ГЕОМЕТРИЯ ГРЕБНОГО ВИНТА.
Основными элементами гребного винта являются ступица, представляющая собой тело вращения, и укрепленные на ней лопасти (рис. 3. 8). Расстояние R от оси винта до конца лопасти (точки, наиболее удаленной от оси) называется радиусом винта; его удвоенное значение равно диаметру винта D — 2R. Часть лопасти, примыкающую к ступице, называют корнем лопасти, а ее свободный конец — краем лопасти (рис. 3.9, а). Боковую кромку лопасти, обращенную в сторону вращения гребного винта при переднем ходе судна, называют входящей кромкой; противоположную ей кромку — выходящей. Поверхность лопасти, обращенная в корму судна и воспринимающая реакцию отбрасываемой воды при переднем ходе судна, называется нагнетательной поверхностью; противоположная ей (обращенная к корпусу судна)—засасывающей поверхностью. Форма лопасти характеризуется ее контуром, который образуется пересечением нагнетающей и засасывающей поверхностей.
Рис. 3.8. Схема конструкции гребного винта (сборного): а — конструктивные элементы; б — схема конуса вала
1 — лопасти; 2 — ступица; 3 — обнижение в ступице, уменьшающее объем шабровки; 4 — облицовка гребного вала; 5 — шпонка; 6 — носовое уплотнение; 7 — конус гребного вала; 8 — хвостовик гребного вала; 9 — кормовое уплотнение;
10 -
гайка хвостовика;
Обтекатель
Конструктивные элементы, представленные на рис. 3. 8, описаны в § 32. На рис. 3.9 приведены наиболее распространенные формы лопастей. Число лопастей гребного винта Z= 2-8 в зависимости от типа судна.В основе геометрии лопастей гребного винта лежит винтовая поверхность. Рассмотрим, как она образуется.
Возьмем горизонтальный отрезок прямой линии BB1= r и будем вращать его равномерно вокруг вертикальной оси 00,
одновременно перемещая его вверх с постоянной скоростью (рис. 3.10). В результате такого сложного движения отрезок BB1 опишет в пространстве винтовую поверхность. Если теперь вокруг оси 00 построить цилиндрическую поверхность радиусом г, то точка Вх опишет на этой поверхности винтовую линию. Отрезок BB1 называется образующей винтовой поверхности.
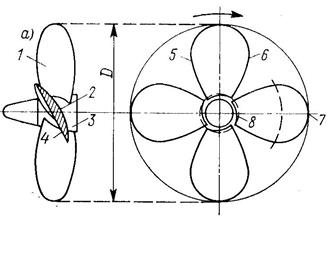
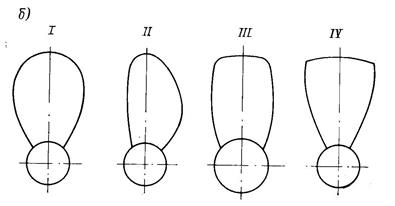
Рис. 3.9. Конструктивные элементы гребного винта (а) и формы контуров лопастей гребных винтов (б)
/ — лопасть; 2 — засасывающая поверхность; 3 — ступица; 4 — нагнетательная поверхность; 5 — выходящая кромка; 6 — входящая кромка; 7 — край лопасти; 8 — корень лопасти. / — симметричный; // — саблевидный; /// — ледокольный; IV — усеченный (Каплана)
В общем случае образующая может быть расположена под любым углом к оси 00, а также может представлять собой отрезок кривой линии.
Если образующая не доходит до оси 00, то при одновременном поступательном и вращательном движении она образует винтовую поверхность в виде винтовой ленты (рис. 3.11). Винтовая лента ограничена двумя цилиндрическими поверхностями, из которых внутреннюю можно рассматривать как стержень, несущий на себе винтовую ленту.
Путь, проходимый любой точкой образующей ВВ1 (см. рис. 3. 10) в аксиальном направлении за один полный оборот вокруг оси 00, называется геометрическим шагом винтовой линии Н.
