Вывод уравнения кинематического звена контура самонаведения
На рис. 7 приведены геометрические соотношения при наведении ракеты. При самонаведении ракеты в вертикальной плоскости относительное положение ракеты и цели характеризуется вектором дальности ракета — цель D, ориентацию в пространстве которого определяет угол  , величина и скорость изменения которого зависят как от параметров движения цели, так и от параметров движения ракеты.
, величина и скорость изменения которого зависят как от параметров движения цели, так и от параметров движения ракеты.
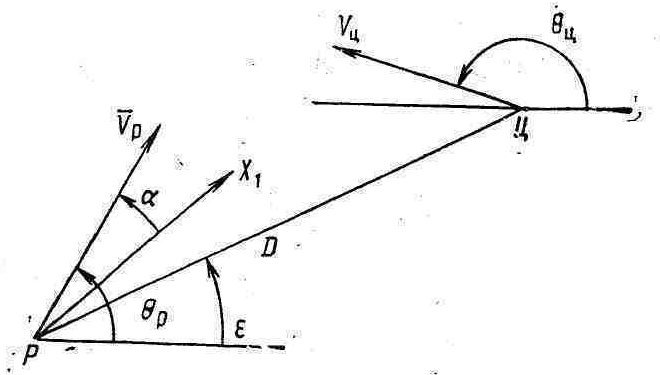
Рисунок 7 - К выводу уравнения кинематического звена контура самонаведения
Уравнения кинематики самонаведения, характеризующие скорость изменения вектора дальности и его угловую скорость вращения, имеют вид:
 ,
,
 ,
,
где  ,
,  — скорость изменения вектора дальности и угловая скорость его вращения соответственно;
— скорость изменения вектора дальности и угловая скорость его вращения соответственно;
 ,
,  — модуль и угол наклона вектора скорости цели соответственно;
— модуль и угол наклона вектора скорости цели соответственно;
 ,
,  — модуль и угол наклона вектора скорости ракеты соответственно.
— модуль и угол наклона вектора скорости ракеты соответственно.
Рассматривая условия наведения на встречных курсах, можно допустить, что
 ,
,
 ,
,
 ,
,

тогда получим:

Полученные уравнения показывают, что скорость вращения линии ракета — цель обусловливается движением цели и движением ракеты перпендикулярно этой линии, т. е.
где  ,
,  — составляющие скорости вращения линии визирования ракета — цель (вектора
— составляющие скорости вращения линии визирования ракета — цель (вектора  ), обусловленные соответственно движением цели и ракеты.
), обусловленные соответственно движением цели и ракеты.
Учитывая, что
 , а
, а 
в операторной форме можно записать
 ,
,
Структурная схема кинематического звена при реализации методов пропорционального и параллельного сближения показана на рис. 8.
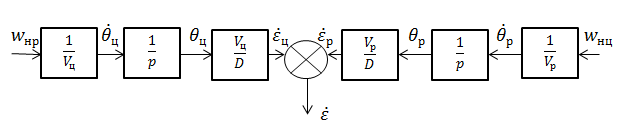 Рисунок 8 - Кинематическое звено контура самонаведения
Рисунок 8 - Кинематическое звено контура самонаведения
На рисунке  ,
,  - нормальные ускорения ракеты и цели.
- нормальные ускорения ракеты и цели.
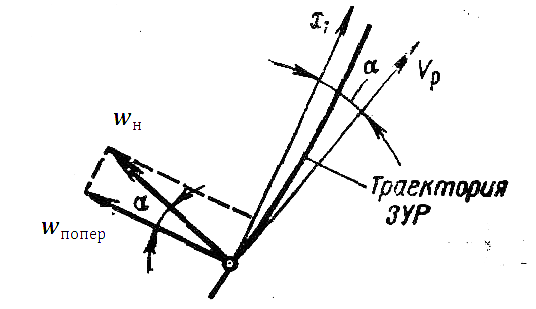
Рисунок 9 – Нормальное  и поперечное
и поперечное  ускорение ракеты, измеряемое ДЛУ
ускорение ракеты, измеряемое ДЛУ
Датчики линейных ускорений (ДЛУ) ориентируются так, чтобы их оси чувствительности совпадали с поперечными осями связанной системы координат ракеты. Ускорения, измеряемые ДЛУ, в принципе не равны нормальным ускорениям ракеты. Рассогласование осей связанной и скоростной систем координат, т. е. действующих и измеряемых ускорений, учитывается поправочным коэффициентом η.
Параметры передаточной функции ракеты полностью определяют ее динамические свойства.
Коэффициент усиления ракеты  характеризует маневренные свойства ракеты и определяет в установившемся режиме скорость приращения угла наклона траектории при отклонении руля на единицу угла:
характеризует маневренные свойства ракеты и определяет в установившемся режиме скорость приращения угла наклона траектории при отклонении руля на единицу угла:
Величина этого коэффициента определяется только ракетой и вследствие ограниченности управляющих моментов и нормальных управляющих сил не может быть улучшена системой управления.
Располагаемая перегрузка ракеты связана с коэффициентом зависимостью
где  — максимальное отклонение рулей высоты.
— максимальное отклонение рулей высоты.
Произведение  принято называть передаточным числом ракеты по нормальному ускорению (
принято называть передаточным числом ракеты по нормальному ускорению (  ).
).
Коэффициент усиления ракеты , а следовательно, и коэффициент усиления контура управления  зависят от скорости ракеты и плотности воздуха. С увеличением высоты полета ракеты значение коэффициента падает.
зависят от скорости ракеты и плотности воздуха. С увеличением высоты полета ракеты значение коэффициента падает.
Величина передаточного коэффициента , в состав которого в качестве одного из сомножителей входит коэффициент , значительно влияет на точность наведения ракеты на цель. Для уменьшения влияния положения точки встречи ракеты с целью (в пределах заданной зоны обстрела) на эффективность стрельбы значение коэффициента усиления ракеты необходимо стабилизировать. Наиболее действенный способ стабилизации — включение в состав ракеты устройств, корректирующих значение в зависимости от скорости ракеты и плотности воздуха. Работа этих устройств, как правило, связана с использованием датчиков скоростного напора. Получение требуемого значения относительного коэффициента демпфирования и его стабилизация достигаются охватом, ракеты обратными связями по угловой скорости вращения ракеты и поперечному ускорению. Сигналы обратных связей формируются, как правило, совокупностью измерителей, включаемых в автопилот. Такими измерителями являются демпфирующие гироскопы (ДГ) и датчики линейных ускорений (ДЛУ).
Собственная частота колебаний также зависит от условий полета ракеты (скоростного напора, статической устойчивости) и в реальных условиях стрельбы может изменяться а широких пределах. Она должна находиться в определенном соотношении с частотой среза контура управления, выбор которой обусловливается оптимумом систематических в случайных составляющих ошибок наведения.
Датчик угловой скорости (гироскоп) ДУСиспользуется в различных системах летательных аппаратов, в частности, автопилоте и предназначен для измерения угловой скорости ракеты и самолета и выдачи электрического сигнала, пропорционального измеряемой угловой скорости.
Широкое применение нашли ДУС с поплавковыми гироскопами. В таком гироскопе жидкость выполняет роль демпфирующей среды, в которой за счет трения жидкости о стенки корпуса и кожуха при повороте последнего в результате прецессии гироскопа создается демпфирующий момент.
На корпусе ДУС обычно указывают ось, вокруг которой он измеряет скорость. Эта ось называется измерительной, на корпусе она обозначается точкой и стрелкой. ДУС обычно устанавливают вблизи центра тяжести самолёта.
С развитием многоканальных систем управления получили блочные конструкции, объединяющие в одном корпусе несколько однотипных ДУС. Такие изделия называются блоком демпфирующих гироскопов, или сокращённо – БДГ (см. рис.10 ).
Для построения контура системы самонаведения при реализации метода параллельного (пропорционального) сближения необходимо рассмотреть также функциональные зависимости для бортового координатора и счетно-решающего прибора (СРП).
При самонаведении по методу параллельного или пропорционального сближения для измерения угловой скорости вращения линии ракета — цель могут применяться бортовые координаторы со следящим гироприводом, со следящей антенной и гироскопическими датчиками угловых скоростей.
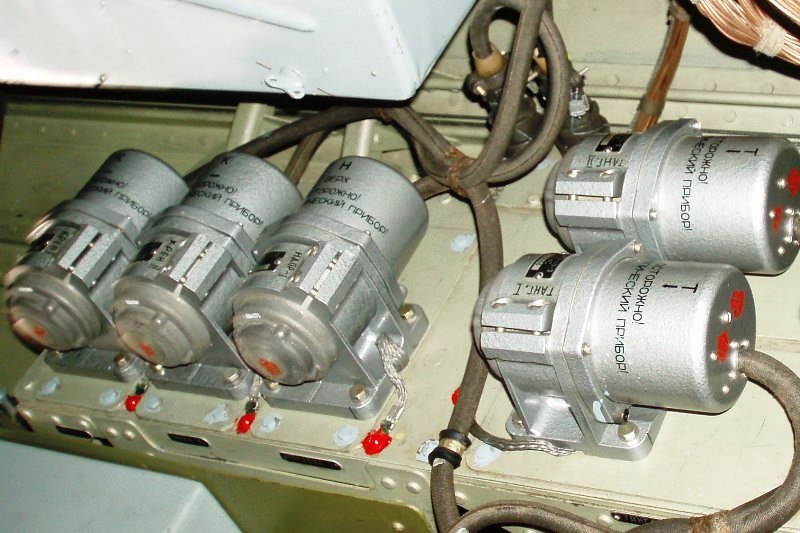
Рисунок 10 - Платформа с ДУС в отсеке самолёта
Входным воздействием координатора является значение угла . На выходе координатора формируется сигнал
 ,
,
где  ,
,  —передаточные функции пеленгатора и гиропривода соответственно.
—передаточные функции пеленгатора и гиропривода соответственно.
Координатор со следящим гироприводом обеспечивает измерение угловой скорости линии ракета — цель в стабилизированной системе координат, в то же время позволяет осуществить достаточно точное слежение за целью по угловым координатам.
Связь между сигналом рассогласования и формируемой СРП командой управления может быть представлена в виде

