от уровня развития техники в период создания вертолета, а также от технического уровня проектирования в данном КБ при разработке вертолета конкретной схемы.
Часто оказывается, что созданные разными фирмами под одно задание вертолеты различных схем имеют близкие летно-технические характеристики, и при этом каждая схема имеет преимущества на определенных режимах полета. Следует также учитывать, что вертолет в большинстве случаев является многорежимным и многофункциональным ЛА, поэтому выбор его схемы является комплексной многокритериальной задачей.
Одновинтовая схема с рулевым устройством. По этой схеме в виду ее компактности, простоты трансмиссии и других преимуществ построено наибольшее количество вертолетов в мире.
Классическая схема с рулевым винтом предложена Б. Н. Юрьевым в 1911 г. В этой схеме (см. табл. 3.2.1) реактивный вращающий момент уравновешивается моментом, создаваемым тягой рулевого винта (РВ), установленного на хвостовой балке. На привод рулевого винта расходуется 8... 15% мощности, затрачиваемой на вращение НВ.
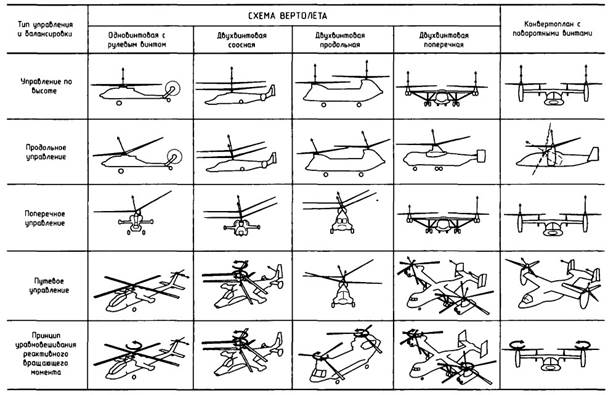
Таб. 3.2.1. Принципы управления и балансировки вертолетов и конвертоплана
Основные типы рулевых устройств можно разделить на следующие:
- использующие тяги рулевых винтов, установленные в продольной плоскости, или воздушного винта, установленных на крыльях;
- создающие аэродинамическую силу в индуктивном потоке, отбрасываемом несущим винтом;
- с дефлекторами, отклоняющими поток от воздушного винта, установленного в хвостовой части фюзеляжа;
- создающие реактивную силу струи, выдуваемую вбок из сопла на конце хвостовой балки.
Рулевой винт выполнен обычно толкающим по отношению к килю с целью уменьшения потерь тяги на обдувку на “моторных” режимах работы НВ, когда мощность подводится к его валу. На режиме авторотации, когда с НВ снимается небольшая мощность, тяга РВ меняет знак. Для уменьшения длины хвостовой балки и габаритов вертолета нагрузка на ометаемую площадь РВ обычно выше чем у НВ почти в 2 раза.
Рулевой винт также обеспечивает путевое управление и путевую устойчивость вертолета. В горизонтальном полете реактивный момент может уравновешиваться несимметричным килем, имеющим угол заклинення, а также шайбами, устанавливаемыми на концах стабилизатора под углом заклинення по отношению к продольной оси вертолета. Киль и шайбы обеспечивают путевую устойчивость вертолета в горизонтальном полете. Установка киля и шайб позволяет разгрузить рулевой винт, повысить его ресурс, а за счет снижения сопротивления уменьшить расход топлива в полете.
Вращающиеся лопасти РВ, близко расположенные от поверхности земли, представляют повышенную опасность для обслуживающего персонала и могут явиться причиной аварий и поломок лопастей при полете вблизи препятствий и эксплуатации на площадках ограниченных размеров.
Этот недостаток отсутствует у рулевого устройства фенестрона, состоящего из многолопастного винта, расположенного в профилированном кольцевом канале киля (рис. 3.2.1). Киль защищает от повреждений лопасти винта. Боковая сила, уравновешивающая реактивный момент, создается тягами винта и кольца за счет разрежения, возникающего на его поверхности, а также боковой силой несимметричного киля в горизонтальном полете.
