С машинами двойного питания в асинхронном режиме.
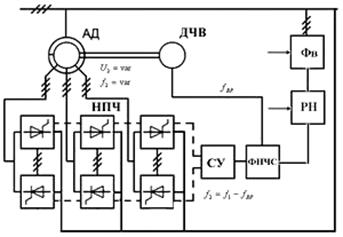 рис.53
рис.53
где ДЧВ – датчик частоты вращения (по скорости ротора);
Фв – фазовращатель;
РН – регулятор напряжения;
ФНЧС – формирователь напряжения и частоты вращения;
СУ – система управления.
На одном валу с асинхронной машиной (МДП) установлен датчик частоты вращения, который представляет из себя тахометр с возбуждением от постоянных магнитов и числом полюсов равным числу полюсов асинхронной машины. ДЧВ одновременно служит датчиком углового положения ротора. На входе блока ФНЧС подаются сигналы:
1. с частотой питающей сети  через блоки Фв и РН, которые соответственно изменяют начальную фазу φ2 со стороны питания ротора и его амплитуды.
через блоки Фв и РН, которые соответственно изменяют начальную фазу φ2 со стороны питания ротора и его амплитуды.
2. подается от ДЧВ с частотой  . На входе блока ФНЧС формируется синусоидальное напряжение частота которого
. На входе блока ФНЧС формируется синусоидальное напряжение частота которого  т.е.
т.е.  которая в свою очередь зависит от механической нагрузки на валу двигателя.
которая в свою очередь зависит от механической нагрузки на валу двигателя.
Регулирование угловой скорости МДП в этом режиме осуществляется при отсутствии воздействия регулирующего ток на  , изменение фазу с помощью ФВ и амплитуды с помощью РН. Благодаря введению обратной связи по положению ротора с помощью ДЧВ устойчивость работы электропривода будет определятся характером изменения скольжения.
, изменение фазу с помощью ФВ и амплитуды с помощью РН. Благодаря введению обратной связи по положению ротора с помощью ДЧВ устойчивость работы электропривода будет определятся характером изменения скольжения.
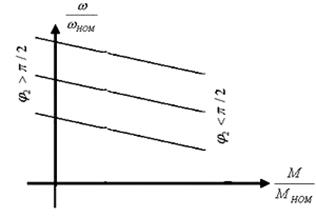
рис.54
Так же как и в асинхронном режиме в асинхронном режиме МДП может работать в двигательном режиме с ω больше и меньше синхронной, в генераторном режиме с ω больше и меньше синхронной.
Д регулирования в приводах с МДП ≈ 3:1 при расширении диапазона существенным образом увеличивается установленная мощность системы.
Достоинства:
· Регулирование плавное;
· Экономичность(за счет полезного использования энергии скольжения);
· Характеристики жесткие;
· Стабильность высокая (автономное регулирование U и φ ротора);
· Высокий cosφ.
При двухзвенном регулировании ротор долен иметь повышенную механическую прочность.
Недостатки: Дороговизна.
При выборе мощности для такого электропривода необходимо учитывать также возможность регулирования реактивной мощности со стороны статора. Режим полной компенсации реактивной мощности со стороны статора требует увеличения номинального тока ротора т.е. увеличения габаритов серийно выпускаемой машины. Для двигателей мощностью 1000÷5000 МВт приведет к увеличение габаритов 2÷5 % соответственно.
Дата добавления: 2017-11-21; просмотров: 1277;
Поиск по сайту
Узнать еще
- II. Основные задачи службы торговли и питания
- IV. Обязанности и права штаба службы торговли и питания района
- VI. Подготовка кадров службы торговли и питания ГО района
- Анализ опасности прикосновения к токоведущим частям в сетях с глухозаземленной нейтралью при аварийном режиме.
- Анализ опасности прикосновения к токоведущим частям в сетях с глухозаземленной нейтралью при нормальном режиме.
- Анализ опасности прикосновения к токоведущим частям в сетях с изолированной нейтралью при аварийном режиме.
- Анализ опасности прикосновения к токоведущим частям в сетях с изолированной нейтралью при нормальном режиме.
- Анализ построения системы электропитания и заземления ОТСС

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
