Синтез БИХ-фильтров на основе аналого-цифровой трансформации
Сравнение БИХ-фильтров с КИХ-фильтрами показывает, что для получения примерно одинаковых частотно-избирательных свойств (имеется в виду крутизна спада АЧХ) КИХ-фильтр должен иметь в 10…20 раз более высокий порядок. Это вполне объяснимо, так как известно, что быстро изменяющиеся сигналы имеют широкий спектр, а благодаря двойственности (дуализму) времени и частоты отсюда следует, что круто изменяющейся функции частоты (АЧХ) должна соответствовать функция времени (импульсная характеристика) большой длительности. Но для КИХ-фильтра порядок – это количество отсчетов импульсной характеристики минус 1, в то время как БИХ-фильтр даже первого порядка имеет импульсную характеристику бесконечной длительности. Таким образом, в тех случаях, когда вид фазочастотной характеристики не играет определяющей роли для практического применения разрабатываемого фильтра, следует использовать БИХ-фильтр, так как при этом получается существенный выигрыш в быстродействии (или в аппаратурных затратах на реализацию) фильтра. То обстоятельство, что не всякий БИХ-фильтр оказывается устойчивым, не представляет такой заметной опасности, как может показаться на первый взгляд. Во-первых, устойчивость может быть проверена (и обеспечена) на этапе проектирования цифрового фильтра; во-вторых, характеристики цифровых фильтров не подвержены дрейфу с течением времени и при изменении внешних условий, следовательно, устойчивый фильтр останется устойчивым в течение всего времени работы (конечно, нужно учитывать возможность выхода аппаратуры из строя в результате катастрофического отказа; при этом может возникнуть неустойчивость). Следует также отметить, что в цифровых БИХ-фильтрах могут возникать незатухающие паразитные колебания (так называемые предельные циклы) вследствие своеобразного нарушения устойчивости при округлении дробных чисел; подробнее см. [7].
Наиболее широко применяются методы синтеза цифровых БИХ-фильтров, основанные на так называемой аналого-цифровой трансформации, т.е. на преобразовании аналогового фильтра с требуемыми характеристиками в цифровой (дискретный) фильтр.
Это объясняется, во-первых, трудностью решения задачи прямой аппроксимации желаемых характеристик дробно-рациональными передаточными функциями и, во-вторых, наличием развитой теории синтеза аналоговых фильтров и простотой преобразования аналоговых фильтров-прототипов в дискретные фильтры.
В качестве фильтров-прототипов наиболее часто применяются аналоговые фильтры Баттерворта, Чебышева, Золотарева-Кауэра (эллиптические) и Бесселя. Фильтры Баттерворта имеют при заданном порядке максимально гладкую АЧХ. Фильтры Чебышева имеют АЧХ, пульсирующую в полосе пропускания (фильтры I рода) или в полосе заграждения (фильтры II рода). АЧХ эллиптического фильтра пульсирует как в полосе пропускания, так и в полосе заграждения и поэтому имеет максимальную крутизну спада.
Все перечисленные фильтры характеризуются заметной нелинейностью фазочастотной характеристики. Фильтр Бесселя имеет ФЧХ, близкую к линейной в полосе пропускания.
Аналоговые фильтры принято описывать передаточными функциями, которые связаны с импульсными характеристиками преобразованием Лапласа [8]. Преобразование Лапласа связывает аналоговый сигнал x(t) с его образом (изображением) в виде функции X(p) комплексного переменного p. Мнимая ось комплексной p-плоскости представляет собой ось частот в описании аналогового сигнала. Аналогичную роль в описании дискретных сигналов играет единичная окружность z-плоскости.
Аналого-цифровая трансформация состоит в установлении связи комплексных переменных p и z. Выразив p в виде функции p = f(z) и подставив в выражение передаточной функции Ha(p) аналогового фильтра-прототипа, мы получили бы функцию комплексного переменного z, имеющую смысл передаточной функции H(z) дискретного фильтра. Трудность состоит в том, что, во-первых, мнимая ось p-плоскости имеет бесконечную, а единичная окружность z-плоскости – конечную длину 2π. Во-вторых, реализуемы только ЛИС-цепи конечного порядка, поэтому подстановка p = f(z) в дробно-рациональную функцию Ha(p) должна давать также дробно-рациональную функцию.