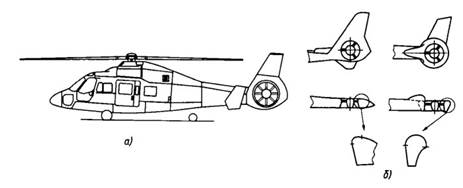
Рис. 3.2.1. Вертолет Ка-60 и различные формы коллектора входного устройства фенестрона
Диаметр фенестрона меньше диаметра традиционного рулевого винта, что позволяет уменьшить передаточное число хвостового редуктора, а следовательно, массу трансмиссии. При этом отпадает необходимость в промежуточном угловом редукторе, что также снижает массу.
На режиме висения при уменьшении диаметра винта на привод фенестрона требуется большая мощность, чем на рулевой винт. В горизонтальном полете затраты могут быть меньшими на несколько процентов или такими же, как у рулевого винта. Развитый по площади киль фенестрона позволяет в случае выхода из строя хвостовой трансмиссии или винта фенестрона осуществлять горизонтальный полет и посадку вертолета с небольшим углом скольжения.
Впервые фенестрон был применен на вертолете SA-341 “Газель” фирмы Аэроспасьяль (Франция), а затем на вертолетах SA-360 и SA- 365. В настоящее время фенестроны установлены на вертолетах фирмы Еврокоптер, на вертолете RAH-66 “Команч” совместного производства фирм “Сикорский” и “Боинг”, а также на отечественном вертолете Ка-60 фирмы “Камов” (см. рис. 3.2.1, а).
Винты фенестрона имеют большее количество лопастей Кл = 9... 13, чем рулевые винты, что снижает уровень вибраций, передаваемых на хвостовую балку и повышает “живучесть” винта при повреждении лопастей.
Аэродинамическая компоновка фенестрона выбирается такой, чтобы верхняя поверхность киля, выполняемая несимметричной с углом заклинення, создавала (в горизонтальном полете) боковую силу, необходимую для полной компенсации реактивного момента на крейсерском режиме полета. При этом винт фенестрона практически не создает тяги. Нижняя часть киля выполняет функции защитного устройства при ударе о землю.
Форма коллектора входного устройства может выполняться заподлицо с поверхностью киля (см. рис. 3.2.1, 6) с целью уменьшения его сопротивления в горизонтальном полете или выступать за поверхность киля с целью реализации большей силы тяги, развиваемой кольцом на режиме висения.
В последнем случае на режиме горизонтального полета сопротивление фенестрона будет большим из-за срыва потока в хвостовой части. На некоторых вертолетах (Белл-400) фенестрон представляет собой торообразное защитное устройство хвостового винта с килем: устройство частично сохраняет функции фенестрона, а также простоту и преимущества рулевого винта, имеющего меньшие затраты мощности на режиме висения из-за большего диаметра.
Фенестрон устанавливается на вертолетах взлетной массы до 6 т. Для вертолетов большей взлетной массы применение фенестрона с энергетической точки зрения становится нецелесообразным.
Рулевое устройство типа NOTAR (No Tail Rotor — без хвостового винта) обеспечивает уравновешивание реактивного момента за счет боковой аэродинамической силы, возникающей на хвостовой балке, а также за счет реактивной силы воздуха, выдуваемого из боковых сопел, расположенных в концевой части хвостовой балки (рис. 3.2.2).