Рис. 3.10 Образование и развертка винтовой поверхности.
Разрежем цилиндрическую поверхность с прочерченной на ней винтовой линией fiBjDi по вертикальной образующей ED и развернем ее на плоскость. Полученная развертка будет иметь вид прямоугольника ACDE, длина основания которого
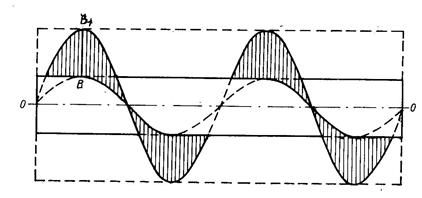
Рис. 3.11 Образование винтовой ленты
равна длине окружности 2Пr, а высота — шагу винтовой линии Н. Если вращение и подъем образующей ВВ1{ происходят с равномерной скоростью, то винтовая линия при этом превратится в гипотенузу AD прямоугольного треугольника ADE, называемого шаговым треугольником. Угол ср при основании треугольника называется шаговым углом, определяемым из соотношения:

При равномерных поступательном и вращательном движениях любой точки образующей получается винтовая линия постоянного шага, у которой шаговый угол сохраняет постоянное значение. Если одно из движений любой точки образующей неравномерно, то шаг винтовой линии получается аксиально-переменным (рис. 3.12). В этом случае при развертке цилиндрической поверхности на плоскость получается неправильная винтовая линия, которая изображается в виде некоторой кривой. Для определения местного шага винтовой линии в какой-либо произвольной ее точке М следует провести в этой точке касательную к кривой и построить шаговый треугольник K.LM, как показано на рисунке.
Рис. 3.12. Развертка винтовой поверхности аксиально-переменного.
Винтовую поверхность, имеющую образующую в виде отрезка прямой линии, перпендикулярной к оси цилиндра, называют правильной, а во всех других случаях — неправильной винтовой поверхностью.
При равномерных вращательном и поступательном движениях образующей любой формы с произвольным углом наклона ее к оси цилиндра получается винтовая поверхность постоянного шага. Если же одно из этих движений неравномерно, то получается винтовая поверхность аксиально-переменного шага, у которой местный шаг винтовых линий, описываемых всеми точками образующей при любом заданном ее положении, сохраняет постоянное значение, но изменяется по мере перемещения образующей в осевом направлении. Для такой поверхности вводят понятие о среднем шаге. Если же винтовые линии, описываемые отдельными точками образующей, имеют постоянный шаг, но на разных радиусах этот шаг различный, то такая винтовая поверхность называется поверхностью радиально-переменного шага. Она получается при поступательном движении отдельных точек образующей в осевом направлении с различными скоростями.
Наконец, могут встретиться винтовые поверхности акси-ально-радиально-переменного шага, у которых каждая винтовая линия имеет переменный шаг, разный на различных радиусах.
Отношение HID шага винтовой поверхности, положенной в основу образования лопасти, к диаметру винта называют шаговым отношением.
Первые гребные винты имели одну лопасть, образованную винтовой поверхностью, получаемой в результате одного полного оборота или даже полутора-двух оборотов образующей вокруг оси винта. Однако практика показала, что более эффективными оказались гребные винты с несколькими лопастями, образован- 
Рис. 3.13. Образование лопасти гребного винта.
ными винтовыми поверхностями при неполном обороте образующей.
Рассмотрим образование одной лопасти гребного винта. Для этого представим себе винтовую ленту постоянного шага Н, расположенную между двумя концентрическими цилиндрическими поверхностями, одна из которых, диаметром d, представляет собой ступицу винта, на которой укреплена лопасть (рис. 3. 13). Диаметр D другой цилиндрической поверхности равен диаметру винта. На винтовой ленте выделим участок abc, ограниченный некоторым криволинейным контуром лопасти. Этот участок может быть изображен в двух проекциях, одна из которых называется нормальной проекцией лопасти (рис. 3. 13,а), а другая — боковой проекцией (рис. 3.13,6).
