Кинематические схемы уборки и выпуска шасси
Кинематические схемы уборки и выпуска шасси определяют: положение стойки шасси в убранном и выпушенном положениях; траектории движения элементов конструкции стойки; кинематические характеристики всех подвижных и неподвижных шарнирных соединений шасси; геометрические параметры механизмов уборки и выпуска стойки шасси и створок; местоположение замка, фиксирующего стойку шасси в убранном положении.
Кинематический анализ схемы уборки и выпуска позволяет: согласовать параметры механизма уборки и выпуска и энергетической системы, обеспечивающей уборку и выпуск за время, заданное техническими требованиями; оценить совершенство кинематической схемы и внести в нее необходимые изменения.
На подавляющем большинстве самолетов кинематические схемы уборки и выпуска стоек шасси выполнены таким образом, что поворот стойки и перемещение ее элементов из одного положения в другое осуществляются в одной из плоскостей связанной системы координат самолета (либо параллельной ей): передние опоры — в плоскости XOY, основные — в плоскостях XOY или YOZ.
Построение таких кинематических схем основано на одном из положений теоремы Бернулли: перемещение фигуры на плоскости из одного положения в другое можно выполнить одним поворотом около одного центра. Нахождение положения такого центра на плоскости уборки и выпуска шасси не является трудоемким и сложным процессом. Конструкции отдельных элементов стойки шасси таких кинематических схем имеют относительно простую форму и в большинстве своем симметричны.
Самое важное — согласовать положение оси вращения стойки (окончательно утвердить убранное и выпущенное положения стойки) с расположением силовых элементов планера (утвердить конструктивно-силовую схему агрегата планера, к которому осуществляется привязка узлов крепления стойки).
Однако достаточно часто такие схемы не позволяют обеспечить компоновку стойки в убранном положении в объемы отведенной для этого ниши. Приходится применять схемы, в которых перемещение стойки и ее элементов происходит в плоскостях, расположенных под углами к плоскостям связанной системы координат самолета.
При разработке таких схем одной из основных задач является определение положения в пространстве оси и нахождение на ней точки, относительно которой вращается стойка шасси в процессе ее уборки и выпуска. Теоретически эта задача решается на основании теоремы Д’Аламбера: всякое перемещение тела, вращающегося около неподвижного центра, из одного положения в другое можно выполнить одним поворотом около некоторой оси, проходящей через неподвижную точку.
Положение стойки шасси, имеющей неподвижную точку, определяется положением двух его точек, не лежащих на прямой, проходящей через неподвижную точку. За такие две точки могут быть приняты точки на опорном элементе стойки либо на его оси. На основании этой теоремы составляется система уравнений, решением которой является система, описывающая положение оси вращения стойки шасси при ее уборке и выпуске.
Примером такого решения может быть основная стойка самолета Су-27 (рис. 2.8.11, а и б). На рис. 2.8.11, а показана первоначальная идея разворота плоскости колеса в убранное положение с помощью “поводка”, который поворачивает амортизатор вместе с колесом внутри внешнего цилиндра стойки.
На рис 2.8.11, б показан окончательный вариант стойки, в котором пространственная ориентация оси уборки и выпуска основной ноги шасси (она же является осью траверсы и не паралельна ни одной из осей связанной системы координат) позволила обеспечить и уборку стойки, и развернуть плоскость колеса в нужное положение.

Рис. 2.8.11. Основная опора самолета Су-27 н МиГ-23
Возможна ситуация, при которой заданные убранное и выпущенное положения стойки определяют такое искомое пространственное положение оси поворота стойки, при котором эта ось оказывается вне обводов планера самолета, а следовательно, нормально не провязывается конструктивное решение узлов крепления стойки к планеру.
В такой ситуации необходимо менять положения стойки в убранном или выпущенном положениях либо идти на существенное усложнение кинематической схемы уборки и выпуска и конструкции стойки введением двух осей вращения элементов стойки относительно планера и между собой. Примером такого решения является конструкция основной стойки шасси самолета МиГ-23.
На рис. 2.8.11, в-д показана последовательность выпуска основной стойки этого самолета, при которой в начальный момент выпуска осуществляется поворот стойки относительно оси А, а затем рычаг с колесом с помощью системы качалка — поводок поворачивается относительно оси Б и фиксируется в выпущенном положении.
