СИЛЫ, ВЫЗЫВАЮЩИЕ ИЗМЕНЕНИЕ КУРСА СУДНА И ОПРЕДЕЛЯЮЩИЕ ЕГО ДАЛЬНЕЙШЕЕ ДВИЖЕНИЕ.
Общие положения.Управляемостью называют способность судна удерживать заданное направление движения или изменять его в соответствии с желанием судоводителя. Таким образом, свойство управляемости определяется наличием у судна двух качеств — устойчивости на курсе и поворотливости. Эти качества, вообще говоря, по своей природе антагонистичны:
известно, что улучшение устойчивости на курсе обычно приводит к ухудшению поворотливости, и наоборот; поэтому обеспечение судну хорошей управляемости требует установления некоторого оптимального соотношения между показателями устойчивости на курсе и поворотливости.
Теория управляемости, попытки создания которой имели место еще во времена Эйлера, сложилась на основе современной теоретической и экспериментальной аэро- и гидромеханики. В нашей стране стройная теория управляемости судна создана благодаря трудам К. К. Федяевского, В. М. Лаврентьева, А. М. Васина, Г. В. Соболева, Р. Я. Першица, Г. А. Фирсова и других исследователей, разработавших основы расчета устойчиво-
сти на курсе и поворотливости судна. Сейчас этим вопросам уделяется большое внимание как в СССР, так и за рубежом. В широком масштабе проводятся модельные экспериментальные исследования в аэродинамических трубах и циркуляционных бассейнах, а также натурные испытания судов, поэтому в ближайшие годы следует ожидать дальнейшего развития теории управляемости, практическое применение которой позволит повысить маневренные качества судов и снизить их аварийность.
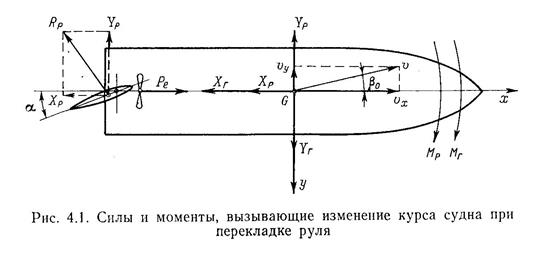
Силы и моменты, вызывающие изменение курса судна.Пусть судно идет прямым курсом со скоростью vx под действием тяги винта Ре (рис. 4.1). После перекладки руля на борт возникает продольная Хр и поперечная Yp составляющие гидродинамической силы Rp на руле, которые приводятся к центру тяжести судна с моментом Мр, стремящимся повернуть судно вокруг вертикальной оси (по часовой стрелке при перекладке руля на правый борт). Сила Yp вызывает дрейф судна со скоростью vy и результирующее движение судна с углом дрейфа р0 между диаметральной плоскостью судна и вектором скорости v его центра тяжести.
Косое натекание потока на корпус судна приводит к появлению поперечной составляющей Уг равнодействующей Рг гидродинамических сил на корпусе, после приведения которой к центру тяжести судна возникает момент Mv, также способствующий вращению судна в том же направлении вокруг вертикальной оси. В результате совместного действия этих сил и моментов судно изменит свой курс—его центр тяжести будет перемещаться по некоторой криволинейной траектории, причем угол дрейфа и угловая скорость вращения судна будут изменяться под действием возникающих при таком движении сил и моментов (рассмотренных далее в этом параграфе) до тех пор, пока эти силы и моменты не придут в равновесие.
