Сравнение двигателей различных систем возбуждения
Требования, предъявляемые к тяговым двигателям.
Основными требованиями, которым должны удовлетворять тяговые двигатели, являются:
электрическая устойчивость, т. е. способность автоматически стремиться к состоянию электрического равновесия при переходе с одного режима на другой;
механическая устойчивость, т. с. способность автоматически приближаться к состоянию динамического равновесия;
равномерное распределение нагрузок между параллельно работающими двигателями;
максимальное использование сцепного веса;
устойчивость коммутации;
наименьшее воздействие на энергосистему;
возможность плавного регулирования скорости и применения рекуперации;
простота конструкции.
Электрическая устойчивость.Анализ электрической устойчивости работы тяговых двигателей проводится при следующих допущениях:
пренебрегаем вихревыми токами, возникающими вдвигателе;
рассматриваем только силовую цепь двигателя и считаем, что при случайных отклонениях от состояния равновесия всиловой цепи токи в параллельных ветвях остаются неизменными.
Для силовой цепи двигателя постоянного тока уравнение переходного процесса можно представить в виде
 , (1)
, (1)
где UД - напряжение, приложенное к двигателю; СФv - э. д. с. двигателя; I - ток якоря двигателя; r - сопротивление цепи двигателя; L - индуктивность силовой цепи двигателя.
Если по каким-либо причинам произойдет увеличение тока, электрически устойчивая система будет стремиться вернуться к положению равновесия, т. е. уменьшить ток.
При этом производная  будет отрицательной. Если же произойдет случайное уменьшение тока, возврат к положению электрического равновесия должен сопровождаться увеличением тока. Отсюда следует, что в электрически устойчивой системе знаки отклонения тока и производной противоположны. Условие электрической устойчивости системы в данном случае может быть записано в виде
будет отрицательной. Если же произойдет случайное уменьшение тока, возврат к положению электрического равновесия должен сопровождаться увеличением тока. Отсюда следует, что в электрически устойчивой системе знаки отклонения тока и производной противоположны. Условие электрической устойчивости системы в данном случае может быть записано в виде
 . (2)
. (2)
Из выражения (1) следует
 . (3)
. (3)
Следовательно, условие электрического равновесия запишется в виде
 ,
,
или
 ,
,
откуда следует, что
Как следует из полученного соотношения, для того, чтобы система находилась в состоянии электрического равновесия, необходимо, чтобы при увеличении тока э. д. с. двигателя СФv, которая уравновешивается разностью приложенного напряжения UД и падением напряжения Ir, возрастала бы в большей степени, чем эта разность.
На рис. 1 представлены диаграммы напряжений (Uд, э. д. с. СФv и падений напряжения для двигателей последовательного (а), параллельного (6), согласно-смешанного (в) и встречно-смешанного (г) возбуждения.
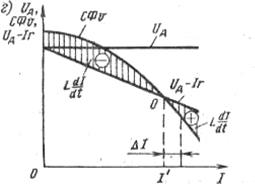
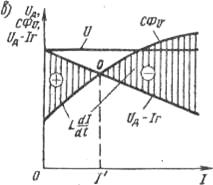
Рис. 1. К анализу электрической устойчивости двигателей последовательного возбуждения (а), параллельного (б), согласно0смешанного (в) и встречно-смешанного (г)
На приведенных диаграммах кривые э.д.с. СФv подобны кривым СФ(I) для каждой системы возбуждения двигателей. Напряжение UД, приложенное к двигателю, принимается постоянным, а линии (UД - Ir) представляют разность между приложенным к двигателю напряжением UД и падением напряжения в цепи двигателя. Ординаты заштрихованных площадей представляют собой значения  и характеризуют знак и скорость изменения тока. Точки пересечения О являются точками электрического равновесия, так как в этих точках
и характеризуют знак и скорость изменения тока. Точки пересечения О являются точками электрического равновесия, так как в этих точках  и
и  .
.
