Способы управления напряжением якоря ДПТ НВ. Источники питания.

 1.Первый управляемый источник питания – генератор. (Г-Д)
1.Первый управляемый источник питания – генератор. (Г-Д)
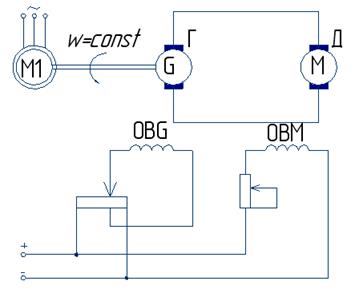
Принципиальная схема включения двигателя постоянного тока с независимым возбуждением по системе Г-Д приведена-на рис.1. Здесь генератор G спостоянной угловой скоростью приводится во вращение асинхронным или синхронным двигателем Ml; питание цепей возбуждении генератора G и исполнительного двигателя Мосуществляется от независимого источника постоянного тока. Якорь двигателя М присоединяется к якорю генератора G непосредственно.
Механические характеристики двигателя при неизменном потоке двигателя и изменении потока генератора (без учета реакции якоря) представляют собой семейство линейных характеристик, наклон которых остается постоянным и определяется общим сопротивлением якорной цепи
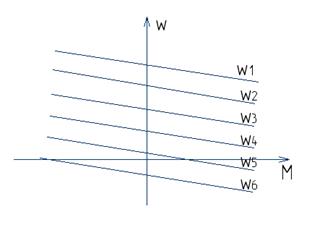
Механические характеристики двигателя располагаются в четырех квадрантах; основным достоинством этой системы является плавность регулирования, которая осуществляется воздействием на цепь возбуждения.
Система Г —Д может обеспечить двухзонное регулирование угловой скорости —до основной скорости изменением ЭДС генератора при постоянном потоке двигателя, а выше основной регулированием тока возбуждения двигателя при постоянной, равной номинальному значению ЭДС генератора.
Верхний предел угловой скорости при регулировании с постоянным потоком двигателя ограничивается номинальным значением ЭДС генератора и тем перепадом скорости, который обусловлен нагрузкой и сопротивлением якорной цепи. Нижний предел регулирования определяется заданным относительным перепадом угловой скорости при заданном изменении нагрузки.
Достоинства: хорошее управление, большой коэффициент усиления по мощности Кр=20
Недостатки:
1) необходимость в двукратном преобразовании энергии (из электрической энергии переменного тока в механическую и из механической вновь в электрическую постоянного тока регулируемого напряжения), что приводит к значительному снижению КПД;
2) наличие двух машин в преобразовательном агрегате, установленная мощность каждой, если пренебречь потерями в машинах, равна установленной мощности регулируемого двигателя;
3) значительные габариты и масса установки, необходимость в фундаменте для преобразовательного агрегата;
4) высокие капитальные и эксплуатационные расходы
2.Ртутные, твердотельные выпрямители. Система УРВ – Д.
Используются редко, т.к. много недостатков.
3. Система ТП – Д. (тиристорный преобразователь)
 Регулирование постоянного напряжения осуществляется регулированием угла включения вентилей в проводящей части периода переменного напряжения .и имеет свои особенности.
Регулирование постоянного напряжения осуществляется регулированием угла включения вентилей в проводящей части периода переменного напряжения .и имеет свои особенности.
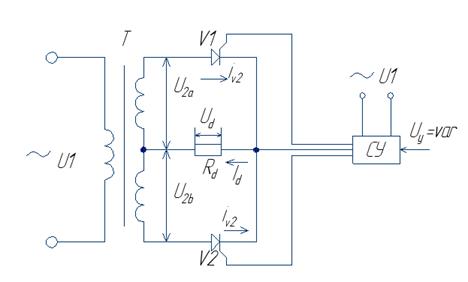
 Рассмотрим принцип регулирования напряжения на примере включения тиристоров по однофазной нулевой двухполупериодной схеме выпрямления, приведенной на рис. 1, а Допустим, что на управляющий электрод тиристора VI подается от системы управления СУ отрицательный импульс в момент времени t1 (рис. 1, б). Угол α, отсчитываемый от момента естественного включения вентиля VI, вызовет на нагрузке скачок напряжения, которое будет изменяться по кривой u2a. В момент t2 напряжение u2a становится равным нулю и тиристор VI закрывается. На интервале t2 – t3 oба тиристора закрыты и ток равен нулю, а в момент t3 вступает в действие тиристор V2 и остается открытым до момента t4 и т. д.