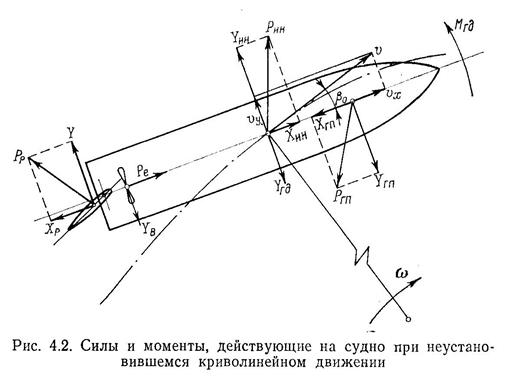
Силы и моменты, действующие на судно при его криволинейном движении. При неустановившемся криволинейном движении и при отсутствии таких внешних факторов, как ветер и волнение моря, на судно будут действовать следующие силы и моменты (рис. 4.2):
тяга гребного винта Ре и боковая сила на винте YB, возникающая вследствие косого натекания потока на винт и направленная в сторону поперечной составляющей скорости набегающего потока;
гидродинамическая сила Рр на пере руля, который можно рассматривать как крыло, расположенное в потоке под некоторым эффективным углом атаки аЭф, отличающимся от угла перекладки руля а. Угол аЭф зависит от направления потока, омывающего руль, которое определяется, как показано на рис. 4.3, местным углом дрейфа рр в районе расположения руля и дополнительной аксиальной скоростью yxpi потока, отбрасы-
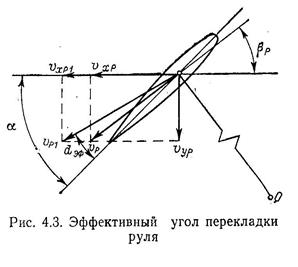
ваемого работающим гребным винтом (с учетом попутного потока в районе расположения руля);
гидродинамические силы неинерционной природы на подводной части корпуса. Если судно рассматривать как крыло малого удлинения, перемещающееся в жидкости, и считать, что в каждый момент времени его движение слагается из прямолинейного движения со скоростью v=wR и постоянным углом дрейфа βо по всей длине судна и вращательного движения вокруг вертикальной оси, проходящей через его центр тяжести G, то применительно к этим слагаемым можно ввести понятия о позиционной гидродинамической силе и демпфирующих силе и моменте. Позиционная сила Рш является равнодействующей .. гидродинамических сил, возникающих на подводной поверхности судна при его движении в определенном положении (позиции) по отношению к набегающему (в обращенном движении) потоку жидкости. Точка ее приложения при малых углах дрейфа расположена на некотором расстоянии в нос от центра тяжести судна, которое уменьшается по мере возрастания угла дрейфа. Демпфирующий момент Мщ возникает в результате вращения судна относительно вертикальной оси, которое вместе с тем приводит к изменению характера обтекания корпуса, изменению местных углов дрейфа по всей длине судна и появлению вследствие этого дополнительной (демпфирующей) гидродинамической силы Угд;
силы и момент, обусловленные инертностью как самого судна, так и окружающей его жидкости. Инерционная сила РИн в проекциях Хтп и Ymi на координатные оси, а также инерционный момент М1Ш определяются известными в гидродинамике методами с учетом присоединенных масс воды.
Выражая перечисленные выше силы и моменты через элементы судна и кинематические параметры его движения и приравнивая нулю суммы проекций всех сил на координатные оси Gx и Gy, а также сумму их моментов относительно вертикальной оси, можно получить систему дифференциальных уравнений движения судна. Интегрирование этой системы позволяет найти значения параметров движения в функции времени и построить траекторию движения.
Составление системы дифференциальных уравнений криволинейного движения судна в развернутой форме и решение этой
системы весьма сложны и поэтому выходят за пределы данного курса. Они рассматриваются в специальных трудах, посвященных этому вопросу.
Момент на баллере руля.Наиболее распространенный в практике судостроения балансирный руль представляет собой крыло симметричного авиационного профиля, расположенное в период маневра в потоке под некоторым эффективным углом атаки аЭф. Угол аЭф, как уже было указано выше, отличается от угла перекладки руля а вследствие скоса натекающего по-
Рис. 4.4. Руль в набегающем потоке жидкости
тока, влияния корпуса и гребного винта. При маневрировании этот угол может быть больше или меньше угла перекладки. Как видно на рис. 4.4, момент на баллере руля может быть выражен формулой
M6 = N(xllA-x6)
где N— нормальная составляющая гидродинамической силы на руле: N = Cn—^-Sp; Сп — коэффициент нормальной силы; vv —
скорость натекающего на руль потока; 5Р — площадь руля, Абсцисса центра давления хцл=СрЬср; Ср — коэффициент центра давления; ЬСр —средняя ширина руля; bCp = Sp/h; h — высота руля; лгб — абсцисса оси баллера,
ЦИРКУЛЯЦИЯ СУДНА
4 Предположим, что на судне, следующем прямолинейным курсом со скоростью Уо> в некоторый момент времени t0 начали перекладывать руль на борт, изменяя угол перекладки от а = 0 до некоторого значения а = атах(рис. 4.5). С этого момента траектория движения центра тяжести судна начинает отклоняться от прямой линии — судно входит в циркуляцию. На рисунке показана правая циркуляция, отвечающая перекладке руля на правый борт.