Под равными углами располагаются на ступице аналогично образованные другие лопасти гребного винта. Правильную винтовую поверхность имеет только нагнетательная сторона лопасти. Поскольку лопасть гребного винта воспринимает гидродинамические силы, измеряемые десятками тонн, она должна обладать достаточной прочностью, т. е. быть телесной. Поэтому засасывающей стороне придают неправильную винтовую поверхность исходя из необходимости обеспечить прочность лопасти и придать удобообтекаемую форму лопастным сечениям.
Рассекая телесную лопасть соосным с винтом цилиндром радиуса г и развертывая контур полученного сечения на плоскость, получаем профиль сечения лопасти на данном радиусе. В зависимости от типа и условий работы винта применяют сегментные, авиационные и клиновидные профили (рис. 3.14). У сегментных профилей наибольшая толщина находится посре-
Рис. 3.14. Профили сечений лопасти гребного винта: а — сегментный; б—авиационный; в — клиновидный.
дине хорды профиля, у авиационных она смещена к передней кромке в район трети хорды профиля. Как сегментные, так и авиационные профили могут быть плоско-выпуклыми, двояковыпуклыми и выпукло-вогнутыми.
В зависимости от направления вращения образующей лопастей гребные винты могут быть правыми и левыми. Если при поступательном перемещении в осевом направлении от наблюдателя образующая вращается по часовой стрелке, то гребной винт называют правым или винтом правого вращения. Если образующая в тех же условиях вращается против часовой стрелки — гребной винт будет левым.
Для быстрого определения направления вращения снятого с вала гребного винта существуют следующие правила: если ось гребного винта горизонтальна, то нужно представить себе винт надетым на вал с одной из лопастей в крайнем верхнем положении и посмотреть на него вдоль оси; если при этом правая кромка верхней лопасти будет дальше от наблюдателя, чем левая, то мы имеем винт правого вращения. Если ось гребного винта вертикальна (винт снят с вала), то при правой кромке лопасти, расположенной выше левой, гребной винт будет правого вращения (смотря в плоскости диска).
Винтовая поверхность имеет двоякую кривизну и не может быть точно развернута на плоскость. Поэтому для приближенной характеристики площади лопасти гребного винта вводят понятия проектированной, развернутой и спрямленной площадей.
Проектированной площадью лопасти называют площадь кривой А1'\С5А1"х, ограничивающей нормальный контур лопасти, т. е. контур проекции лопасти на плоскость, перпендикулярную к оси вращения винта (рис. 3.15).
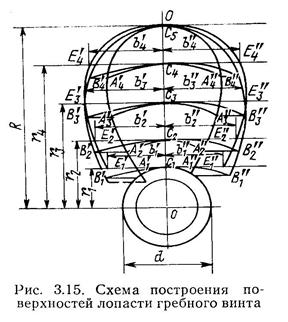
Рассекая нагнетательную поверхность лопасти гребного винта соосными с ним цилиндрами радиусами r1 ,..., г4, получаем отрезки винтовых линий в виде дуг окружностей А1'СА1", ..., A4'CA4". Совместив концы этих дуг с плоскостью чертежа путем поворота на шаговый угол вокруг оси 0—0 и соединив полученные точки В1, ..., В4, ..., В'4, ..., В"1 плавной кривой, получим контур развернутой поверхности лопасти. Заметим, что найденная развернутая поверхность не будет плоской, так как развернутые винтовые линии, так называемые некруговые дуги B'1C1B"1, ..., В4С4В'4, не лежат в плоскости чертежа всеми своими точками.
Спрямив некруговые дуги В1С1В'1, ..., В4С4В4 на касательные к ним в точках С1, С4 и соединив полученные точки Е'1, ..., Е4, Е'4, ..., E"1 плавной кривой, получим контур спрямленной поверхности лопасти, площадь которой приближенно равна истинной площади нагнетающей поверхности лопасти.
