Электрический сигнал
Сигналом называют величину, отражающую состояние какой-либо физической системы. Электрический сигнал – это изменяющаяся во времени физическая величина (ток, напряжение, напряженность электрического или магнитного полей и т.д.), в которой содержится сообщение или информация.
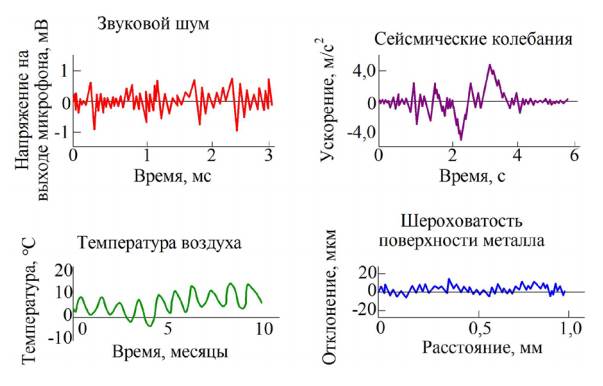
Рис. 1.1.Примеры сигналов.
В процессе преобразования сообщения в электрический сигнал может иметь место модуляция, т.е. управление параметрами некоторой электрической величины. В результате модуляции соответствующий параметр становится функцией времени, а несущая функция превращается в сигнал (см. рис.1.2).
Сигнал - это информационная функция, несущая сообщение о физических свойствах, состоянии или поведении какой-либо физической системы, объекта или среды, а цель обработки сигналов - извлечение сведений, которые содержатся в этих сигналах и преобразование этой информации в форму, удобную для восприятия и использования.
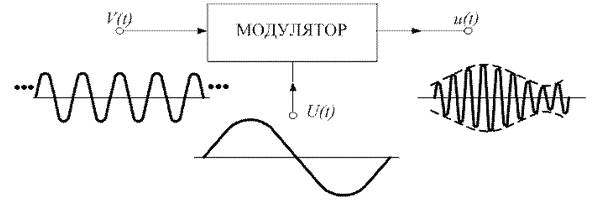
Рис. 1.2. V(t) – несущий процесс, U(t) – модулирующая функция, u(t) – сигнал.
Для выявления общих свойств сигналов их классифицируют по ряду признаков (рис. 1.3). По возможности предсказания мгновенных значений сигналов в любые моменты времени различают сигналы детерминированные и случайные.
По величине интервала времени, в котором существуют отличные от нуля значения сигнала, различают непрерывные и импульсные сигналы.
По повторяемости мгновенных значений сигнала различают периодические и непериодические сигналы.
В зависимости от выбора несущего процесса различают радиосигналы и видеосигналы. Видеосигналы – это такие сигналы, у которых несущими процессами являются постоянные токи и напряжения. Радиосигналы – это такие сигналы, у которых несущими процессами являются гармонические колебания и электромагнитные волны.
Кроме постоянных или синусоидальных токов и напряжений в качестве несущих процессов могут использоваться последовательности видеоимпульсов и радиоимпульсов. Сигналы с такими несущими процессами являются импульсно-модулированными сигналами. В зависимости от того, какой параметр несущего электромагнитного процесса подвергается модуляции, различают:
· амплитудно-модулированные сигналы (АМ);
· частотно- модулированные сигналы (ЧМ);
· фазомодулированные сигналы (ФМ);
· сигналы с широтно-импульсной модуляцией;
· сигналы с частотной модуляцией.
Информативным параметром сигнала может быть частота сигнала, центральная частота и ширина полосы сигнала (если сигнал широкополосный), период повторения сигналов и т.д. Целью обработки при проведении физического эксперимента может быть получение аналитического описания физического процесса, т.е. получение математической модели.
