Звенья, сочленения и их параметры
Механический манипулятор состоит из звеньев, соединенных вращательными или поступательными сочленениями (рис. 3.1). Каждая пара, состоящая из звена и сочленения, обеспечивает одну степень свободы. Следовательно, манипулятор с N степенями свободы содержит N пар «звено-шарнир». Звено 0 соединено с основанием, где обычно размещается инерциальная система координат динамической системы, а последнее звено снабжено рабочим инструментом.
Звенья и сочленения нумеруются по возрастанию от стойки к схвату манипулятора. Каждое звено соединено не более чем с двумя другими так, чтобы не образовывалось замкнутых цепей.
В общем случае два звена соединяются элементарным сочленением, имеющим две соприкасающиеся поверхности, скользящие друг относительно друга.
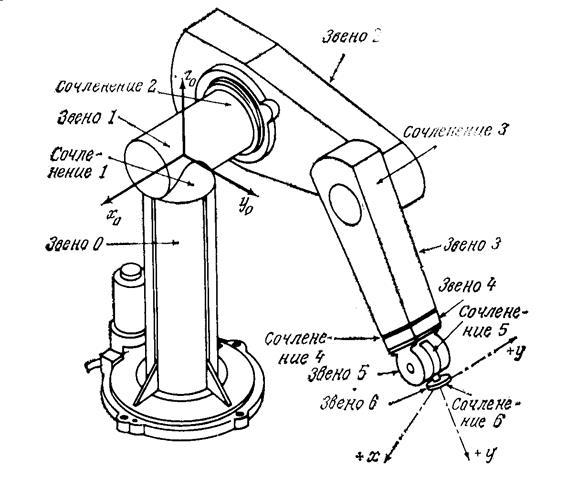
Рисунок 5.1. Звенья и сочленения манипулятора Пума
Известно всего шесть различных элементарных сочленений: вращательное, поступательное (призматическое), цилиндрическое, сферическое, винтовое и плоское (рис. 5.2.).
Из перечисленных типов сочленений в манипуляторах обычно используются только вращательные и поступательные. В месте соединения двух звеньев определяется ось i-го сочленения (рис. 5.3). Эта ось имеет две пересекающие ее нормали, каждая из которых соответствует одному из звеньев (звена i-1 и звена i), определяется величиной di – расстоянием между этими нормалями, отсчитываемым вдоль оси сочленения.
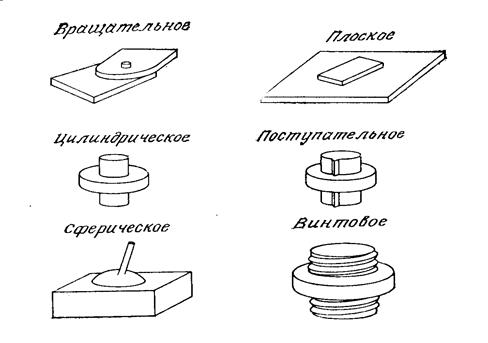
Рисунок 5.2. Элементарные сочленения
Присоединенный угол Qi между нормалями измеряется в плоскости, перпендикулярной оси сочленения. Таким образом, di и Qi можно назвать расстоянием и углом между смежными звеньями. Они определяют относительное положение соседних звеньев.
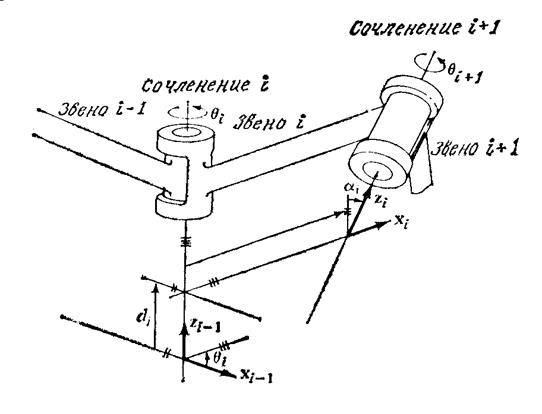
Рисунок 5.3. Система координат и ее параметры
Звено i (i=1, 2, 3, …., 6) соединено не более чем с двумя звеньями (i-1-м и i+1-м звеньями). Таким образом, в точках соединения i-го звена с двумя соседними определены две оси сочленения. Важное свойство звеньев с точки зрения кинематики состоит в том, что они сохраняют неизменной конфигурацию относительного расположения соседних сочленений, характеризуемую параметрами ai и  i. В качестве параметра ai выбрано кратчайшее расстояние между осями zi-1 и zi i-го и i+1-го сочленений соответственно, измеряемое вдоль их общей нормали. Угол i – угол между осями сочленений, измеряемый в плоскости, перпендикулярной их общей нормали. Таким образом, ai и
i. В качестве параметра ai выбрано кратчайшее расстояние между осями zi-1 и zi i-го и i+1-го сочленений соответственно, измеряемое вдоль их общей нормали. Угол i – угол между осями сочленений, измеряемый в плоскости, перпендикулярной их общей нормали. Таким образом, ai и  можно рассматривать соответственно как длину и угол скрутки i–го звена. Эти параметры характеризуют конструктивные особенности i–го звена.
можно рассматривать соответственно как длину и угол скрутки i–го звена. Эти параметры характеризуют конструктивные особенности i–го звена.
Итак, с каждым звеном манипулятора связаны четыре параметра: ai , αi di, Qi. Если для этих параметров установить правило выбора знаков , то они составят набор, достаточный для описания кинематической схемы каждого звена манипулятора. Эти параметры можно разделить на две пары: параметры звена (ai, αi), которые характеризуют конструкцию звена, и параметры сочленения (di, Qi), характеризующие относительное положение соседних звеньев.
Дата добавления: 2021-11-16; просмотров: 884;
Поиск по сайту
Узнать еще
- Аккумуляторная батарея: назначение, тип батареи и его расшифровка. Параметры аккумуляторной батареи. Приборы контроля батареи.
- Аппаратура считается в рабочем состоянии, если ее параметры в рабочем режиме соответствуют ТУ завода-изготовителя, определены ее поправки и полностью укомплектована ЗИПом.
- Б) Параметры переменной величины.
- Безразмерные параметры формоизменения в очаге деформации и связь между ними
- В. Параметры доставки пакетов IP
- ВЗАИМОЗАМЕНЯЕМОСТЬ И НОРМИРУЕМЫЕ ПАРАМЕТРЫ
- Виды и параметры несовершенств скважин
- Виды природных пожаров и их параметры

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
