Классификация по числу условий связей
Структура плоских механизмов
Механизм называется плоским, если все его звенья движутся параллельно одной плоскости, и траектории всех его точек – плоские кривые. В противном случае механизм пространственный.
Классификация плоских кинематических пар
Классификация по числу условий связей
Из курса теоретической механики известно, что свободное твердое тело в про- странстве имеет шесть степеней свободы (рис 1.1). 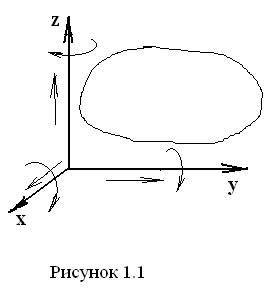 Это три поступательных движения вдоль трёх осей координат и три вращательных движения вокруг этих осей. Можно также сказать, что на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H, а
Это три поступательных движения вдоль трёх осей координат и три вращательных движения вокруг этих осей. Можно также сказать, что на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H, а
число связей буквой S, то можно записать:
Н = 6, S = 0
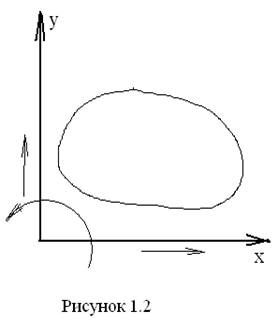
При переходе из пространственной системы в плоскую твёрдое тело теряет три степени свободы, что означает, что на него наложено три связи. Так что свободное твёрдое тело в плоскости имеет H = 3 и S = 3. Например, тело, находящееся в координатной плоскости XY, может двигаться поступательно вдоль этих осей и вращаться вокруг оси, перпендикулярной плоскости XY (рис 1.2).
В плоской кинематической паре количество ограничений в движении звена, называемых условиями связей, может быть или два, или одно.
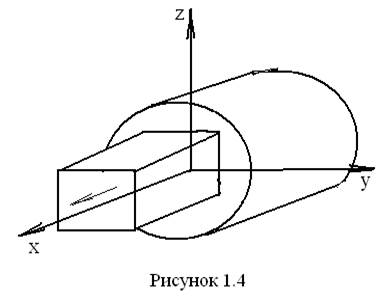
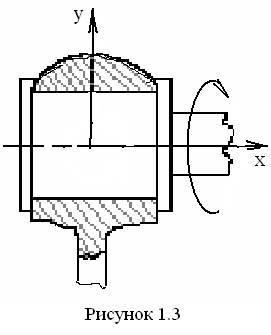
 В первом случае общее количество условий связей вместе с тремя потерянными при переходе из пространства в плоскость составляет S = 5. Такая кинематическая пара в соответствии с числом S является парой 5-го класса, а так как в ней может выполняться только одно движение (H = 1), то эта пара называется также одноподвижной кинематической парой. Кинематические пары 5-го класса могут быть вращательными (рис. 1.3) и поступательными (рис. 1.4) в зависимости от характера относительного движения звеньев, реализуемого в ней. Возможные относительные движения звеньев в этих парах на указанных рисунках отмечены стрелками.
В первом случае общее количество условий связей вместе с тремя потерянными при переходе из пространства в плоскость составляет S = 5. Такая кинематическая пара в соответствии с числом S является парой 5-го класса, а так как в ней может выполняться только одно движение (H = 1), то эта пара называется также одноподвижной кинематической парой. Кинематические пары 5-го класса могут быть вращательными (рис. 1.3) и поступательными (рис. 1.4) в зависимости от характера относительного движения звеньев, реализуемого в ней. Возможные относительные движения звеньев в этих парах на указанных рисунках отмечены стрелками.
Во втором случае общее количество условий связей S = 4, и кинематическая пара является парой 4-го класса, а в соответствии с
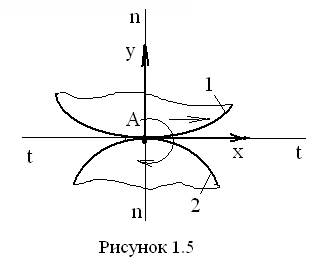
 H = 2 она называется двухподвижной кинематической парой (рис. 1.5). Как видноиз этого рисунка, пару 4-го класса в плоскости составляют две кривые 1 и 2, контактирующие друг с другом в точке A. Относительное движение звеньев этой пары возможно в направлении касательной t–t (ось X) и вращение вокруг точки A. Невозможно движение вдоль нормали n–n (ось Y).
H = 2 она называется двухподвижной кинематической парой (рис. 1.5). Как видноиз этого рисунка, пару 4-го класса в плоскости составляют две кривые 1 и 2, контактирующие друг с другом в точке A. Относительное движение звеньев этой пары возможно в направлении касательной t–t (ось X) и вращение вокруг точки A. Невозможно движение вдоль нормали n–n (ось Y).
Дата добавления: 2017-10-04; просмотров: 1360;
Поиск по сайту
Узнать еще
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- I. КЛАССИФИКАЦИЯ ПО ИСПОЛЬЗОВАНИЮ.
- I. Классификация углеводов.
- I.4. Классификация групп крови
- III.3. Классификация пород-коллекторов нефти и газа
- IV. Классификация в зависимости от локализации источника кровотечения
- IV. Классификация обязательств РК по международным договорам
- IV.3. Классификация залежей нефти и газа

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