Поскольку на единичной окружности z = ejω, а при дискретизации должно обеспечиваться равенство ω = ΩTd, связь комплексных переменных p и z, обусловленная дискретизацией аналоговых сигналов, описывается выражениями
z = exp(pTd) (13.4)
и
p = ln z / Td , (13.5)
которые не являются дробно-рациональными. Различные способы преодоления этой трудности лежат в основе двух рассмотренных ниже методов аналого-цифровой трансформации.
Метод инвариантности импульсной характеристики.
Передаточная функция произвольного аналогового фильтра (с сосредоточенными параметрами) имеет вид дробно-рациональной функции комплексного переменного p. Такая функция может быть представлена в виде суммы дробей
где pk, 1 ≤ k ≤ N – полюсы передаточной функции, а коэффициенты Ak определяются из условия равенства числителя передаточной функции Ha(p) и числителя правой части после приведения ее к общему знаменателю. (Здесь мы рассматриваем лишь практически важный случай, когда степень числителя Ha(p) меньше степени знаменателя, а все корни знаменателя некратные.)
Ввиду линейности преобразования Лапласа импульсная характеристика такого фильтра имеет вид суммы экспоненциальных функций непрерывного времени  σ(t) – функция Хевисайда.
σ(t) – функция Хевисайда.
Очевидно, для того чтобы импульсная характеристика затухала со временем (т. е. фильтр был устойчивым), необходимо и достаточно, чтобы все полюсы были расположены в p-плоскости слева от мнимой оси.
Метод аналого-цифровой трансформации, известный под названием метода инвариантности импульсной характеристики, основан на прямом применении теоремы отсчетов (теоремы Котельникова). Рассматривая импульсную характеристику аналогового фильтра-прототипа как функцию времени (сигнал), можно заменить ее последовательностью отсчетов, выбранных с достаточно малым шагом дискретизации Td.
Результатом дискретизации импульсной характеристики аналогового фильтра будет последовательность
 ,
,
где rk = exp(pkTd) – полюсы передаточной функции цифрового фильтра, u[n] который 
Из полученного выражения видно, что при дискретизации импульсной характеристики каузального аналогового фильтра с дробно-рациональной передаточной функцией получается сумма каузальных экспоненциальных последовательностей, следовательно, реализуемому аналоговому фильтру соответствует реализуемый цифровой фильтр. Кроме того, полюсы цифрового фильтра связаны с полюсами фильтра-прототипа соотношением rk = exp(pkTd), 1 ≤ k ≤ N, поэтому устойчивому аналоговому фильтру (Re{pk} < 0) соответствует устойчивый цифровой фильтр того же порядка N (так как |rk| = |exp(pkTd)|< 1). Зная полюсы цифрового фильтра, можно сразу записать его передаточную функцию
и на этом аналого-цифровая трансформация заканчивается, так как, зная передаточную функцию, легко составить структурную схему и разностное уравнение цифрового фильтра.
Поскольку импульсная характеристика цифрового фильтра есть продукт дискретизации импульсной характеристики аналогового фильтра, КЧХ цифрового фильтра связана с КЧХ аналогового фильтра соотношением
 , (13.6)
, (13.6)
где Ωd = 2π/Td – частота дискретизации. Очевидно, если КЧХ прототипа не финитна, а это всегда так для фильтров конечного порядка, то неизбежно наложение (суммирование) «хвостов» сдвинутых копий Ha(•), и, как следствие, искажение формы получаемой КЧХ дискретного фильтра по отношению к КЧХ фильтра-прототипа. Этот эффект ограничивает практическое применение метода инвариантности импульсной характеристики в основном задачами синтеза цифровых фильтров нижних частот.
