ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ СУДНА НА КУРСЕ. ДИАГРАММА УПРАВЛЯЕМОСТИ
В реальных условиях плавания судно, находящееся в состоянии установившегося движения, т. е. следующее прямым курсом или совершающее установившуюся циркуляцию, обычно подвергается воздействию случайных внешних импульсов — порывов ветра, ударов волн, случайных изменений тяги движителей и т. п. Эти импульсы вызывают малые изменения (возмущения) значений первоначальных параметров, определяющих движение судна, а именно его скорости и, курсового угла φ, угла дрейфа при центре тяжести судна В0 и угловой скорости вращения судна w.
Известно, что некоторые суда держатся на прямом курсе устойчиво и почти не требуют перекладок руля, тогда как другие суда подвержены рыскливости и для удержания их на заданном курсе необходимо непрерывно маневрировать рулем. Поэтому при исследовании устойчивости движения судна принято различать теоретическую (автоматическую) и эксплуатационную устойчивость. Рассматривая условия теоретическом устойчивости движения, исходят из предположения, что руль судна закреплен в данном положении. Эксплуатационная устойчивость рассматривается в условиях, когда судоводитель использует руль по своему усмотрению для удержания судна на данном курсе. Оценка теоретической устойчивости может быть произведена аналитическим путем; оценка эксплуатационной устойчивости требует проведения эксперимента.
В зависимости от того, как изменяется какой-либо из перечисленных выше параметров движения после прекращения воздействия на него внешних импульсов, движение судна называют (в отношении данного параметра):
асимптотически устойчивым, если возмущение этого параметра с течением времени затухает до нуля и судно возвращается к первоначальному режиму движения;
неасимптотически устойчивым, если с течением времени судно входит в другой режим движения, в котором данный параметр приобретает новое постоянное значение;
неустойчивым, если возмущение данного параметра с течением времени продолжает нарастать.
В отношении скорости v движение всех судов асимптотически устойчиво — при случайном кратковременном изменении полезной тяги гребных винтов с течением времени восстанавливается прежняя скорость движения.
По углу курса движение судна может быть либо неустойчивым, либо неасимптотически устойчивым, поскольку в природе не существует сил, способных автоматически, без перекладки руля, вернуть судно на заданный курс после его изменения в результате случайных возмущений. Поэтому о теоретической устойчивости движения судна целесообразно судить по характеру изменений угла дрейфа р0 и угловой скорости со.
Рассмотрим судно, руль которого закреплен в диаметральной плоскости, движущееся прямолинейной со скоростью vx под курсовым углом φ (рис. 4.6). Пусть в результате случайного импульса, например налетевшего шквала ветра с правого борта, судно получило дополнительную скорость vy, что привело к возникновению угла дрейфа β0. Косое натекание потока на корпус с результирующей скоростью v вызовет прежде всего появление позиционной гидродинамической силы Yпоэ, а после приведения ее к центру тяжести судна ■— позиционного момента, называемого обычно в этом случае моментом зарыскивания Мзар, который будет стремиться повернуть судно по часовой стрелке с некоторой угловой скоростью со. Вращение судна при одновременном его поступательном движении приведет к возникновению демпфирующей силы Удем, демпфирующего момента Мдем, стремящегося уменьшить угол дрейфа, а также центробежной силы инерции Уцб
Характер дальнейшего движения судна зависит от соотношений его главных размерений и от формы подводного объема, определяющих значения возникших сил и моментов.
Судно может продолжать прямолинейное движение с нулевым углом дрейфа, но с изменившимся курсовым углом φ+Δφ , т. е. его движение будет асимптотически устойчивым по углу дрейфа и угловой скорости и неасимптотически устойчивым по курсовому углу. В этом случае в целом прямолинейное движение судна следует считать теоретически устойчивым.
Иначе, как показано на рис. 4.6, судно может войти в циркуляцию, которая с течением времени приобретает установившийся характер, т. е. его движение будет неасимптотически устойчивым по углу дрейфа и угловой скорости, но неустойчивым по курсовому углу. В целом движение судна следует считать в этом случае теоретически неустойчивым на прямом курсе.