Как следует из приведенных диаграмм, электрически устойчивыми являются двигатели последовательного, согласно-смешанного и параллельного возбуждения. Причем у двигателя параллельного возбуждения характеристика СФv(I) дважды пересекается с прямой UД - Ir в точках О и О'. Но условие устойчивого электрического равновесия
соблюдается только в точке О.
Двигатели встречно-смешанного возбуждения в точке О и параллельного в точке О', которые соответствуют значительным нагрузкам, неустойчивы, так как
Анализ электрической устойчивости двигателя последовательного возбуждения показывает, если в точке О электрического равновесия произойдет случайное увеличение тока на некоторое значение ΔI, то разность UД - Ir станет меньше э. д. с. СФv. Э. д. с. самоиндукции станет отрицательной, а это приведет к тому, что ток станет убывать. Ток будет уменьшаться до тех пор, пока UД - Ir не сравняется с СФv., т. е. система возвратится в положение электрического равновесия. И наоборот, при случайном уменьшении тока на некоторое значение ΔI от точки О электрического равновесия, СФv станет меньше UД - Ir.Э. д. с. самоиндукции станет положительной, что приведет к возрастанию тока. Таким образом, подтверждается электрическая устойчивость двигателя последовательного возбуждения.
Механическая устойчивость. Из уравнения движения подвижного состава в режиме тяги
следует, что динамическое равновесие будет определяться равенством
FЛ - W = 0.
Характеристика двигателя будет механически устойчива, если справедливо соотношение
 .
.
Тогда:
или
 .
.
Производная силы тяги по скорости должна быть меньше производной противодействующей силы. На рис. 2 представлены тяговые характеристики FЛ(v), кривые сопротивления движению W(v) для двигателей последовательного (а), параллельного (6), согласно-смешанного (в) и встречно-смешанного (г) возбуждения. Точки пересечения О кривых F и W соответствуют установившимся скоростям  , т.к. в них
, т.к. в них  и
и  . Ординаты заштрихованных площадей представляют величины, пропорциональные ускорению
. Ординаты заштрихованных площадей представляют величины, пропорциональные ускорению  с соответствующими знаками.
с соответствующими знаками.
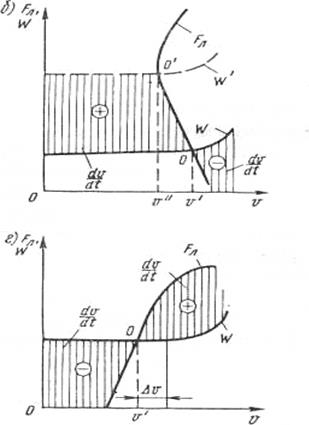
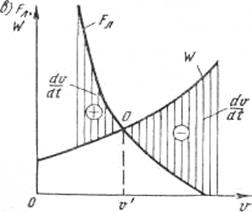
Рис. 2. К анализу механической устойчивости двигателя последовательного (а), параллельного (б), согласно-смешанного (в) и встречно-смешанного (г)
Устойчивым динамическим равновесием обладают двигатели последовательного (а) и согласно-смешанного возбуждения (в), поскольку сила тяги FЛ , падает, а сила сопротивления движению W растет с увеличением скорости v. Так, при случайном увеличении скорости на некоторое значение Δv сила тяги FЛ станет меньше силы сопротивления W. Ускорение становится отрицательным, это приведет к тому, что скорость поезда будет уменьшаться, пока не достигнет прежней скорости v'. Двигатель параллельного возбуждения (б) устойчив только при небольших нагрузках (точка О). При больших нагрузках (точка О'), чему соответствует большее сопротивление движению W, двигатель параллельного возбуждения становится механически неустойчивым, так как при случайном увеличении скорости сила тяги FЛ становится больше силы сопротивления W.
Двигатель встречно-смешанного возбуждения с преобладающей параллельной обмоткой (г) механически неустойчив, поэтому он не применяется в электрической тяге.
Дата добавления: 2017-03-12; просмотров: 2645;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