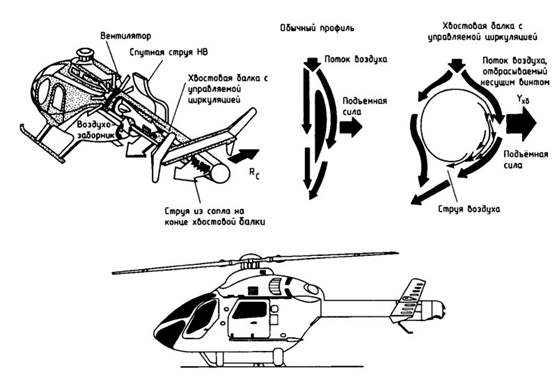
Рис. 3.2.2. Принципиальная схема работы рулевого устройства типа NOTAR и вертолет фирмы Макдоннел-Дуглас MD 900 с системой NOTAR
В такой системе воздух, нагнетаемый в хвостовую балку с помощью вентилятора, выдувается через одно или два щелевых сопла, расположенных вдоль хвостовой балки, а также через боковые сопла в конце хвостовой балки. На хвостовой балке, обдуваемой потоком от НВ, возникает аэродинамическая сила Yхб, которая вместе с реактивной силой бокового сопла Rc уравновешивает реактивный момент на валу НВ. Изменением расхода воздуха через боковые сопла осуществляется путевое управление. Путевая устойчивость обеспечивается с помощью килевых поверхностей.
Преимущество системы NOTAR заключается в отсутствии разнесенных масс на конце хвостовой балки, уменьшении момента инерции относительно оси вращения НВ и поперечной оси, упрощении конструкции, увеличении весовой отдачи, уменьшении сопротивления в полете, а также в повышении безопасности.
Вместе с тем, такая система требует больших затрат мощности на уравновешивание реактивного момента, особенно на режиме висения (до 17%). Система NOTAR впервые была испытана фирмой Хьюз на вертолете Хьюз-500 и в дальнейшем применяется на вертолете MD- 520N фирмы Макдоннел-Дуглас, серийно выпускаемого с 1991 г., а также на вертолетах MD-600N и MD-900.
Уравновешивание реактивного момента только за счет реактивной силы выдуваемого воздуха требует больших затрат мощности (до 20..35% потребной для работы НВ).
Трансмиссия вертолета одновинтовой схемы относительно проста и включает промежуточный редуктор двигателя, вал, передающий мощность к главному редуктору, главный редуктор, а также хвостовой вал, передающий мощность к рулевому устройству различного типа. На современных вертолетах обычно применяются турбовальные двигатели, а на легких вертолетах — и поршневые. Передаточное отношение главного редуктора возрастает с увеличением массы вертолета и радиуса его НВ.
Главные редукторы средних и тяжелых вертолетов в большинстве случаев включают планетарные ступени. Частота вращения хвостовых валов выбирается по возможности большей для уменьшения их массы.
Управление одновинтовым вертолетом, за исключением путевого, осуществляется несущим винтом посредством автомата перекоса, позволяющего изменять угол установки у всех лопастей одновременно — общий шаг (ОШ), или циклически по первой гармонике — циклический шаг (ЦШ).
С помощью циклического шага конус, описываемый лопастями НВ, и тяга НВ наклоняются в нужном направлении, и при этом создается управляющий момент относительно центра масс вертолета. Кроме того, на втулке создается момент того же знака, пропорциональный разносу осей горизонтальных шарниров.
Управление по высоте (вертикали) осуществляется с помощью ОШ (см. табл. 3.2.1) посредством ручки ОШ, одновременно позволяющей изменять мощность двигателя. Продольное управление (по углу тангажа) осуществляется наклоном тяги в продольной плоскости, а поперечное (по углу крена) — в поперечной плоскости с помощью ручки, связанной с ЦШ. Путевое управление производится изменением тяги РВ или другого рулевого устройства с помощью педалей.
Особенность управления вертолетом заключается в наличии перекрестных связей, когда воздействие на один орган управления требует одновременно воздействия на другие. Так, при изменении тяги НВ с помощью ручки ОШ одновременно изменяется реактивный момент. Для его уравновешивания необходимо отклонить педали для изменения ОШ хвостового винта и его тяги, которую, в свою очередь, необходимо уравновешивать отклонением ручки ЦШ вбок и наклоном тяги НВ.