Метод билинейного преобразования основан на аппроксимации выражения (13.5), позволяющей сохранить дробную рациональность передаточной функции. Подставив разложение функции логарифма в ряд, ограниченное первым слагаемым, получим
 ,
,
или
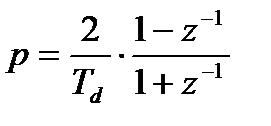 . (13.7)
. (13.7)
Это выражение дробно-рационально относительно z-1 поэтому после его подстановки в дробно-рациональную передаточную функцию Ha(p) аналогового прототипа получается снова дробно-рациональная, а следовательно, реализуемая передаточная функция H(z) цифрового фильтра.
Выясним, как располагаются в z-плоскости полюсы передаточной функции H(z), если полюсы передаточной функции прототипа Ha(p) находятся в левой части комплексной плоскости (иными словами, является ли устойчивым цифровой фильтр, если устойчив фильтр-прототип).
Выразим на основе (13.7) комплексное переменное z через p:
z-1pTd + pTd = 2 - 2 z-1;
отсюда
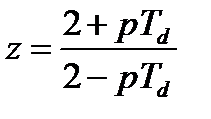 . (13.8)
. (13.8)
Чтобы выяснить, в какое множество z-плоскости отображается мнимая ось p-плоскости (ось частоты), подставим в это выражение jΩ вместо p, тогда получим выражение для образа мнимой оси p-плоскости при отображении, описываемом выражением (13.8):
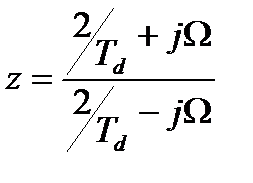 .
.
Числитель и знаменатель этой дроби суть комплексно-сопряженные числа, поэтому модуль дроби равен единице при всех Ω. Это означает, что мнимая ось p-плоскости отображается преобразованием (13.8) на единичную окружность z-плоскости. Но переменная Ω – это частота, соответствующая описанию аналогового фильтра; роль частотной оси для цифровых цепей играет единичная окружность на z -плоскости (множество точек ejω при значениях ω, принимающих значения из интервала от -π до π). Заменяя z на ejω, получим
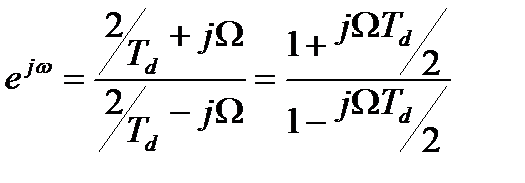 .
.
Тогда
следовательно, связь «аналоговой» и «цифровой» частот при билинейном преобразовании описывается выражениями
ω/2 = argtg(ΩTd/2),
ΩTd/2 = tg ω/2. (13.9)
Поскольку π ≤ ω ≤ -π, а -∞ < Ω < ∞, нетрудно видеть, что вся аналоговая частотная ось (бесконечной длины) отображается на единичную окружность (длины 2π), причем это отображение однократно в отличие от (13.6), и вследствие этого различные участки оси Ω испытывают различное «сжатие» при отображении на ось ω (единичную окружность). Это необходимо учитывать при проектировании цифровых фильтров на этапе определения требований к частотам среза фильтров-прототипов.
Заслуживает внимания вопрос, насколько вредна нелинейная трансформация частотной оси с точки зрения задачи синтеза цифровых фильтров. Очевидно, что при проектировании фильтров с желаемыми АЧХ кусочно-постоянного вида указанная нелинейность трансформации частотной оси не влияет на качество цифрового фильтра, так как приводит лишь к необходимости на этапе построения аналогового фильтра-прототипа учитывать последующее изменение характерных частот фильтра (граничных частот) при билинейном преобразовании. Если же требуется построить фильтр, не являющийся типовым (ФНЧ, ФВЧ, полосовым или режекторным), то в общем случае нелинейность отображения частотной оси приводит к искажению формы АЧХ. Например, интегрирующий аналоговый фильтр имеет амплитудно-частотную характеристику гиперболического вида ~1/ Ω и при билинейном преобразовании не приводит к интегрирующему цифровому фильтру.