Если судно обладает теоретической устойчивостью на прямом курсе, то его любое установившееся криволинейное движение (с переложенным рулем) будет теоретически устойчивым. Судно, теоретически неустойчивое на прямом курсе, приобретает с течением времени теоретическую устойчивость движения, имея руль закрепленным в диаметральной плоскости, при определенных значениях угла дрейфа и угловой скорости.
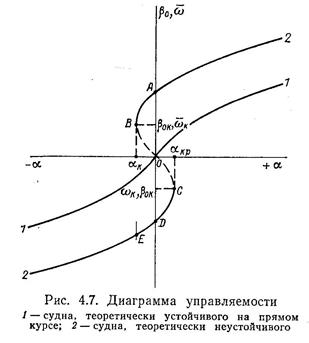
Диаграмма управляемости.Для полного представления о маневренных свойствах судна служит диаграмма управляемости, которая может быть построена расчетным способом либо путем обработки результатов модельного или натурного эксперимента (рис. 4.7). Диаграмма управляемости выражает графически зависимость от, угла перекладки руля а угла дрейфа р0 на установившейся циркуляции или соответствующей ему безразмерной
угловой скорости циркуляции
Положительные значения угла перекладки руля (на правый борт) откладываются на диаграмме по оси абсцисс вправо. Им соответствуют положительные значения угла дрейфа и угловой скорости, отвечающие повороту судна по часовой стрелке.
Кривая 1 на рис. 4.7 характеризует поворотливость судна, обладающего теоретической устойчивостью движения, а кривая 2 — не обладающего теоретической устойчивостью прямолинейного движения. На рисунке показан общий характер этих кривых, ординаты которых, вообще говоря, не пропорциональны и поэтому зависимости β0 = f(a)и ώ=f(а) не могут быть изображены одной кривой подобно диаграммам статической остойчивости M=f(а) и l= f(θ).
Характерной особенностью кривой 2 является наличие трех точек А, 0 и D, определяющих значения β0 или со при нулевом угле перекладки руля а = 0.Точки А и D определяют устойчивое движение судна после самопроизвольного выхода на установившуюся циркуляцию; точка 0 отвечает неустойчивому прямолинейному движению судна с нулевым углом дрейфа. Точка В определяет так называемый критический угол акр, т. е. минимальный угол, на который необходимо переложить руль на левый борт, чтобы выйти из правой циркуляции. При этом судно через некоторое время перейдет в левую циркуляцию с элементами β0е и ώ0е, определяемыми точкой Е на кривой. Аналогичное значение имеет точка С при левой циркуляции. Участок ВС кривой, проведенный на рисунке пунктиром, отвечает области неустойчивого движения судна, в который его прямой курс можно обеспечить только периодической перекладкой руля с борта на борт на некоторые углы, лежащие в пределах углов ±аКр. Другими словами, в этой области может быть обеспечена только эксплуатационная устойчивость движения судна.
Эксплуатационная устойчивость движения судна считается обычно удовлетворительной, если для поддержания заданного курса приходится перекладывать руль с борта на борт не более 4—6 раз в минуту, а углы рыскания при этом не превосходят 2—3°.
Указатель литературы
1. Атлас диаграмм для расчета буксировочной мощности морских транспортных судов. ОСТ 5. 0181—75. Изд. официальное, М.
2. Бакаев В. Г., Лаврентьев В. М. Расчет пути и времени разгона и торможения судна под действием гребного винта.— Труды ЦНИИМФ. Л., Морской транспорт, 1955, вып. 1, т. 1.
Дата добавления: 2017-03-12; просмотров: 6245;
Поиск по сайту
Узнать еще
- I-d диаграмма влажного воздуха
- I-s диаграмма рабочего процесса ГТД
- I. Выборы: понятие, значение и виды.
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- I. Понятие политического лидерства.
- I. Понятие политической власти.
- I. Понятие, происхождение и признаки государства.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