Кинематические схемы убираемых шасси. С точки зрения решения тех или иных проектно-конструкторских вопросов убираемых в полете шасси кинематических схем очень много. Но можно выделить некоторые проблемы, решение которых определяет целесообразность классификации кинематических схем, что позволит выявить положительные и отрицательные свойства выбираемых схем уборки, способов поворотов и линейных перемещений колес и амортизаторов при уборке и выпуске шасси и разработать рекомендации для проектирования.
Наиболее целесообразна классификация для стоек шасси балочного типа, как наиболее часто используемых для убирающихся шасси. Балка дает возможность объединить и сблизить основные элементы стойки (амортизатор, колеса, рычаги, механизмы разворота колес и тележек и т.д.), что позволяет уменьшить потребные объемы ниш шасси, площади створок этих ниш и число самих створок.
В большинстве схем убирающихся шасси балка вращается относительно неподвижной оси, а вращение остальных кинематических звеньев стойки происходит относительно осей, параллельных оси балки, что позволяет упростить конструкцию шарниров. Как правило, балочные убирающиеся шасси выполняют по статически определимым системам и при расчете на прочность таких систем можно не учитывать деформации конструкции и зазоры в подвижных и неподвижных соединениях, так как они практически не оказывают влияния на распределение сил.
Классификационные группы шасси. По способам обеспечения геометрической неизменяемости силовых схем шасси, включению (или невключению) механизмов уборки и выпуска шасси в силовую схему опор шасси и согласно законам строительной механики все конструкции убирающихся шасси самолета могут быть разделены на четыре группы.
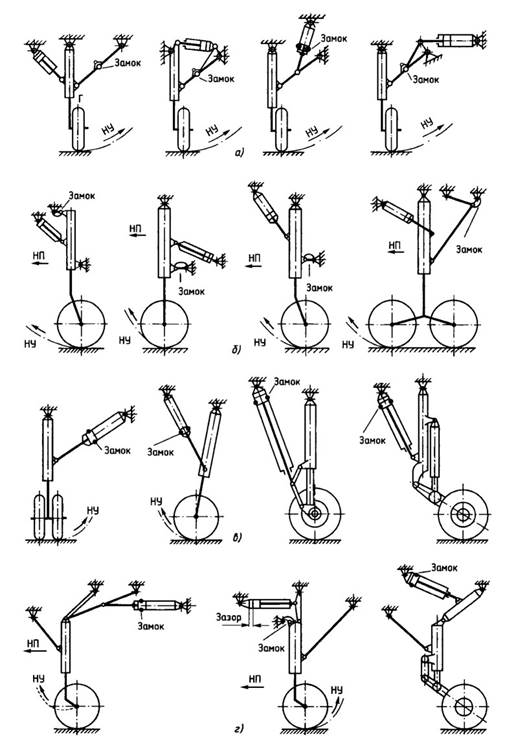
Рис. 2.8.12. Классификационные группы шасси: НП — направление полета; НУ — направление уборки
К первой группе относятся шасси (рис. 2.8.12, а), у которых геометрическая неизменяемость силовых схем при выпущенном положении шасси обеспечивается подкосами, чаще складывающимися. Фиксация подкосов обеспечивается замками, устанавливаемыми в подкосы или в “нулевые” стержни, фиксирующими неизменное положение подкосов, а также у которых механизмы уборки и выпуска не являются элементами силовых схем шасси (считаются “нулевыми” стержнями).
Ко второй группе относятся шасси (рис. 2.8.12, 6), у которых геометрическая неизменяемость силовых схем при выпущенном положении шасси обеспечивается замками, прикрепляющими балку или подкос стойки непосредственно к планеру, механизмы уборки и выпуска не являются элементами силовых схем шасси (считаются “нулевыми” стержнями).
К третьей группе относятся шасси (рис. 2.8.12, в), у которых геометрическая неизменяемость силовых схем при выпущенном положении шасси обеспечивается механическими замками, установленными в гидравлических цилиндрах уборки и выпуска, гидравлические цилиндры уборки и выпуска, являющиеся силовыми стержнями силовых схем шасси, воспринимающими действующие на стойку шасси наземные нагрузки.
К четвертой группе относятся шасси (рис. 2.8.12, г), у которых опорные балки (стойки) состоят из двух частей, геометрическая неизменяемость силовых схем при выпущенном положении шасси обеспечивается способами, применяемыми в шасси первой, второй и третьей групп, механизмы уборки и выпуска могут являться силовыми элементами силовых схем шасси или “нулевыми” стержнями в зависимости от того, по способу какой классификационной группы обеспечивается геометрическая неизменяемость силовой схемы.
Дата добавления: 2023-12-08; просмотров: 2465;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
