Искусственные характеристики ДПТ НВ
Искусственные характеристики являются элементом управления двигателем.
Уравнения механической характеристики двигателя:
 (1)
(1)
Откуда
 (2)
(2)
Так как  , тогда из (1)
, тогда из (1)
 (3)
(3)
Частота вращения пропорциональна приложенному напряжению и обратно пропорциональна потоку.
Если из (2) определить
 (4), то подставляя (3) в (2), получаем
(4), то подставляя (3) в (2), получаем
 - механическая характеристика двигателя
- механическая характеристика двигателя 
 (5)
(5)


Назовем естественной характеристику (5), получаемую при паспортных параметрах питания двигателя:  ,
,  ,
, 
Типовая схема включения:
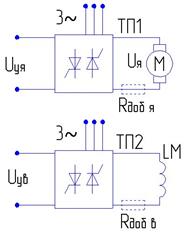
ТП – тиристорный преобразователь (позволяет изменять возбуждение двигателя).
Способы формирования искусственных характеристик:
1. искусственные характеристики путем изменения напряжения якоря. Требуется регулируемый источник ТП1.
2. искусственные характеристики при регулировании сопротивления якоря Rдоб я
3. управление возбуждением. Требуется регулируемый возбудительТП2, либо добавочное сопротивление Rдоб в
2.3.1. 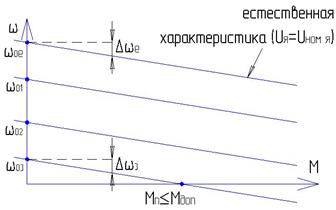 Искусственные характеристики путем изменения напряжения якоря
Искусственные характеристики путем изменения напряжения якоря
Пусть схема управления двигателем ДПТ НВ соответствует выше приведенной, причем Uув=const и Ф=const, Rдоб=0. Uyя=var, т.е есть возможность управления напряжением якоря Uя=var.
Проанализируем уравнение механической характеристики ω(М) (5).
Видно, что от Uя зависит только скорость идеального холостого хода ω0. Поэтому в уравнении прямой линии, которую представляет (5) координатах (ω,М), при Uя=var изменяется только начальная ордината ω0i. Наклон прямой, определяемой жесткостью β, не зависит от Uя.
Отсюда следует: при изменении напряжения регулировочные характеристики располагаются параллельно друг другу и естественной характеристике, т. е. имеют одинаковую жесткость, что определяет высокую стабильность угловой скорости, свойственную естественной характеристике.
U3<U2<U1<Uя ном ,  ; β=const
; β=const
Этим способом можно обеспечить пуск двигателя, задав малое напряжение и повышая его.
Мдоп – допустимый момент двигателя.
Плавность регулирования определяется плавностью изменения напряжения питания и обычно характеризуется значением коэффициента плавности (см далее).
Коэффициент полезного действия двигателя в данном случае (без учета потерь на возбуждение) равен отношению фактической угловой скорости двигателя к угловой скорости идеального холостого хода на заданной характеристике. Потери мощности в якорной цепи при постоянном моменте нагрузки остаются неизменными при регулировании угловой скорости и равными потерям при работе на естественной характеристике (п.2.2). Но поскольку полезная мощность по мере снижения угловой скорости уменьшается, то и КПД двигателя падает. Вследствие малых потерь мощности в цепи якоря этот способ регулирования скорости является экономичным. Однако для полной оценки экономичности необходимо учитывать потери мощности еще в устройстве, посредством которого регулируется напряжение на якоре двигателя, и затраты на это устройство.
Регулирование угловой скорости осуществляется вниз от основной, так как напряжение, прикладываемое к якорю, в большинстве случаев может изменяться только вниз от номинального. Эту зону механической характеристики называют I зоной, а привод – однозонным (см. п. 2.3.3)
Допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости остается постоянным, так как допустимый ток якоря равен номинальному, а поток при независимом возбуждении остается неизменным (номинальным). Поэтому этот способ наиболее подходит для привода рабочих машин типа постоянный момент.
Достоинства:
постоянная жесткость механической характеристики (одинаковое падение скорости под нагрузкой при различных Uя);
величина потерь в якорной цепи также постоянна на различных характеристиках (но и уменьшить потери дальше нельзя);
высокая точность стабилизации скорости.
Дата добавления: 2017-05-02; просмотров: 2528;
Поиск по сайту
Узнать еще
- II. Физические характеристики участников коммуникации
- III. Компаудный ДПТ (Смешанное возбуждение)
- III. Разные искусственные массы
- U – образные и рабочие характеристики синхронного двигателя
- U – образные характеристики синхронного генератора
- U-образные характеристики
- XIII. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ
- АДПТАЦИЯ, ЕЕ ВИДЫ И ПЕРИОДЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
