По грузоподъемности
Сверхлегкие – роботы номинальной грузоподъемностью до 1 кг;
Легкие – роботы номинальной грузоподъемностью свыше 1 до 10 кг;
Средние – роботы номинальной грузоподъемностью свыше 10 до 200 кг;
Тяжелые – роботы номинальной грузоподъемностью свыше 200 до 1000 кг;
Сверхтяжелые - роботы номинальной грузоподъемностью свыше 1000 кг.
2. По числу степеней свободы.
Роботы с двумя степенями свободы;
Роботы с тремя степенями свободы;
Роботы с четырьмя степенями свободы;
Роботы со степенями свободы более четырех.
Малая подвижность (до 3-х степеней свободы) встречается в основном у специальных и, реже, у специализированных ПР. Средняя подвижность (до 6-ти степеней) характерна для специализированных и универсальных ПР. Редко применяются ПР с высокой подвижностью (свыше шести степеней), т.к. это приводит к усложнению работы и системы программирования.
3. По возможности передвижения ПР подразделяются на стационарные и подвижные.
4. По способу установки на рабочем месте ПР подразделяются на напольные, подвесные и встроенные.
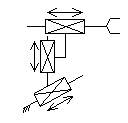
5. По виду систем координат ПР подразделяются на группы указанные в таблице.
| ГРУППА | Пример структурной кинематической схемы |
| Роботы, работающие в прямоугольной декартовой системе координат. |
|
| Роботы, работающие в цилиндрической системе координат. | 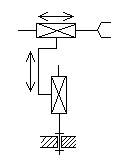
|
| Роботы, работающие в сферической системе координат. | 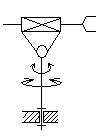
|
| Роботы, работающие в угловой системе координат. | 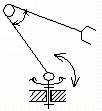
|
| Роботы, работающие в другой системе координат. |
6. По виду привода ПР подразделяются на
Роботы с электрическим приводом;
Роботы с гидравлическим приводом;
Роботы с пневматическим приводом;
Роботы с комбинированным приводом.
Системы приводов существенно влияют на технологические возможности ПР. Наиболее распространенны пневмоприводы, для которых характерна простота и дешевизна. Грузоподъемность ПР с пневмоприводом обычно не превышает 10 кг. ПР с гидроприводом отличаются широкими техническими возможностями, имеют большую грузоподъемность но небольшую быстроходность. Электропривод удобен при эксплуатации, надежен, обладает большими технологическими возможностями, но пока ограничивает создание ПР с высокой грузоподъемностью (свыше 100 кг).
7. По виду управления. ПР подразделяют на группы и подгруппы, указанные в таблице.
| Группа | Подгруппа |
| Роботы с ПУ | § С цикловым управлением § С позиционным управлением, кроме циклового управления § С контурным управлением |
| Роботы с адаптивным управлением | § С позиционным управлением § С контурным управлением |
8. По способу программирования ПР подразделяют на
§ роботы, программируемые обучением;
§ роботы, программируемые аналитически.
Дата добавления: 2019-12-09; просмотров: 719;
Поиск по сайту
Узнать еще
- Вопрос 16. Выбор грузоподъемности автопоезда.
- Вопрос 20. Выбор грузоподъемности автопоезда.
- Ограничители грузоподъемности и грузового момента
- Определение грузоподъемности танкера и проверка напряжений корпуса.
- Подбор подшипников по статической грузоподъемности
- Тормозная система грузовых автомобилей большой грузоподъемности.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
