Синхронные двигатели
Синхронная машина, как любая электрическая машина, обратима, т.е. может работать как в двигательном, так и в генераторном режимах. Однако особенности работы машины в том или ином режиме предъявляют различные требования к ее конструктивному исполнению. Наиболее существенным отличием условий работы синхронного двигателя является процесс включения его в сеть, называемый пуском.
Собственный пусковой момент синхронного двигателя равен нулю, так как вследствие инерции ротора поток возбуждения  не может сразу достичь синхронной частоты вращения потока статора
не может сразу достичь синхронной частоты вращения потока статора  . Поэтому после включения возбуждения двигателя в сеть при
. Поэтому после включения возбуждения двигателя в сеть при  поля и перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
поля и перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
Пуск синхронного двигателя можно осуществить с помощью преобразователя частоты, который плавно повышает частоту вращения поля якоря от нуля до номинального значения по мере разгона двигателя. Такой способ пуска называется частотным. Возможен также пуск синхронного двигателя при помощи дополнительного асинхронного двигателя, осуществляющего предварительный разгон недовозбужденного синхронного двигателя до подсинхронной частоты вращения. Затем производится включение синхронного двигателя в сеть и его синхронизация по методу грубой синхронизации подобно тому, как это делается для синхронных генераторов.
|
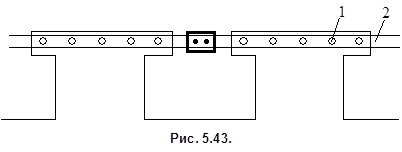
Однако наиболее распространенным является асинхронный пуск синхронного двигателя. С этой целью на роторе в специальных пазах полюсных наконечников явнополюсных синхронных двигателей размещают короткозамкнутую обмотку (рис. 5.43) в виде латунных, медных или бронзовых стержней 1, соединенных по торцам короткозамыкающими кольцами 2. Эта обмотка называется пусковой. При использовании массивных плюсов, а также в случае неявнополюсных синхронных двигателей с ротором в виде массивного стального цилиндра роль пусковой обмотки выполняет внешняя поверхность полюсов или цилиндра ротора.
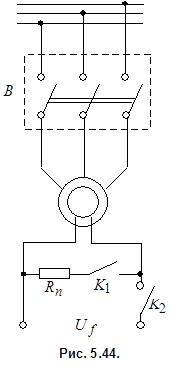
Схема асинхронного пуска представлена на рис. 5.44. В соответствии с этой схемой процесс пуска выполняется в два этапа. На первом этапе после включения обмотки статора в сеть ротор двигателя разгоняется под действием асинхронного момента до подсинхронной частоты вращения. Скольжение ротора
|
 .
.
Обмотка возбуждения в течение первого этапа пуска замыкается на активное сопротивление  . Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
. Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
|
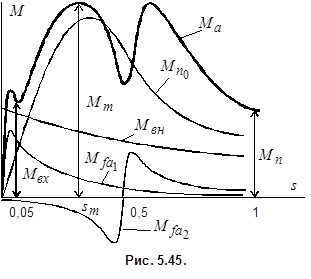
Замыкать обмотку возбуждения накоротко также нецелесообразно, так как при этом возрастают провалы в кривой асинхронного момента  (рис.5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент
(рис.5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент  , а обратно вращающаяся составляющая - момент
, а обратно вращающаяся составляющая - момент  (см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки
(см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки  в кривой результирующего момента
в кривой результирующего момента  появляются провалы в зоне малых скольжений и в области скольжения
появляются провалы в зоне малых скольжений и в области скольжения  , которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления
, которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления  позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
кратность пускового момента  ;
;
кратность максимального момента  ;
;
кратность входного момента  .
.
Входной момент определяется при скольжении  , примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя
, примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя  должен быть меньше развиваемого двигателем асинхронного момента
должен быть меньше развиваемого двигателем асинхронного момента  (рис. 5.45). Разность моментов и определяет динамический момент
(рис. 5.45). Разность моментов и определяет динамический момент
 .
.
Чем больше динамический момент, тем меньше время пуска
 .
.
Если динамический момент мал, то пуск затягивается. Это может привести к перегреву обмотки статора и пусковой обмотки из-за значительных токов, протекающих по этим обмоткам при асинхронном пуске. Пусковой ток статорной обмотки (при  ) в несколько раз превышает номинальный ток и обычно составляет
) в несколько раз превышает номинальный ток и обычно составляет
 .
.
Второй этап пуска начинается, когда ротор достигнет установившейся частоты вращения (  ), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент
), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент  , зависящий от тока возбуждения
, зависящий от тока возбуждения  и угла q,
и угла q,
 .
.
|
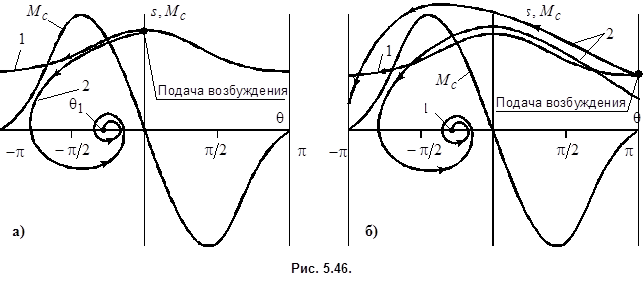
На рис. 5.46 представлены зависимости момента и скольжения s для разных моментов включения возбуждения.