Отношение суммарной спрямленной площади всех лопастей гребного винта F к площади диска винта Fp = ПD2/4 называется дисковым отношением Q — F/Fp. У транспортных судов дисковое отношение лежит обычно в пределах 0,3—1,0.
Таким образом, основными геометрическими характеристиками гребного винта являются: диаметр гребного винта D, м (D = 0,5-9,0 м); шаговое отношение H/D = 0,5-2,0); шаг
винтовой поверхности, положенный в основу нагнетательной поверхности гребного вала, Н, м; дисковое отношение  ; площадь спрямленной поверхности лопастей F, м2; число лопастей z(z = 2-f-8); относительный диаметр ступицы dCT/D(dCT/D = 0,14-0,35)
; площадь спрямленной поверхности лопастей F, м2; число лопастей z(z = 2-f-8); относительный диаметр ступицы dCT/D(dCT/D = 0,14-0,35)
§ 20. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ГРЕБНЫХ ВИНТОВ
По конструкции гребные винты, как указывалось, классифицируют на винты фиксированного шага (ВФШ) и винты регулируемого шага (ВРШ). В свою очередь ВФШ делятся на цельные гребные винты, у которых лопасти изготовляются как единое целое со ступицей, и сборные гребные винты, у которых лопасти крепятся к ступице с помощью шпилечного, болтового или любого другого соединения.
В основном на морских судах устанавливаются цельнолитые гребные винты фиксированного шага. Обладая малым значением dci/D(0,14-0,2) они имеют наибольший КПД и наименее трудоемки в изготовлении. Конструктивным недостатком их является то, что при поломке хотя бы одной лопасти дорогостоящий гребной винт полностью выходит из строя.
Учитывая специфику эксплуатации отечественных судов морского флота во льдах, их оборудуют сборными гребными винтами. Эти винты обладают следующими преимуществами перед цельными: при поломке одной или нескольких лопастей они могут быть заменены запасными, даже на плаву; отсутствуют ограничения по габаритным размерам при изготовлении и транспортировке, имеется возможность корректировки шага в процессе изготовления и эксплуатации, при стоянке судов в доке, за счет разворота лопастей относительно их осей. Недостатки сборных гребных винтов заключаются в следующем: неизбежное увеличение dCT/D до значений 0,25—0,3 и, следовательно, уменьшение КПД гребного винта, более высокие трудоемкость и стоимость изготовления вследствие увеличения объема станочной обработки, увеличение массы и момента инерции винта.
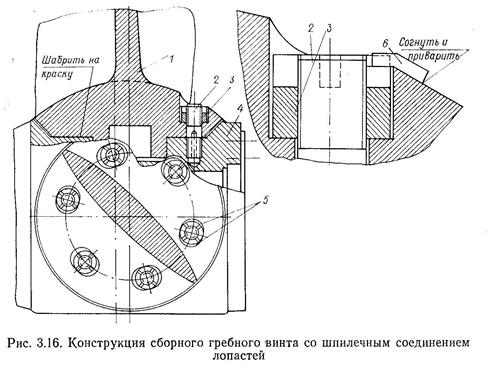
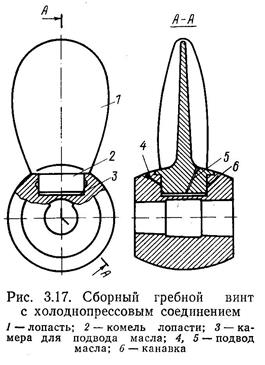
На рис. 3. 16 приведен пример конструкции сборного гребного винта со шпилечным соединением. Лопасть 1 устанавливается в гнездо ступицы 4. В ступицу ввернуты шпильки 2. Отверстия в лопасти под шпильки эллиптические, поэтому между телом лопасти и шпилькой ставят сухари 5, препятствующие вращению лопасти. Лопасти прижимаются к ступице гайками 3, имеющими стопоры 6. На рис. 3.17 представлена конструкция сборного гребного винта с холоднопрессованным соединением лопастей со ступицей, предложенная Н. С. Высокородовым. Комель лопасти у этих гребных винтов охлаждается в среде жидкого гелия при температуре приблизительно минус 170° С, и лопасть устанавливается в гнездо ступицы с гарантированным натягом. Эти гребные винты имеют относительный диаметр ступицы 0,22, близкий к таковому у цельнолитых винтов.
