Кинематический анализ механизмов (аналитический и графический методы).
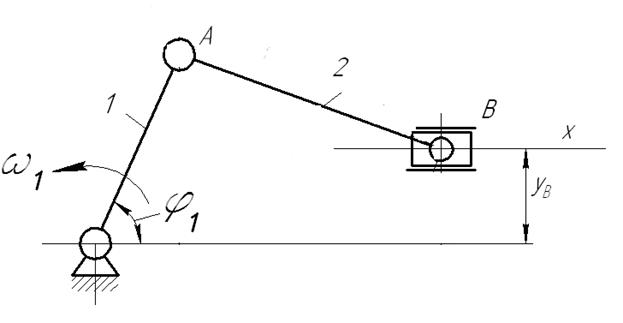
Кинематический анализ кривошипно-ползунного механизма
Аналитический способ
Дано
‑ длины звеньев 
‑ частота вращения кривошипа 
‑ положение кривошипа 
‑ положение В 
Решение:
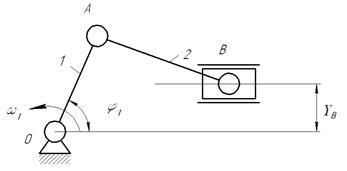
Графический способ
Кинематические характеристики кривошипно-ползунного (и любого другого) механизма могут быть определены и с помощью графоаналитического метода или как его чаще называют метода планов наложений скоростей и ускорений.
Планом механизма называется масштабное графическое изображение кинематической схемы механизма соответствующее заданному положению входного звена.
Планом скоростей механизма называется чертёж, на котором изображены в виде отрезков векторы, равные по модулю и направлению скоростям различных точек механизма в данный момент.
Чертёж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.
Построение плана механизма
Назначаем на плане механизма расстояние ОА (например ОА=50 мм), определяем масштабный коэффициент плана механизма.
Строим план механизма.
Из точки О откладываем под углом φ1 отрезок длиной  .
.
Откладываем горизонтальную прямую, отстоящую на расстоянии  от точки О.
от точки О.
Из точки А делаем циркулем засечку радиусом  на построенной горизонтальной прямой. Получаем точку В.
на построенной горизонтальной прямой. Получаем точку В.
Построение плана скоростей
Ставим на плане скоростей полюс  .
.
Точка А совершает вращательное движение. Определяем скорость точки A.
Скорость точки А направлена перпендикулярно кривошипу 1.
Задаемся на плане скоростей расстоянием  . Определяем масштабный коэффициент для плана скоростей
. Определяем масштабный коэффициент для плана скоростей
Проводим из полюса вектор скорости  длиной
длиной  .
.
Строим скорость точки B.
Точка В принадлежит шатуну 2, совершающему плоскопараллельное движение.
Скорость точки В находится из равенства
Проводим из точки А линию перпендикулярную шатуну 2  , в сторону вращения .
, в сторону вращения .
Кроме этого точка В принадлежит ползуну 3, совершающему поступательное движение вдоль прямой  :
: 
Проводим из полюса линию параллельную прямой х.
На пересечении этих линий будет находиться точка В.
Величина скорости точки будет определяться
Для определения угловой скорости звена 2 мысленно перенесем вектор скорости  на план механизма и направляем угловую скорость
на план механизма и направляем угловую скорость  в сторону вращения .
в сторону вращения .
Модуль угловой скорости звена 3 определяем по формуле
Построение плана ускорений
Ставим на плане скоростей полюс  .
.
Точка А совершает вращательное движение. Определяем ускорение точки A.
Т.к. = const  = 0;
= 0;
Задаемся на плане ускорений расстояние  мм. Определяем масштабный коэффициент для плана ускорений
мм. Определяем масштабный коэффициент для плана ускорений
Откладываем из полюса вектор ускорения  длиной
длиной  от О1 к А.
от О1 к А.
Точка В принадлежит шатуну 2, совершающему плоскопараллельное движение.
Кроме этого точка В принадлежит ползуну 3, совершающему поступательное движение. 
Определяем
Определяем величину этого вектора на плане ускорений
Откладываем из точки А вектор  от В к А.
от В к А.
Величину вектора  определить нельзя (неизвестно угловое ускорение
определить нельзя (неизвестно угловое ускорение  ).
).
Проводим из полюса линию 
На пересечении этих линий находится точка В.
Проводим вектор 
Определяем величину ускорения точки В
Для определения углового ускорения звена 2 мысленно перенесем вектор на план механизма и направляем угловое ускорение  в сторону вращения .
в сторону вращения .
Модуль углового ускорения звена 2 определяем по формуле
Дата добавления: 2017-02-13; просмотров: 3927;
Поиск по сайту
Узнать еще
- Case-study (анализ конкретных ситуаций, ситуационный анализ)
- II Расчет и анализ трехфазных цепей
- II. Качественный контроль (социологический анализ).
- III и IV нейроны слухового пути. Третьи и четвертые нейроны слухового проводящего пути. Ядра слухового анализатора. Признаки поражения слухового пути.
- PGP – ЛУЧШИЙ КРИПТОГРАФИЧЕСКИЙ ПАКЕТ
- VII. Анализ характера
- І. Анализаторы І сигнальной системы
- ІІ. Анализаторы ІІ сигнальной системы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