При отсутствии возбуждения скольжение в установившемся асинхронном режиме изменяется по кривой 1. Ее нелинейный характер объясняется магнитной несимметрией ротора по осям d и q (для неявнополюсного двигателя скольжение постоянно и не зависит от положения ротора).
При подаче возбуждения в момент  (рис. 5.46, а) синхронный момент
(рис. 5.46, а) синхронный момент  положителен и, складываясь с асинхронным моментом
положителен и, складываясь с асинхронным моментом  , приводит к уменьшению скольжения (кривая 2). Ротор достигает синхронной частоты вращения и после нескольких качаний выходит на установившийся режим (
, приводит к уменьшению скольжения (кривая 2). Ротор достигает синхронной частоты вращения и после нескольких качаний выходит на установившийся режим (  ,
,  ).
).
При подаче возбуждения в момент  (рис. 5.46, б) возникающий синхронный момент будет действовать против направления вращения ротора. Поэтому скольжение ротора на интервале, когда момент
(рис. 5.46, б) возникающий синхронный момент будет действовать против направления вращения ротора. Поэтому скольжение ротора на интервале, когда момент  , возрастает (кривая 2), и условия для синхронизации на интервале положительного момента (
, возрастает (кривая 2), и условия для синхронизации на интервале положительного момента (  ) ухудшаются. Ротор достигает синхронной частоты вращения после одного или нескольких проворотов, а при неблагоприятных условиях синхронизация двигателя может оказаться невозможной.
) ухудшаются. Ротор достигает синхронной частоты вращения после одного или нескольких проворотов, а при неблагоприятных условиях синхронизация двигателя может оказаться невозможной.
|
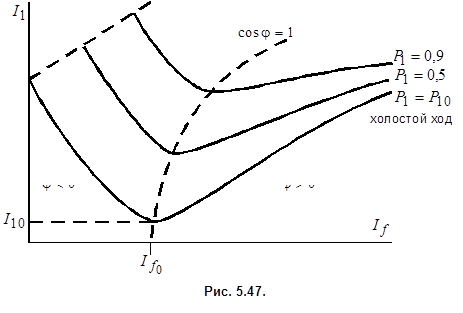
Рабочие свойства синхронных двигателей могут быть исследованы с помощью уравнений и векторных диаграмм, полученных для синхронных генераторов (см. п. 5.11 и 5.12). Основным режимом синхронных двигателей является режим при  . Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода
. Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода  , когда для своей работы двигатель потребляет из сети активный ток
, когда для своей работы двигатель потребляет из сети активный ток  .
.
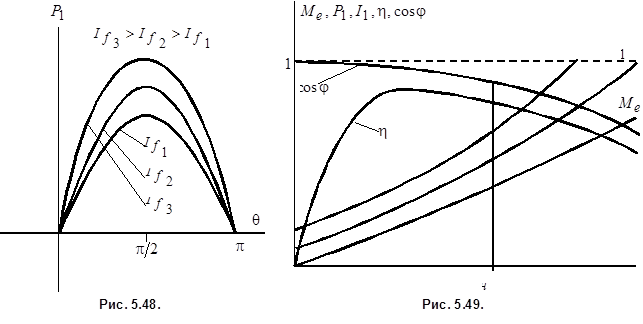
Другим характерным режимом является работа двигателя при постоянном возбуждении (  ) и переменной нагрузке (
) и переменной нагрузке (  ). Характеристиками этого режима являются угловые (рис. 5.48) и рабочие характеристики (рис. 5.49).
). Характеристиками этого режима являются угловые (рис. 5.48) и рабочие характеристики (рис. 5.49).
Угловые характеристики построены без учета знака угла и мощности для трех значений тока возбуждения. Они показывают, что синхронные двигатели допускают регулирование максимального момента. Это имеет очень важное значение в аварийных режимах для сохранения устойчивости параллельной работы двигателя с сетью.
|
Рабочие характеристики (рис. 5.49) построены при токе возбуждения  (рис. 5.47). С ростом нагрузки
(рис. 5.47). С ростом нагрузки  падает, двигатель переходит в режим потребления реактивной мощности (
падает, двигатель переходит в режим потребления реактивной мощности (  ). При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
). При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
Синхронные двигатели обычно проектируются для работы в режиме перевозбуждения (  ) с коэффициентом мощности
) с коэффициентом мощности  . Это позволяет уменьшить реактивную мощность синхронных генераторов на электростанциях и тем самым уменьшить потери в линиях электропередачи. Однако в сравнении с асинхронными двигателями синхронные двигатели являются более дорогими, главным образом, из-за затрат, связанных с изготовлением системы возбуждения. Синхронные двигатели также сложнее асинхронных в конструктивном отношении, нуждаются в квалифицированном обслуживании и менее надежны в эксплуатации.
. Это позволяет уменьшить реактивную мощность синхронных генераторов на электростанциях и тем самым уменьшить потери в линиях электропередачи. Однако в сравнении с асинхронными двигателями синхронные двигатели являются более дорогими, главным образом, из-за затрат, связанных с изготовлением системы возбуждения. Синхронные двигатели также сложнее асинхронных в конструктивном отношении, нуждаются в квалифицированном обслуживании и менее надежны в эксплуатации.
Выбор того или иного типа двигателя осуществляется на основе технико-экономических расчетов. При мощности 100-200 кВт синхронные двигатели часто оказываются выгоднее асинхронных.
Дата добавления: 2017-11-21; просмотров: 2720;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