В настоящее время, с развитием нереверсивных среднеоборотных двигателей внутреннего сгорания, на транспортных судах и особенно на буксирных и рыбопромысловых судах широкое применение получили гребные винты регулируемого шага (ВРШ). У таких винтов лопасти могут поворачиваться вокруг
осей своих фланцев, изменяя таким образом шаг винта. Поворот лопастей осуществляется управляемым дистанционно с мостика гидравлическим механизмом, расположенным главным образом внутри полого вала и ступицы гребного винта. В зависимости от изменения нагрузки на гребной винт, вызванной изменением сопротивления воды при буксировке воза или трала, изменением осадки или ветроволновых условий, можно путем установки лопастей на соответствующий шаг в самом широком диапазоне режимов движения судна обеспечить постоянство мощности и частоты вращения главных двигателей. Изменяя шаг лопастей, можно плавно изменять ход судна от самого малого до полного, не управляя режимом работы двигателей. ВРШ позволяют также обеспечить реверс судна, не изменяя направления вращения двигателя, и, следовательно, использовать на судах высокооборотные нереверсивные двигатели. При использовании ВФШ экономические режимы движения могут быть реализованы только путем снижения частоты вращения двигателя, но при этом гребной винт, выбранный из условий обеспечения полного хода судна, становится неоптн-мальным. При установке ВРШ соответствующая блокировка систем управления двигателем и перекладки лопастей по заданной программе обеспечивает оптимальное сочетание шага и частоты вращения. Снижение скорости судна, оборудованного ВРШ, достигается уменьшением шага, реверс — путем установки лопастей на отрицательный шаг. Установка лопастей
на нулевой шаг позволяет остановить судно без остановки двигателя (для высадки или приема лоцмана, пассажиров, портовых властей).
Перечисленные выше и другие преимущества ВРШ объясняют их широкое распространение на судах с переменными режимами движения. Конструктивные особенности современных контейнеровозов и лихтеровозов с малогабаритными среднеоборотными двигателями внутреннего сгорания, широкое внедрение в СЭУ систем автоматики, применение газотурбинных установок обусловили все более широкое распространение ВРШ на судах морского флота.
Наряду с положительными свойствами ВРШ обладают также и рядом недостатков. Повышенный диаметр ступицы, неизбежный ввиду необходимости размещения в ней подшипников заделки лопастей и механизма их поворота, приводит к снижению КПД ВРШ по сравнению с ВФШ в расчетном режиме на 3—4%. Суда с ВРШ обладают повышенной маневренностью, меньшим выбегом при реверсе, чем суда с ВФШ. Однако быстрое изменение нагрузки на гребном валу часто сопровождается изменением знака крутящего момента, что предъявляет особые требования к защите двигателя от перегрузок. ВРШ — сложный механизм, насыщенный оборудованием, трубопроводами, приборами, и это, естественно, увеличивает трудоемкость его обслуживания и ремонта.
Винт регулируемого шага состоит из следующих основных конструктивных элементов: лопастей, ступицы, валопровода, механизма изменения шага (МИШ), силовой части системы
 управления, дистанционной части системы управления. В ступице расположены механизм поворота и (в современных ВРШ) механизм изменения шага. В комплект ВРШ входит также полый гребной вал с системой трубопроводов.
управления, дистанционной части системы управления. В ступице расположены механизм поворота и (в современных ВРШ) механизм изменения шага. В комплект ВРШ входит также полый гребной вал с системой трубопроводов.
