Качания и динамическая устойчивость синхронной машины
При работе синхронной машины параллельно с сетью ротор независимо от нагрузки вращается с постоянной частотой, но положение ротора относительно поля статора зависит от величины нагрузки. Это положение характеризуется углом q между вектором ЭДС  и отрицательным направлением вектора напряжения сети
и отрицательным направлением вектора напряжения сети  (рис. 5.33). Любое изменение факторов, влияющих на нагрузку (напряжения сети
(рис. 5.33). Любое изменение факторов, влияющих на нагрузку (напряжения сети  , тока возбуждения
, тока возбуждения  или внешнего момента
или внешнего момента  ) приводит к изменению положения ротора. Новое значение угла q устанавливается после переходного процесса, имеющего колебательный характер. Поскольку вектор напряжения сети вращается с постоянной угловой скоростью
) приводит к изменению положения ротора. Новое значение угла q устанавливается после переходного процесса, имеющего колебательный характер. Поскольку вектор напряжения сети вращается с постоянной угловой скоростью  , соответствующей частоте сети
, соответствующей частоте сети  , то колебания угла q происходят в результате механических качаний ротора относительно синхронной скорости.
, то колебания угла q происходят в результате механических качаний ротора относительно синхронной скорости.
Рассмотрим характер качаний ротора, вызванных малым изменением внешнего момента
 .
.
Движение ротора описывается дифференциальными уравнениями
При качаниях ротора электромагнитный момент  представляет собой сумму синхронного
представляет собой сумму синхронного  и асинхронного
и асинхронного  моментов,
моментов,
 .
.
Синхронный момент является нелинейной функцией угла q (рис. 5.39), а асинхронный момент является нелинейной функцией скольжения  (рис. 4.11). Используя линеаризацию этих нелинейных функций с помощью соотношений
(рис. 4.11). Используя линеаризацию этих нелинейных функций с помощью соотношений
 ;
;
и учитывая, что  , преобразуем уравнения движения ротора к виду
, преобразуем уравнения движения ротора к виду
 .
.
Решение этого уравнения известно:
 ,
,
где  ,
,  - постоянные интегрирования;
- постоянные интегрирования;  ,
,  - корни характеристического уравнения
- корни характеристического уравнения
 ,
,
 .
.
Подкоренное выражение определяет собственную частоту колебаний ротора:
|
 ,
,
а первое слагаемое характеризует коэффициент затухания качаний  . При корнях
. При корнях  решение дифференциального уравнения движения ротора можно записать в виде
решение дифференциального уравнения движения ротора можно записать в виде
 ,
,
где  .
.
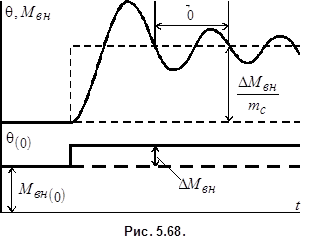
На рис. 5.68 показан характер движения ротора при малом изменении внешнего момента. Период собственных колебаний ротора составляет  , а время затухания
, а время затухания  .
.
При уменьшении коэффициента демпфирования D частота собственных колебаний ротора возрастает и возрастает время переходного процесса  . При больших коэффициентах демпфирования D (жесткая механическая характеристика) или малых коэффициентах синхронизирующего момента
. При больших коэффициентах демпфирования D (жесткая механическая характеристика) или малых коэффициентах синхронизирующего момента  (работа вблизи предела статической устойчивости), когда
(работа вблизи предела статической устойчивости), когда
 ,
,
корни характеристического уравнения и получаются действительными, поэтому переходный процесс имеет апериодический характер.
В условиях эксплуатации синхронных машин наряду с малыми возмущениями происходят и большие возмущения (внезапные короткие замыкания, отключение линии, включение значительной нагрузки и т. п.), при которых изменение угла q может достигать опасных значений по условию устойчивости параллельной работы синхронной машины с сетью. Способность синхронной машины оставаться в синхронизме при больших возмущениях называется динамической устойчивостью.
|
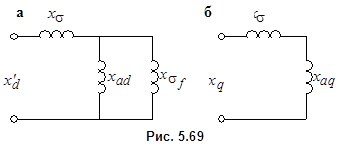
Наиболее простым методом исследования динамической устойчивости является метод площадей. В основе метода лежит угловая характеристика синхронной машины в переходном режиме  . Так как качания ротора происходят сравнительно медленно, то сверхпереходными и апериодическими токами статора пренебрегают, а расчет периодических токов статора по осям d и q выполняют с помощью схем замещения (рис. 5.69).
. Так как качания ротора происходят сравнительно медленно, то сверхпереходными и апериодическими токами статора пренебрегают, а расчет периодических токов статора по осям d и q выполняют с помощью схем замещения (рис. 5.69).
Согласно схеме рис.5.69, а сопротивление синхронной машины по оси d в переходном режиме меняется с  на
на  , поэтому уравнение напряжений преобразуется к виду
, поэтому уравнение напряжений преобразуется к виду
 ,
,
где  .
.
Соответствующим образом изменяется и уравнение угловой характеристики
 .
.
Так как  , то в отличие от статической характеристики максимум этой кривой смещается в сторону углов
, то в отличие от статической характеристики максимум этой кривой смещается в сторону углов  .
.
Рассмотрим переходный процесс в синхронном генераторе при снижении напряжения сети  , вызванном удаленным коротким замыканием. Пусть до аварии генератор работал с некоторой нагрузкой
, вызванном удаленным коротким замыканием. Пусть до аварии генератор работал с некоторой нагрузкой  . Угол нагрузки
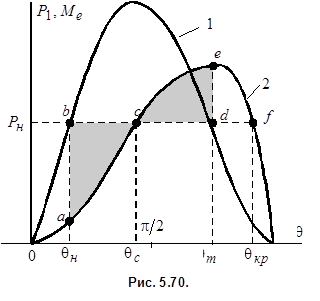
. Угол нагрузки  определяется по угловой характеристике статического режима (рис. 5.70, кривая 1). В результате аварии напряжение сети снижается и угловая характеристика приобретает вид, представленный на рис. 5.70, кривая 2.