Различают три периода циркуляции: маневренный, эволюционный и установившейся циркуляции.
Продолжительность маневренного периода соответствует времени перекладки руля. В этом периоде на руле возникает постепенно возрастающая гидродинамическая сила, под действием которой скорость судна несколько уменьшается, оно начинает дрейфовать в сторону левого борта и поворачиваться по часовой стрелке. В результате появляется угол дрейфа (Зо и как следствие этого возникает поперечная составляющая гидродинамической силы на корпусе. Однако повороту судна будет при этом противодействовать значительный момент инерции массы судна и присоединенной массы воды, поэтому мгновенные центры кривизны циркуляционной кривой в этом периоде располагаются в большинстве случаев (при правой циркуляции) с левого борта судна.
Эволюционный период начинается в момент окончания перекладки руля. В этом периоде, вследствие постепенного увеличения угла дрейфа, существенное значение приобретает поперечная составляющая гидродинамической силы на корпусе, направленная внутрь циркуляции. Дрейф судна в сторону левого борта прекращается, мгновенные центры циркуляционной кривой перемещаются на правый борт, т. е. внутрь циркуляции. Скорость судна продолжает уменьшаться.
Период установившейся циркуляции наступает, когда угол дрейфа перестает расти и наступает равновесие всех действующих на судно сил и моментов. Элементы движения судна принимают при этом установившийся характер, т. е. перестают изменяться во времени, а циркуляционная кривая превращается в окружность с центром в точке 0. Обычно для транспортных морских судов начало периода установившейся циркуляции соответствует изменению первоначального курса судна на 100— 150°.
Геометрическими характеристиками циркуляции являются (см. рис. 4.5):
выдвиг /, — расстояние между положением центра тяжести судна в момент начала перекладки руля и его положением после изменения угла курса на 90°, измеренное по направлению движения судна перед выходом на циркуляцию;
Установившееся циркуляция
Рис. 4.5. Циркуляция судна
прямое смещение l2— расстояние между положением центра тяжести судна в момент начала перекладки руля и его положением после изменения угла курса на 90°, измеренное по нормали к направлению движения судна перед выходом на циркуляцию;
обратное смещение l3 — наибольшее расстояние, на которое смещается центр тяжести судна в сторону, обратную направлению циркуляции;
тактический диаметр циркуляции Z)T — расстояние между диаметральной плоскостью судна перед выходом на циркуляцию и положением ее после изменения угла курса на 180°;
диаметр установившейся циркуляции йц — диаметр окружности, являющейся траекторией движения центра тяжести судна в период установившейся циркуляции;
угол дрейфа р0 в период установившейся циркуляции — угол между диаметральной плоскостью судна и вектором окружной скорости его центра тяжести.
Перечисленные выше характеристики циркуляции зависят от угла перекладки руля. Для морских транспортных судов с обычными рулями (без подруливающих устройств) при а=30+35° они лежат в следующих пределах:

Диаметр установившейся циркуляции является основным показателем поворотливости судна. Чем он меньше, тем лучше поворотливость. Диаметр установившейся циркуляции можно уменьшить, изменив соотношения главных размерений и коэффициент общей полноты, увеличив площадь руля и угол его перекладки. На малых скоростях этому способствуют средства активного управления судном (активные рули, подруливающие устройства).
Дата добавления: 2017-03-12; просмотров: 4636;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Homo politicus и его роли
- HTML заголовок и его виды
- I-s диаграмма рабочего процесса ГТД
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- I.5.1 ГРАВИТАЦИОННОЕ ПОЛЕ, ЕГО НАПРЯЖЁННОСТЬ
- I2. Особенности аэродинамики несущего винта (НВ)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