Для того чтобы устойчивый аналоговый фильтр трансформировался в устойчивый же цифровой фильтр, требуется, чтобы при билинейном преобразовании левая полуплоскость p-плоскости отображалась внутрь единичной окружности. Разлагая p на мнимую и вещественную части, получим для билинейного преобразования (13.8)
Поскольку мнимые части числителя и знаменателя одинаковы, модуль дроби будет меньше 1, если Re(pTd) < 0. Тогда любой полюс функции Ha(p), лежащий слева от мнимой оси, отображается в полюс функции H(z), расположенный внутри единичной окружности. Это означает, что устойчивый аналоговый фильтр трансформируется преобразованием (13.7) в устойчивый дискретный фильтр.
Итак, установлено, что билинейное преобразование трансформирует устойчивый реализуемый аналоговый фильтр в устойчивый реализуемый цифровой фильтр. При этом вследствие однократности отображения частотной оси на единичной окружность отсутствует наложение «хвостов» КЧХ, что является достоинством билинейного преобразования. К недостаткам следует отнести то, что не сохраняются ни импульсная, ни фазочастотная характеристики фильтра (точнее говоря, импульсная и фазочастотная характеристики дискретного фильтра могут сильно отличаться по форме от соответствующих характеристик прототипа).
Порядок расчета цифрового фильтра методом билинейного преобразования состоит в следующем:
1) определение характерных частот ЦФ и пересчет их в частоты аналогового фильтра в соответствии с (13.9);
2) синтез аналогового фильтра, удовлетворяющего заданным условиям;
3) подстановка формулы (13.7) билинейного преобразования в выражение Ha(p) передаточной функции фильтра-прототипа.
Реализация цифровых фильтров (и других алгоритмов цифровой обработки сигналов) возможна на различной элементной базе.
Выбор конкретного воплощения алгоритма ЦОС производится разработчиком с учетом различных показателей, к которым относятся стоимость, массогабаритные характеристики, энергопотребление, быстродействие и т.п. В каждом конкретном случае один или несколько показателей играют наиболее важную роль в выборе способа реализации. Например, в системах подвижной радиосвязи главными показателями являются быстродействие (обработка должна выполняться в реальном времени) и массогабаритные характеристики, при этом желательно обеспечить малое энергопотребление и умеренную цену мобильной станции. Устройство обработки сигналов в таких системах работает по жестким алгоритмам, которые не изменяются в течение всего срока эксплуатации изделия; точность представления данных (разрядность) должна быть достаточна для обеспечения комфортности восприятия речи (разборчивости и возможности узнавания собеседника) и является поэтому сравнительно невысокой. В системах обработки геофизической информации, напротив, обработка в реальном времени не требуется, массогабаритные характеристики не играют доминирующей роли, однако на передний план выступают точность представления данных и гибкость реализуемых алгоритмов.
Поэтому в таких системах обработка сигналов реализуется обычно на универсальных цифровых вычислительных машинах. В системах реального времени (например, в подвижной радиосвязи), когда на обработку отсчета сигнала отводится временной интервал, равный шагу дискретизации, как правило, используются специализированные цифровые устройства, называемые цифровыми сигнальными процессорами (ЦСП). Следует отметить, что в последнее время в устройствах цифровой обработки сигналов широкое распространение получили программируемые логические интегральные схемы (ПЛИС). ПЛИС представляет собой интегральную схему сверхвысокой степени интеграции, содержащую на кристалле порядка 1 миллиона логических вентилей, которые могут быть программным путем соединены в логическую структуру, реализующую заданный алгоритм цифровой обработки сигналов аппаратным способом. Таким образом, ПЛИС сочетают в себе преимущества аппаратной реализации алгоритмов (главное из которых – быстродействие) с достоинствами программируемых устройств.
КАНАЛЫ СВЯЗИ
Дата добавления: 2017-10-04; просмотров: 3295;
Поиск по сайту
Узнать еще
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- III. Биосинтез крахмала и гликогена.
- Iii. строение, биосинтез и биологическое действие гормонов
- VII. Педагогические технологии на основе дидактического усовершенствования и реконструирования материала
- А) Существительные с неподвижным ударением на основе.
- А. Однофазное прикосновение в сетях с заземленной нейтралью
- Активация аминокислот при биосинтезе белка.
- Алюминий и сплавы на его основе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