определяется по угловой характеристике статического режима (рис. 5.70, кривая 1). В результате аварии напряжение сети снижается и угловая характеристика приобретает вид, представленный на рис. 5.70, кривая 2.
Аналогичным образом изменяется и электромагнитный момент генератора
|
 .
.
В исходном режиме электромагнитный момент был равен внешнему,
 .
.
В первый момент аварийного режима электромагнитный момент снижается до величины, соответствующей точке «а» на кривой 2 (рис. 5.70). Поэтому возникнет положительный динамический момент
 ,
,
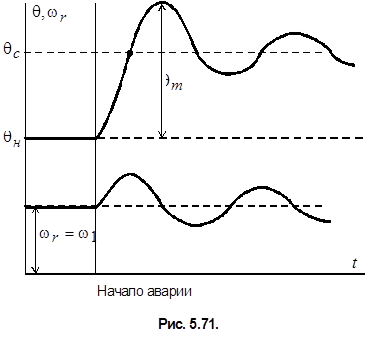
под действием которого ротор ускоряется (рис. 5.71). Процесс ускорения ротора будет происходить до тех пор, пока угол q не достигнет величины  . Во время ускорения кинетическая энергия ротора возрастет на величину
. Во время ускорения кинетическая энергия ротора возрастет на величину
 .
.
|
На рис. 5.70 энергия ускорения  равна площади треугольника «abc»,
равна площади треугольника «abc»,
 ,
,
где  - площадка ускорения.
- площадка ускорения.
В точке «с» внешний и электромагнитный моменты равны, но не равны угловые скорости вращения ротора  и поля
и поля  , поэтому в силу инерции ротора угол q будет продолжать увеличиваться. При этом электромагнитный момент превысит внешний
, поэтому в силу инерции ротора угол q будет продолжать увеличиваться. При этом электромагнитный момент превысит внешний  , и в сеть будет поступать больше мощности, чем развивает турбина,
, и в сеть будет поступать больше мощности, чем развивает турбина,
 ,
,
поэтому ротор начнет тормозиться.
Этот процесс будет продолжаться до тех пор, пока не израсходуется запасенная кинетическая энергия . Угловая скорость ротора вновь станет синхронной, а угол q достигнет максимального значения  . Величина определяется из условия
. Величина определяется из условия
 ,
,
где  - площадь торможения.
- площадь торможения.
|
Если максимально возможная площадь торможения  будет меньше
будет меньше  , то угол q превысит критическое значение
, то угол q превысит критическое значение  . Электромагнитный момент станет ниже . Ротор, не достигнув синхронной скорости, вновь начнет ускоряться, и генератор выпадет из синхронизма. Таким образом, условие
. Электромагнитный момент станет ниже . Ротор, не достигнув синхронной скорости, вновь начнет ускоряться, и генератор выпадет из синхронизма. Таким образом, условие

является критерием динамической устойчивости. Отношение  характеризует запас динамической устойчивости: чем меньше площадка ускорения и больше площадка торможения , тем выше запас динамической устойчивости.
характеризует запас динамической устойчивости: чем меньше площадка ускорения и больше площадка торможения , тем выше запас динамической устойчивости.
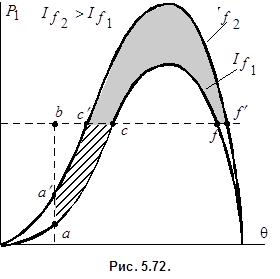
На динамическую устойчивость синхронной машины большое влияние оказывает регулирование возбуждения (рис. 5.72). При увеличении тока возбуждения площадка ускорения уменьшается на величину  , а площадка торможения возрастает на величину
, а площадка торможения возрастает на величину  . При больших возмущениях регулирование возбуждения выполняется в форме форсировки (подачи на обмотку возбуждения максимального напряжения возбуждения
. При больших возмущениях регулирование возбуждения выполняется в форме форсировки (подачи на обмотку возбуждения максимального напряжения возбуждения
 ,
,
где  - кратность форсировки). Эффективность форсировки тем выше, чем больше кратность форсировки и чем выше быстродействие возбудителя. Кратность форсировки современных возбудителей составляет 2¸2,5, а быстродействие зависит от типа возбудителя.
- кратность форсировки). Эффективность форсировки тем выше, чем больше кратность форсировки и чем выше быстродействие возбудителя. Кратность форсировки современных возбудителей составляет 2¸2,5, а быстродействие зависит от типа возбудителя.
Наибольшее быстродействие имеют тиристорные возбудители, питающиеся от независимого источника. Наиболее инерционными являются возбудители, выполненные на основе машины постоянного тока (электромашинные возбудители).
Дата добавления: 2017-11-21; просмотров: 2483;
Поиск по сайту
Узнать еще
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- II. Принцип действия и режимы работы синхронной машины
- R - полная аэродинамическая сила; Y - подъемная сила; X- сила лобового сопротивления; a- угол атаки;q- угол качества
- XXXV. ПОДЪЕМНЫЕ МАШИНЫ И ПРОХОДЧЕСКИЕ ЛЕБЕДКИ
- Абсолютная устойчивость нелинейных систем в случае, когда W(p) не является рациональной функцией.
- Абсорбционные холодильные машины
- АВАРИЙНО-СПАСАТЕЛЬНЫЕ МАШИНЫ (АСМ).
- Агрегативная устойчивость растворов ВМС и ее нарушение

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