Рассмотрим принцип регулирования напряжения на примере включения тиристоров по однофазной нулевой двухполупериодной схеме выпрямления, приведенной на рис. 1, а Допустим, что на управляющий электрод тиристора VI подается от системы управления СУ отрицательный импульс в момент времени t1 (рис. 1, б). Угол α, отсчитываемый от момента естественного включения вентиля VI, вызовет на нагрузке скачок напряжения, которое будет изменяться по кривой u2a. В момент t2 напряжение u2a становится равным нулю и тиристор VI закрывается. На интервале t2 – t3 oба тиристора закрыты и ток равен нулю, а в момент t3 вступает в действие тиристор V2 и остается открытым до момента t4 и т. д.
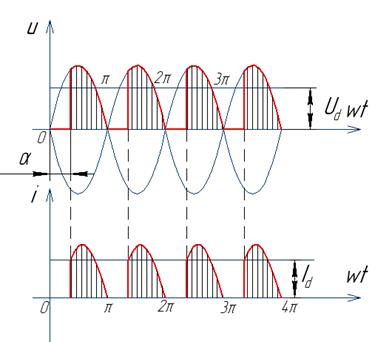
При активной нагрузке кривая выпрямленного тока (рис. 1, в) повторяет .кривую, выпрямленного напряжения.
Если изменяется угол α относительно начала синусоиды напряжения на анодах тиристоров, то соответственно меняется среднее значение выпрямленного напряжения.
Процессы в схеме с управляемым выпрямителем при учете индуктивности рассеяния обмоток трансформатора индуктивности обмотки якоря двигателя и противо-ЭДС двигателя имеют свою особенность. В этом случае графики изменения во времени напряжения и тока преобразователя имеют довольно сложный характер. Кривая выпрямленного напряжения состоит из положительных и отрицательных участков синусоид. Ток может быть как непрерывным, так и прерывистым.

 Выпрямленное напряжение (и выпрямленный ток) содержит постоянную Udи переменную составляющие (последняя содержит ряд гармоник). Наличие пульсаций (переменной составляющей) выпрямленных напряжения и тока ухудшает условия коммутации двигателей постоянного тока и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливается индуктивный фильтр, представляющий собой реактор, включаемый последовательно с якорем двигателя и обладающий большим реактивным сопротивлением для переменной составляющей выпрямленного тока, которая значительно уменьшается, а падение напряжения от этой составляющей на активном сопротивлении реактора незначительно. Другим средством уменьшения пульсаций выпрямленного напряжения является использование многофазных схем выпрямления.
Выпрямленное напряжение (и выпрямленный ток) содержит постоянную Udи переменную составляющие (последняя содержит ряд гармоник). Наличие пульсаций (переменной составляющей) выпрямленных напряжения и тока ухудшает условия коммутации двигателей постоянного тока и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливается индуктивный фильтр, представляющий собой реактор, включаемый последовательно с якорем двигателя и обладающий большим реактивным сопротивлением для переменной составляющей выпрямленного тока, которая значительно уменьшается, а падение напряжения от этой составляющей на активном сопротивлении реактора незначительно. Другим средством уменьшения пульсаций выпрямленного напряжения является использование многофазных схем выпрямления.
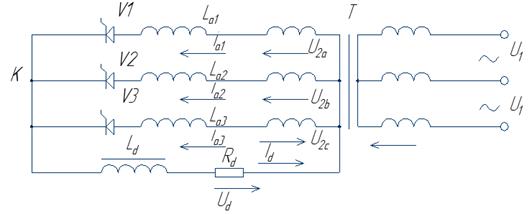 Рассмотрим форму напряжения и тока для трехфазной нулевой схемы включения тиристоров, показанной на рис. 2,а, с учетом индуктивности рассеяния, приведенной к вторичной обмотке трансформатора, и значительной индуктивности сглаживающего реактора Ld, при которой ток можно считать идеально сглаженным.