Балансировка вертолета осуществляется посредством ЦШ с помощью автомата перекоса, угол наклона которого имеет конструктивные ограничения. Поэтому диапазон изменения центровок вертолета одновинтовой схемы ограничен. Для расширения диапазона центровок на некоторых вертолетах плоскость вращения РВ наклонена относительно продольной оси вертолета, благодаря чему появляется направленная вверх составляющая тяги хвостового винта. Пилотирование вертолета в этом случае производится с применением автопилота. Система управления одновинтового вертолета наиболее проста по сравнению с системами управления вертолетов других схем.
Для разгрузки НВ в горизонтальном полете на вертолетах одновинтовой схемы могут устанавливаться крылья, которые на боевых вертолетах служат также для подвески вооружения. На режимах висения и полета с малыми скоростями крыло, обдуваемое потоком от НВ, обуславливает потери тяги.
Вертолеты одновинтовой схемы обладают меньшим аэродинамическим сопротивлением по сравнению с вертолетами других схем благодаря возможности реализовать обтекаемую форму фюзеляжа, малому сопротивлению втулки, возможности капотирования автомата перекоса и вала HB. НВ работает в свободном потоке, т.е. не подвержен влиянию интерференции, как это происходит в двухвинтовых схемах.
Потери тяги на обдувку фюзеляжа на режиме висения по сравнению с двухвинтовыми вертолетами продольной и поперечной схемы меньше, поскольку фюзеляж находится в области обдувки на небольших радиусах от оси НВ, где индуктивные скорости, отбрасываемые НВ и возрастающие с ростом радиуса, еще невелики.
Конструктивно одновинтовой вертолет является компактным. Нагрузки, создаваемые массой полезной нагрузки, располагаемой в фюзеляже, передаются к НВ по наиболее короткому пути, чем обеспечивается высокая жесткость конструкции и меньшая подверженность автоколебаниям различного вида. Уровень вибраций, передаваемых от НВ к фюзеляжу зависит от числа лопастей и уменьшается с ростом их количества.
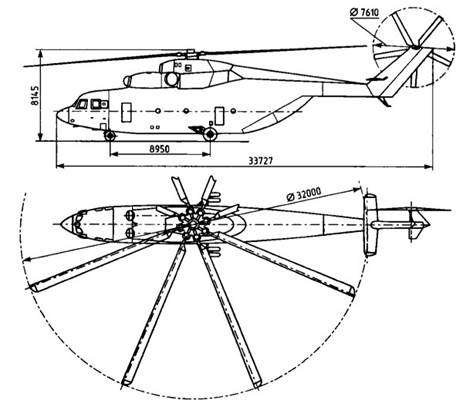
Рис. 3.2.3. Вертолет Ми-26
По одновинтовой схеме строятся вертолеты различных весовых категорий — от сверхлегких до тяжелых. В настоящее время самым грузоподъемным в мире серийным вертолетом является вертолет Ми-26 (рис. 3.2.3), способный перевозить грузы массой 20 т. Вертолету Ми-26 принадлежит мировой рекорд поднятия груза массой 25 111 кг на высоту 2000 м, установленный в 1982 г. Мировой рекорд скорости принадлежит одновинтовому вертолету “Линке” фирмы Уэстленд (Великобритания) и составляет 400,87 км/ч. Вертолеты одновинтовой схемы имеют самое различное назначение и применяются как в гражданских, так и в военных областях.
Дата добавления: 2023-12-08; просмотров: 2426;
Поиск по сайту
Узнать еще
- Аппаратура для звукозаписи. Схема
- Два прибора по автоматике. Примеры и схемы
- Деление клеток. Схема последовательных стадий митоза
- Динамический анализ. Продвижение разломов в сложных системах
- Кинематические схемы уборки и выпуска шасси
- Классификация самолетов и вертолетов
- Конструктивно-силовые схемы фюзеляжей

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
