Работа следящих систем ГМК-1А
Курсовая система ГМК представляет сбой соединение трех следящих систем:
I ИД - КМ
II КМ - ГА
III ГА – УГР
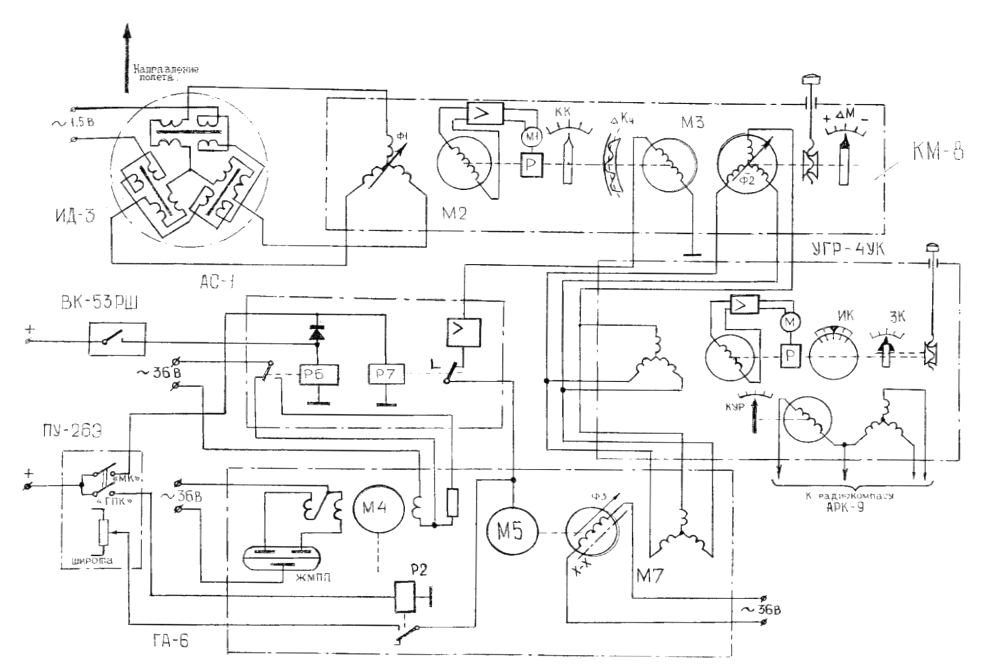
Каждая следящая система имеет свой канал усиления. Усилитель I СС находится в КМ-8, усилитель II СС в автомате согласования С-1 и усилитель III CC находится в УГР.
Работа следящих систем происходит следующим образом.
С трех сигнальных обмоток зондов датчика ИД-3 переменное ЭДС поступает на 3 обмотки статора сельсина М2, образуя переменный магнитный поток Ф1.
Магнитный поток Ф1 пересекая обмотку ротора сельсина М2, индуцирует в ней ЭДС, которая поступает на вход усилителя  . И вызывает ток на его выходе, достаточный для приведения во вращение ротора двигателя М1. Ротор двигателя М1 будет через редуктор Р поворачивать ротор сельсина М2 до тех пор, пока линии его полюсов не займет положение, перпендикулярное к направлению вектора потока Ф1. Стрелка на оси ротора сельсина М2 показывает компасный курс, измеренный зондами датчика ИД-3, так как положение стрелки зависит от направления векторов потока Ф1 и напряженности
. И вызывает ток на его выходе, достаточный для приведения во вращение ротора двигателя М1. Ротор двигателя М1 будет через редуктор Р поворачивать ротор сельсина М2 до тех пор, пока линии его полюсов не займет положение, перпендикулярное к направлению вектора потока Ф1. Стрелка на оси ротора сельсина М2 показывает компасный курс, измеренный зондами датчика ИД-3, так как положение стрелки зависит от направления векторов потока Ф1 и напряженности  3.
3.
Коррекционный механизм КМ-8 имеет лекальное устройство ЛК, которым компенсирует собственную магнитную девиацию ГМК-1А. Это позволяет при различных углах поворота ротора, сельсина М2 получать ротору сельсина М3 соответствующие дополнительные угловые перемещения, которые зависят от прогиба ленты лекального устройства, возникшего при компенсации собственной магнитной девиации курсовой системы ГМК-1А. Таким образом положения ротора сельсина М3 соответствует магнитному курсу воздушного судна.
Поворачивая кремальеру коррекционного механизма КМ-8, можно развернуть статор сельсина М3 относительно корпуса механизма КМ-8 на угол магнитного склонения ΔМ в данном географическом месте. Положения ротора сельсина М3 относительно статора в этом случае будет соответствовать истинному курсу вертолета.
К обмоткам статора сельсина М3 коррекционного механизма от статорных обмоток сельсина М7 гироагрегата поступают 3 ЭДС, определяющие положение оси Х-Х гироскопа в азимуте и создающие в обмотке ротора сельсина М3 переменный магнитный поток Ф2. ЭДС в обмотках сельсина М7 индуцируется переменным магнитным потоком Ф3.
Если положение оси Х-Х оси гироскопа не совпадает с направлением магнитного (или истинного) меридиана, то поток Ф2 индуцирует в обмотке ротора сельсина М3 ЭДС. Это ЭДС поступает на вход усилителя автомата согласования АС-1 и вызывает ток на его выходе, питающий управляющую обмотку коррекционного двигателя М5 (работающего в заторможенном режиме). Момент сил создаваемый двигателем М5 приложен к внутренней раме карданного подвеса, и ось Х-Х прецессирует в азимуте.
Прецессирование гироскопа будет продолжаться до тех пор, пока направление вектора магнитного потока Ф2 (связанного с положением вектора магнитного потока Ф3) не станет перпендикулярным линии полюсов обмотки ротора сельсина М3 коррекционного механизма. В этом случае в роторной обмотке сельсина М3 не будет индуцироваться ЭДС, и коррекционный двигатель М5 работать не будет.
Работа III CC ГА - УГР аналогична.
Дата добавления: 2017-02-13; просмотров: 2271;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
