Архитектура программируемого таймера КР580ВИ53
Программируемый интервальный таймер КР580ВИ53 предназначен для реализации таких распространенных управляющих функций микро ЭВМ, как формирование временных интервалов, подсчет числа внешних событий, генерации сигналов переменной частоты, и т.п.


Рисунок 4.14. Структурная схема программируемого интервального таймера.
Расшифруем обозначения:
BD – буфер данных
RWCU – регистр управления записью чтением (предназначен для коммутации внутренних цепей программируемого таймера)
CT0 – CT2 – 16-разрядные вычитающие счетчики
CLK0 – CLK2 – входы синхронизации счетчиков (на них подается синхроимпульс, который считает счетчик)
GATE0 – GATE2 – входы управления счетчиков
OUT0 – OUT2 – выходные сигналы счетчиков
RGR – регистр управляющего слова
D7 – 0 – входы-выходы данных (подключаются к шине данных)
RD – строб чтения
WR – строб записи
A0 – A1 – два младших разряда шины адреса
CS – сигнал выбора, подключается к дешифратору адреса (по этому сигналу
Сигналы тактового генератора или подсчитываемые сигналы из ВУ подаются на вход счетчиков CLK0,CLK1,CLK2. Прием сигналов разрешается внешними управляющими сигналами GATE0,GATE1,GATE2 соответственно. Как только содержимое какого-либо счетчика становится равным нулю, вырабатывается один из выходных сигналов OUT0, OUT1 или OUT3, которые используются как запросы на прерывание.
Инициализация каждого счетчика производится записью управляющего слова в регистр управляющего словаRGR.
Формат управляющего слова представлен на рисунке
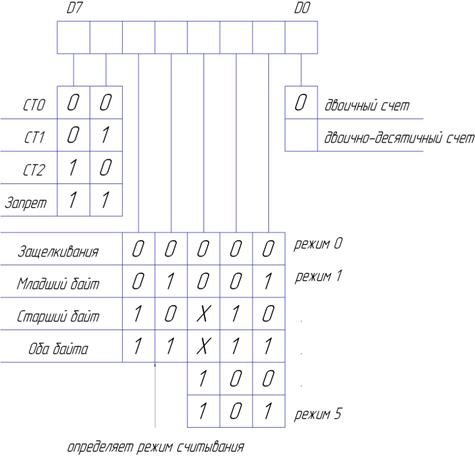
Рисунок 4.15. формат управляющего слова программируемого таймера.
При этом устанавливаются начальное значение счетчика и один из ниже следующих шести режимов его работы - условий формирования входного сигнала OUT.
Режим 0. Программируемая задержка.
При этом в счетчик загружается число N (сначала младший байт, затем старший) и при появлении сигнала GATE выдается импульс длительностью N тактов.
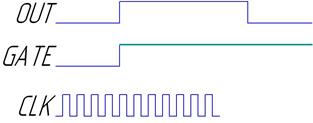
Рисунок 4.16. Временная диаграмма работы в режиме 0.
Режим 1. Программируемый ждущий мультивибратор.
Данный режим аналогичен режиму 0, но счет запускается по фронту сигнала GATE.

Рисунок 4.17. Временная диаграмма работы в режиме 1.
Режим 2.
В этом режиме таймер генерирует сигнал с частотой в N раз меньше, чем частота тактовых импульсов. При этом сигналом GATE используется как управляющий. 0 – запрещает счет. 1 – разрешает счет.
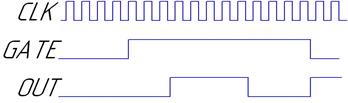
Рисунок 4.18. Временная диаграмма работы в режиме 2.
Режим 3.
Аналогичен режиму 2, но если N – нечетное, то длительность сигнала высокого уровня на один такт больше.
Режим 4. Программируемый управляемый строб.

Рисунок 4.19. Временная диаграмма работы в режиме 4.
Режим 5.

Рисунок 4.20. Временная диаграмма работы в режиме 5.
Обмен информацией между системным интерфейсом микро ЭВМ и регистрами БИС осуществляется по шине данных D7-D0 с помощью управляющих сигналов RW,WR,CS. При этом внутренние регистры БИС адресуются по линиям А0 и А1.
Считывание содержимого любого счетчика для его последующего анализа осуществляется двумя способами.
Первый - реализуется обычными командами IN, в которых указывается порт, соответствующего счетчику. Считывание содержимого счетчика осуществляется в соответствии с операцией, указанной в разрядах 4-5 управляющего слова. Недостаток этого способа заключается в том, что на время считывания необходимо прекращать работу счетчика.
Второй - "считывание на лету", не нарушает работы счетчика, но требует для своей реализации предварительной загрузки в регистр режима соответствующего управляющего слова.
Дата добавления: 2021-09-07; просмотров: 773;
Поиск по сайту
Узнать еще
- III. Архитектура Древнего Египта
- Архитектура OLAP-приложений
- АРХИТЕКТУРА «КЛИЕНТ - СЕРВЕР» АВТОМАТИЗИРОВАННОЙ ИНФОРМАЦИОННОЙ ТЕХНОЛОГИИ КАЗНАЧЕЙСТВА
- Архитектура античного мира
- Архитектура арифметического процессора
- Архитектура архаического периода.
- Архитектура Балканских и Придунайских стран VII-XV в.в.
- АРХИТЕКТУРА БАРОККО ХАРАКТЕРНЫЕ ЧЕРТЫ АРХИТЕКТУРЫ БАРОККО

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
