Кинематические пары механизмов
При заданном движении входного звена механизма движение остальных звеньев зависит от способа их соединения, а также от основных размеров звеньев – расстояний между соединениями данного звена с другими звеньями. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Допуская относительное движение соединенных звеньев, кинематическая пара ограничивает их свободное перемещение, «накладывает связи». Это позволяет обеспечить заданное движение звеньев в механизме. С помощью кинематических пар движения всех звеньев механизма закономерным образом связаны. Кинематическую пару образуют элементы кинематической пары. Каждый элемент принадлежит одному из звеньев и представляет собой совокупность поверхностей, линий и точек звена, по которым оно соприкасается с другим звеном.
По числу условий связи, наложенных парой на относительное движение, определяется класс пары. Практически удобно определять не число условий связи, а число независимых возможных перемещений, то есть число степеней свободы H звеньев в относительном движении. Так как два свободных тела имеют в относительном движении шесть степеней свободы, то число условий связи, а значит, и класс пары, определится по формуле
 . (1.1)
. (1.1)
Для определения числа возможных перемещений H мысленно останавливают одно из звеньев и жестко связывают с ним удобную систему декартовых координат. Движение другого звена мысленно раскладывают на простейшие возможные перемещения: поступательные вдоль осей координат и повороты вокруг осей так, чтобы не нарушалась (не изменялась) связь между элементами пары. При этом не обращают внимания на соединения с другими звеньями механизма. Каждое перемещение обозначают сдвоенной стрелкой.
На рис. 1 показаны конструктивные схемы некоторых соединений звеньев (см. Артоболевский И.И., Эдельштейн Б.В. «Сборник задач по теории механизмов и машин»). Кинематическая пара, соединяющая звенья на схеме рис. 1, а, является парой пятого класса, так как допускает только относительный поворот вокруг оси ox. На рис. 1, в изображена пара третьего класса, так как соединение звеньев допускает независимые повороты вокруг осей x, y, z. Обратим внимание, что винтовая пара на рис. 1, г пятого класса, хотя движение гайки 2 при неподвижном винте 1 раскладывается на поступательное по направлению оси oz и вращательное вокруг этой оси.
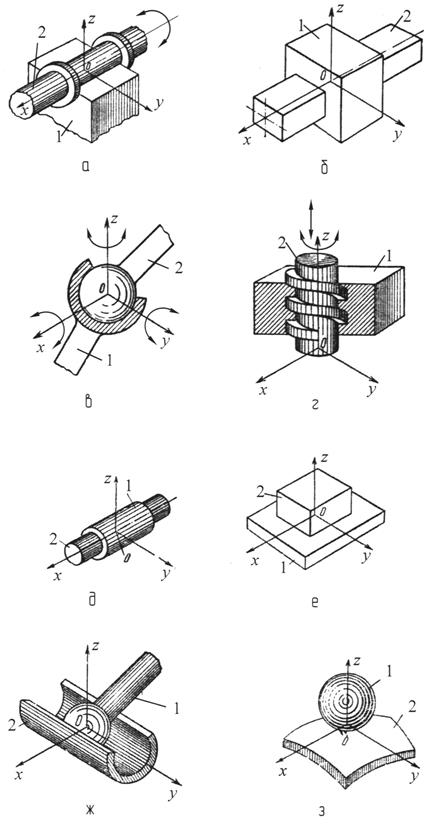
Рис. 1. Примеры кинематических пар
Дело в том, что эти движения взаимозависимы, их нельзя совершить раздельно: величине осевого перемещения строго соответствует поворот вокруг оси на определенный угол и наоборот. Следовательно, независимым надо считать только одно из этих перемещений или считать возможным перемещением движение точек гайки по винтовым линиям. Класс других пар рекомендуется определить самостоятельно.
Кинематические пары называются низшими, если их элементы соприкасаются по поверхностям. В высших парах соприкосновение элементов осуществляется по линии или в точке. Из анализа всех возможных пар следует, что пары первого и второго классов всегда высшие, пары пятого класса всегда низшие. Пары третьего и четвертого классов могут быть высшими и низшими. При подсчете общего числа степеней свободы плоских механизмов высшие пары считаются парами четвертого класса, низшие – парами пятого класса. Различают вращательные и поступательные пары пятого класса. Найдите эти пары на рис. 1. Определите, какие из восьми пар на рисунке являются высшими.
Дата добавления: 2021-12-14; просмотров: 500;
Поиск по сайту
Узнать еще
- Архитектура сетевых механизмов обеспечения качества обслуживания в IP-ориентированных сетях.
- Аэрозоли, газы и пары
- Б. Особенности нервного и гуморального механизмов регуляции функций организма.
- Ввод из пары регистров в стек
- Векторный момент пары сил
- Виды кривошипно-шатунных механизмов
- Влияние механизмов управления и тормозной системы на эффективность и безопасность работы
- Вопрос № 2. Основные узлы и принцип работы электроизмерительных механизмов.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
