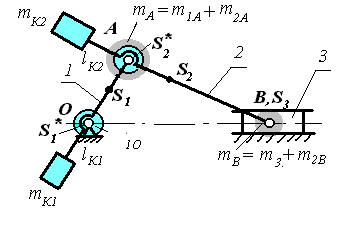
Полное статическое уравновешивание кривошипно-ползунного механизма
|
Дано: l1, l2, lOS1, lAS2;
m1, m2, m3;
S3 совпадает с т. В.
Определить:
mК1, mК2
lК1, lК2
Заменим каждое звено двумя сосредоточенными массами, используя систему уравнений перехода:
Звено 1:  ;
;  ;
;
Звено 2:  ;
;  ;
;
Объединим массы, размещенные в точках А и В:
mА = m1А + m2А, mВ = m2В + m3.
Массу mВ уравновешивают противовесом массой mК2 , определяемой из соотношения: mK2 lK2 = mB l2, (длиной lK2 задаются)
Точка А становиться центром масс уравновешенного звена 2 с массой
m*А = mА + mВ+ mК2 .
Ее уравновешивают корректирующей массой mК1.
 .
.
После установки двух корректирующих масс общий центр масс становиться неподвижным и будет находиться на оси вращения кривошипа вала (в точке О). Точка О в этом случае является центром масс всего механизма, т.е. rSM = 0и mM = m1 + m2 + m3 + mK1 + mK2.
При полном статическом уравновешивании один из противовесов устанавливается на шатуне (звено 2), что резко увеличивает габариты и массу механизма, поэтому применяют частичное (неполное) уравновешивание, добиваясь движения центра масс по специальной (расчетной) траектории.
Дата добавления: 2017-02-13; просмотров: 1489;
Поиск по сайту
Узнать еще
- А. Электростатическое экранирование
- Активное, реактивное и полное сопротивление пассивного двухполюсника
- Антихолинэстеразная теория механизма действия ФОС
- Буддизм: свобода как внутренний уход от жизни, полное отрицание бытия
- Взаимосвязь угла давления и размеров кулачкового механизма.
- Влияние конфигурации самолёта на полное лобовое сопротивление.
- Влияние сечения нулевого провода на потери активной мощности и уравновешивание токов нулевой последовательности
- Вопрос 1. Общая характеристика рыночного механизма.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
