ОСНОВНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ
Под законом управления понимается математическая зависимость, в соответствии с которой формируется управляющее воздействие, подаваемое на объект управления. В зависимости от решаемых задач, существует большое количество законов управления. Однако наиболее распространенными являются законы управления по отклонению, интегралу от отклонения и первой производной по времени.
Управляющее устройство, осуществляющее закон управления по отклонению, называют пропорциональным (П)
 ,
,
 - коэффициент передачи управляющего устройства.
- коэффициент передачи управляющего устройства.
Математическая зависимость, соответствующая интегральному закону
управления (И) имеет вид
 ,
,
 – постоянная времени интегрирования.
– постоянная времени интегрирования.
Пропорционально-интегральный закон (ПИ) запишем в виде
 +
+  ).
).
И, наконец, наиболее общим является пропорционально-интегрально-дифференциальный закон (ПИД)
+  ),
),
где  - постоянная времени дифференцирования.
- постоянная времени дифференцирования.
Проведем моделирование работы нейтрального объекта, описываемого дифференциальным уравнением 2-го порядка, с помощью математического пакета MATLAB 6.
На Рис.1.11 приведена схема моделирования, содержащая нейтральный объект управления, на вход которого подан ступенчатый сигнал. Входной и выходной сигнал объекта отображаются на графиках Рис.1.12.
На Рис.1.11 также изображены схемы замкнутых систем управления с обратной связью, в которой реализованы П, ПИ и ПИД законы управления. На вход этих схем подается ступенчатый сигнал, а их выходные сигналы отображены на графиках Рис.1.12.
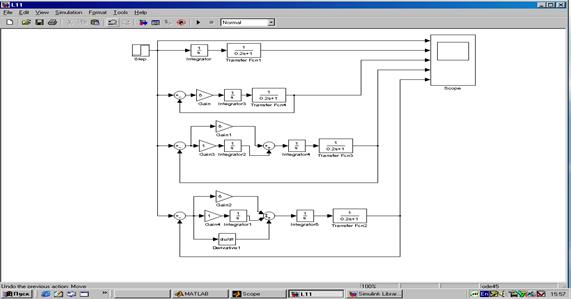
Рис.1.11.
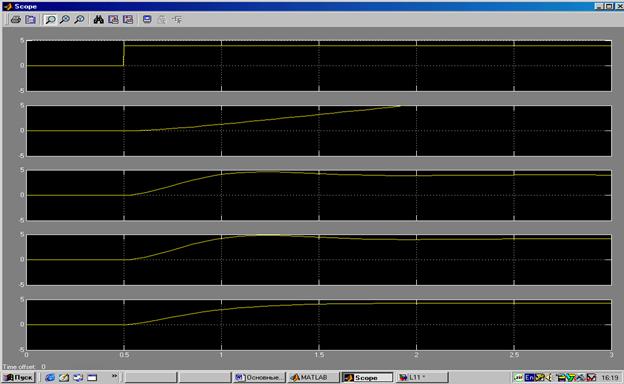
Рис.1.12.
Из приведенных графиков видно, что объект без управляющего устройства работать не может, так как при подаче на вход ступенчатого воздействия, его выходной сигнал растет.
При подключении к объекту обратной связи и реализованным пропорциональным (П) законом управления, выходной сигнал, сначала превысив установившееся значение, с течением времени стремится к нему.
Аналогичный результат был получен и при применении пропорционально-интегрального (ПИ) закона управления.
При использовании пропорционально-интегрально-дифференциального (ПИД) закона управления был получен лучший результат - выходной сигнал монотонно стремился к установившемуся значению.
Выбор того или иного закона управления зависит от объекта управления и той цели, которой мы хотим достичь, применяя тот или иной закон.

Дата добавления: 2019-12-09; просмотров: 827;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- B. Департаменты и управления функционального характера.
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Языкознание и его основные разделы.
- III. Основные направления развития воспитания
- III. Основные требования к организации рассмотрения обращений граждан
- III. Основные функции ГФС России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