МИШ состоит из сервомотора, который создает усилие, требуемое для поворота лопастей, устройства для подвода энергии к сервомотору и устройства, позволяющего управлять положением лопастей.
Силовая часть системы управления служит для подведения энергии к сервомотору и включает маслонасосы с приводами, распределительные золотники, масляные баки, арматуру и пр.
Дистанционная часть управления — регулирующий элемент силовой части. Пост управления ею выносится на мостик.
Лопасти ВРШ крепят болтами к упорному кольцу — одному из элементов подшипника, в котором осуществляется поворот лопасти. Усилие для поворота или удержания лопасти передается от МИШ через кривошипный механизм, жестко связанный с лопастью, и через опорное кольцо или другие конструктивные элементы заделки лопасти. Если в результате аварии нарушается гидравлическая связь между органами управления и МИШ, то по правилам всех классификационных обществ в конструкции ВРШ должно быть предусмотрено устройство, позволяющее переложить лопасти из любого положения на шаг, соответствующий полному переднему ходу судна. Это обеспечивается установкой специальных аварийных пружин в ступице или подачей масла ручными насосами в предусмотренную в ступице полость аварийной перекладки лопастей.
На рис. 3.18 представлена конструктивная схема одного из современных ВРШ, которыми оборудуются суда со среднеоборотными главными двигателями. ВРШ данного типа голландской фирмы ЛИПС установлен на отечественных ролкерах В ступице 3 располагается сервоцилиндр 6 и две полости установки лопастей — переднего А и заднего В хода. Масло высокого давления из расходного бака 23 насосом 25 через фильтры 24 (всасывание) и 26 (нагнетание) и невозвратный клапан 27 подается в нагнетательный трубопровод высокого давления, соединенный с маслораспределительным механизмом 20. Золотник 30 подает масло по зазору между концентрическими трубами и в полость установки лопастей на передний ход (Л) или через сверление во внутренней трубе в полость установки лопастей на задний ход (В). Лопасти устанавливаются в зависимости от того, в какую полость подается масло. Одна из полостей при этом работает на слив в бак 23. Перекладка лопастей осуществляется с помощью сервоцилиндра б, движущегося под давлением масла из полостей переднего или заднего хода. Сервоцилиндр воздействует на палец кривошипа // через опорную шайбу, разворачивая лопасть на заданный с мостика шаг. Для этого с дистанционного пульта 35 воздействуют на управ- 
ляющий золотник 30. В случае аварии гидравлической системы сервоцилиндр посредством поршня аварийной установки смещается в полость переднего хода, перекладывая лопасти в положение полного переднего хода. Обратная связь 32 с указателем установки шага и с системой управления двигателем осуществляется через внутреннюю телескопическую трубу в гребном валу. Смазка деталей ВРШ осуществляется под гидростатическим напором из расходного бака.
Рис. 3.19. ВРШ «тандем;
Из числа перспективных следует отметить также соосные гребные винты (см. рис. 3.2), принцип действия которых изложен в § 34.
У гребных винтов «тандем» лопасти, изготовленные вместе со ступицей, располагаются на ней в двух взаимно параллельных плоскостях. Эти винты очень сложны в изготовлении и поэтому получили лишь ограниченное распространение в судостроении. Исключение составляют ВРШ «тандем», поставляемые голландской фирмой ЛИПС (рис. 3.19).
Дата добавления: 2017-03-12; просмотров: 24212;
Поиск по сайту
Узнать еще
- АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
- Аналитическая геометрия на плоскости и в пространстве.
- Аналитическая геометрия. Прямая и плоскость
- Взаимодействие гребного винта и корпуса судна. Пропульсивный коэффициент
- Взаимосвязь между работой гребного винта и двигателем
- Воздушные винты. Классификация винтов. Аэродинамическая нагрузка винтов. Шаг и поступь винта. Режимы работы винтов. Тяга и мощность винтов
- Геометрические характеристики гребного винта

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
