Тиристорные регуляторы напряжения, принцип действия и характеристики.
Тиристорные регуляторы напряжения находят широкое применение в электроприводах переменного тока, где за счет регулирования напряжения на статоре асинхронных двигателей обеспечиваются регулирование токов и моментов двигателей в переходных режимах, симметрирование токов в фазах, ряд защит двигателя и некоторые другие опции. Одна из них связана с повышением энергетических показателей работы асинхронных электроприводов при малых нагрузках. Тиристорные регуляторы напряжения, выполняющие эту функцию, получили название регуляторов экономичности, или экономайзеров.
Возможность энергосбережения этим способом иллюстрируют зависимости тока статора 1Х от прикладываемого к двигателю напряжения U1 (рис. 3.19) при разных моментах нагрузки Мс| < Мс2< Мс3< Мс4. Эти зависимости иногда называют U-образными характеристиками двигателя. Как видно из графиков, при каждой нагрузке двигателя имеется такое напряжение, при котором потребляемый ток минимален. Снижение тока происходит за счет уменьшения его реактивной составляющей. За счет этого обеспечиваются снижение потерь энергии в двигателе, повышение его КПД и коэффициента мощности cosφ.

Рис. 3.20. Зависимости тока статора, потерь мощности, КПД и коэффициента мощности от напряжения
На рис. 3.20 показаны построенные для двигателя 4А180М4 мощностью 30 кВт зависимости КПД п., cosφ, относительных тока статора I1* и потерь мощности в двигателе ΔР* от относительного напряжения U1* при моменте нагрузки Mс, равном 20% от номинального. Из кривых видно, что наилучших значений эти показатели достигают при напряжениях, равных 0,6…0,8 номинального значения.
Достижение экстремальных значений указанных переменных может быть обеспечено с помощью двух возможных схем включения асинхронного двигателя.

Рис. 3.21. Структурная схема электропривода с экстремальным регулятором
На рис. 3.21 приведена одна из них — схема с так называемым экстремальным регулятором*, позволяющая минимизировать потребляемый двигателем ток при различных нагрузках Mс. Схема содержит асинхронный двигатель АД, ТРН со схемой управления СУ, датчики тока ДТ и напряжения ДН, функциональный преобразователь ФП и инерционное звено ИЗ. За счет выбора характеристики ФП обеспечивается минимизация потребления тока при различных нагрузках двигателя, а инерционное звено ИЗ совместно с отрицательной обратной связью по напряжению устраняет возможные автоколебания в системе.
Показано**, что экстремальные значения переменных двигателя обеспечиваются при определенных (оптимальных) его скольжениях, которые должны поддерживаться постоянными при любых нагрузках. Эти скольжения sопт определяются по формулам:
• при минимизации тока статора —
• при минимизации потерь мощности —

• при минимизации активной потребляемой мощности —

• при максимализации коэффициента мощности —

где R1 R'2, Rμ — соответственно активные сопротивления статора, приведенное ротора и контура намагничивания; Хμ, Хк.з. — соответственно индуктивные сопротивления контура намагничивания и короткого замыкания.
Значение тока статора при оптимальном скольжении может быть вычислено по следующей формуле:

где Мс — момент нагрузки двигателя; ω0 — скорость холостого хода.
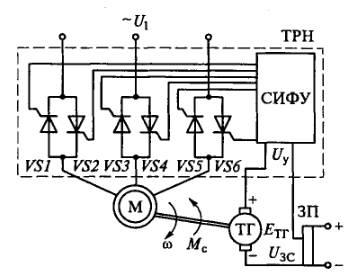
Рис. 3.22. Схема замкнутой системы ТРН — АД с обратной связью по скорости
Требуемый уровень оптимального скольжения может быть реализован в замкнутой по скорости системе ТРН—АД, схема которой приведена на рис. 3.22. На схеме обозначено: ТГ — тахогенератор, ЗП — потенциометр задания требуемой скорости (скольжения) двигателя. Схема обеспечивает поддержание скорости со и тем самым скольжения с определенной точностью при изменениях момента нагрузки Мс.
Дата добавления: 2021-07-22; просмотров: 611;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IP (Internet Protocol) – протокол межсетевого взаимодействия
- IV. Критерии и принципы обеспечения безопасности

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