где К — коэффициент преобразования;
 — измеренное значение угловой скорости антенны;
— измеренное значение угловой скорости антенны;
 — компенсационная составляющая угловой скорости, обусловленная действием силы тяжести, продольным ускорением ЗУР и преломлением обтекателя;
— компенсационная составляющая угловой скорости, обусловленная действием силы тяжести, продольным ускорением ЗУР и преломлением обтекателя;
 — передаточная функция счетно-решающего прибора.
— передаточная функция счетно-решающего прибора.
На рис. 11 показан контур системы самонаведения при реализации метода пропорционального или параллельного сближения. Видим, что параметр рассогласования  является входным воздействием контура управления; при постоянных значениях
является входным воздействием контура управления; при постоянных значениях 

 величина его будет изменяться тем быстрее, чем ближе ракетa к цели. Поскольку звено
величина его будет изменяться тем быстрее, чем ближе ракетa к цели. Поскольку звено  вконтур включено последовательно, то коэффициент усиления контура с уменьшением D будет возрастать, увеличивая чувствительность системы управления, что приводит к увеличению точности наведения по мере сближения ракеты с целью.
вконтур включено последовательно, то коэффициент усиления контура с уменьшением D будет возрастать, увеличивая чувствительность системы управления, что приводит к увеличению точности наведения по мере сближения ракеты с целью.

Рисунок 11 - Контур системы самонаведения при реализации метода параллельного (пропорционального) сближения: ДГ – демпфирующий гироскоп, ДУ – датчик линейных ускорений
Это положение является принципиальным отличием данной системы от системы командного управления, в которой, как ранее отмечалось, по мере удаления ракеты от пункта управления точность наведения уменьшается.
Однако начиная с некоторой дальности D коэффициент усиления контура становится настолько большим, что контур возбуждается (нарушается условие запаса устойчивости контура управления по амплитуде) и управление становится невозможным, т. е. полет ракеты становится неуправляемым.
Для уменьшения размеров «мертвой» зоны необходимо уменьшать инерционность звена автопилот — ракета, что в свою очередь требует увеличения маневренных свойств ракеты.
Другой причиной нарушения процесса управления может послужить выход за пределы угла зрения пеленгатора линейных размеров цели при малой дальности между ракетой и целью. Например, при максимальном линейном размере цели 15—30 м и полезном угле зрения пеленгатора в 10° «мертвая» зона может быть на дальности 75—150 м.
ПРИЛОЖЕНИЕ 1
Передаточные функции типовых звеньев
| № | Тип звена | Передаточная функция звена | |
| Позиционные звенья | Безинерционное (элементарный усилитель) | 
| |
| Апереиодическое звено 1-го порядка | 
| ||
| Апереиодическое звено 2-го порядка | 
| ||
| Колебательное звено | 
| ||
| Консервативное звено | 
| ||
| Интегрирующие звенья | Идеальное интегрирующее звено | 
| |
| Интегрирующее звено c замедлением | 
| ||
| Изодромное звено | 
| ||
| Дифференцирующие звенья | Идеальное дифференцирующее звено | 
| |
| Дифференцирующее звено с замедлением | 
|
ПРИЛОЖЕНИЕ 2
Дата добавления: 2017-09-01; просмотров: 3279;
Поиск по сайту
Узнать еще
- File I/O (Файловый ввод/вывод)
- VII. Выводы и рекомендации
- Адресное пространство памяти и ввода - вывода
- Алгоритм вывода прямой линии
- Алгоритм отделения корней уравнения (аналитический метод)
- Анализ качества эмпирического уравнения множественной линейной регрессии
- Анализ контура детали при токарной обработке. Области и зоны токарной обработки
- Анализ основного уравнения лопаточного насоса.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