Рассмотрим форму напряжения и тока для трехфазной нулевой схемы включения тиристоров, показанной на рис. 2,а, с учетом индуктивности рассеяния, приведенной к вторичной обмотке трансформатора, и значительной индуктивности сглаживающего реактора Ld, при которой ток можно считать идеально сглаженным.
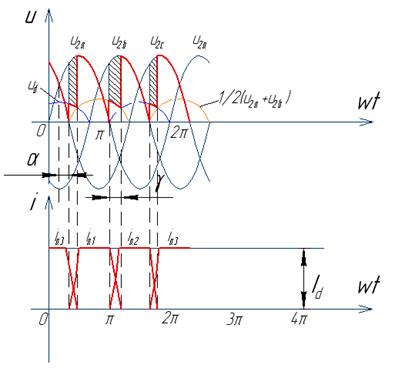
 Из-за индуктивности рассеяния вторичной обмотки трансформатора переход тока от одного тиристора к другому происходит не мгновенно, а в течение времени, которое соответствует так называемому углу коммутации. В интервале t1 – t4 работает тиристор V1; в момент t2 начинается процесс коммутации тока с тиристора VI на V2, в течение которого работают оба тиристора. За счет ЭДС самоиндукции, наводимой в фазе u2а, ток ial спадает не сразу, а из u2b вычитается часть напряжения, соответствующая ЭДС самоиндукции, которая препятствует росту тока ia2 так, что сумма токов ia1 n ia2., в момент коммутации остается равной выпрямленному току Id. К концу коммутации (момент t3), обозначенной углом γ, ток в тиристоре V1 становится равным нулю, а в тиристоре V2 возрастает до значения Id. В период коммутации выпрямленное напряжение становится меньшим и равным ud = 1/2 (u2а + u2b); оно изменяется так, как показано на рис. 2,б. К концу коммутации напряжение скачком возрастает до фазного напряжения u2b. Следовательно, выпрямленное напряжение снижается из-за индуктивного падения напряжения, которое показано заштрихованной площадкой на рис. 2,6. Форма кривой тока приведена на рис.2, в.
Из-за индуктивности рассеяния вторичной обмотки трансформатора переход тока от одного тиристора к другому происходит не мгновенно, а в течение времени, которое соответствует так называемому углу коммутации. В интервале t1 – t4 работает тиристор V1; в момент t2 начинается процесс коммутации тока с тиристора VI на V2, в течение которого работают оба тиристора. За счет ЭДС самоиндукции, наводимой в фазе u2а, ток ial спадает не сразу, а из u2b вычитается часть напряжения, соответствующая ЭДС самоиндукции, которая препятствует росту тока ia2 так, что сумма токов ia1 n ia2., в момент коммутации остается равной выпрямленному току Id. К концу коммутации (момент t3), обозначенной углом γ, ток в тиристоре V1 становится равным нулю, а в тиристоре V2 возрастает до значения Id. В период коммутации выпрямленное напряжение становится меньшим и равным ud = 1/2 (u2а + u2b); оно изменяется так, как показано на рис. 2,б. К концу коммутации напряжение скачком возрастает до фазного напряжения u2b. Следовательно, выпрямленное напряжение снижается из-за индуктивного падения напряжения, которое показано заштрихованной площадкой на рис. 2,6. Форма кривой тока приведена на рис.2, в.

Дата добавления: 2017-05-02; просмотров: 2232;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Способы представления переменного синусоидального тока и напряжения.
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- III. Компаудный ДПТ (Смешанное возбуждение)
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- Tема 2 ИСТОЧНИКИ БАНКОВСКОГО ПРАВА
- V. СПОСОБЫ ПОЛУЧЕНИЯ И ХИМИЧЕСКИЕ СВОЙСТВА АЦЕТИЛЕНОВЫХ И ДИЕНОВЫХ УГЛЕВОДОРОДОВ
- VII. Риски и способы их минимизации

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