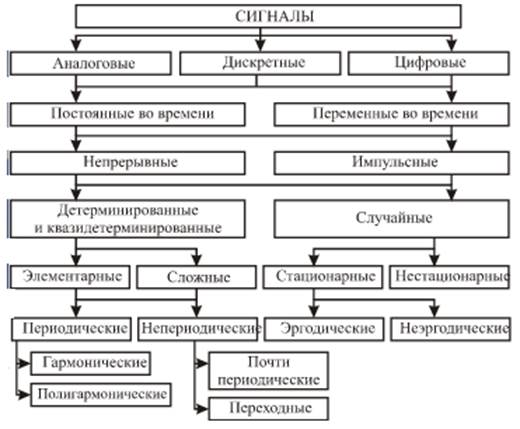
Рис. 1.3. Классификация сигналов
В радиотехнике, радиолокации, электрической связи, в системах и сетях передачи информации, автоматическом управлении целью обработки является получение, передача и обработка информации, содержащейся в сигналах.
Обработка может производиться в аналоговой или цифровой формах.
 Для выполнения обработки в цифровой форме исходный аналоговый сигнал должен быть вначале преобразован в цифровую форму, т.е. представлен в виде серии отсчетов (мгновенных значений сигнала), взятых с некоторой частотой. Операция преобразования сигнала в цифровую форму производится с помощью АЦП. Для того, чтобы по набору цифровых отсчетов можно было восстановить значения измеряемого аналогового сигнала в любой момент времени с требуемой точностью, необходимо правильно выбрать разрядность АЦП и интервал дискретности измерений во времени. Обработку сигналов, представленных в цифровой форме, называют цифровой обработкой сигналов (ЦОС).
Для выполнения обработки в цифровой форме исходный аналоговый сигнал должен быть вначале преобразован в цифровую форму, т.е. представлен в виде серии отсчетов (мгновенных значений сигнала), взятых с некоторой частотой. Операция преобразования сигнала в цифровую форму производится с помощью АЦП. Для того, чтобы по набору цифровых отсчетов можно было восстановить значения измеряемого аналогового сигнала в любой момент времени с требуемой точностью, необходимо правильно выбрать разрядность АЦП и интервал дискретности измерений во времени. Обработку сигналов, представленных в цифровой форме, называют цифровой обработкой сигналов (ЦОС).
Методами ЦОС являются алгоритмы цифровой фильтрации, спектрально-корреляционного анализа, модуляции и демодуляции сигналов, адаптивной обработки и др. [1-3]. Алгоритмы ЦОС, в отличие от других вычислений на ЭВМ, предусматривают, как правило, их выполнение в реальном масштабе времени.
Средствами реализации ЦОС программируемые логические интегральные схемы (ПЛИС), микропроцессоры общего назначения, микроконтроллеры, цифровые сигнальные процессоры (ЦСП). Последние аппаратно и программно оптимизированы на задачи ЦОС и образуют ее специализированную элементную базу. В режиме off line ЦОС может выполняться с помощью готовых компьютерных программ, представленных наиболее полно в MATLAB [4, 5]
Примером задачи ЦОС и средств ее решения может быть задача обнаружения и определения в реальном времени параметров радиолокационного линейно частотно модулированного (ЛЧМ) спутникового сигнала. Общая структура системы радиотехнического контроля радиолокационных спутниковых сигналов показана на рис. 1.5.
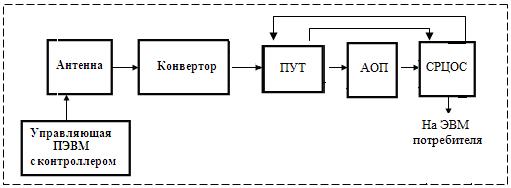
Рис. 1.5. Структура системы радиотехнического контроля радиолокационных
спутниковых сигналов. ПУТ-приемно-усилительный тракт, АОП-акустооптический
процессор, СРЦОС – система регистрации и обработки сигналов.
Акустооптоэлектронный процессор преобразует поток ЛЧМ-сигналов в поток мгновенных спектров [6, 7]. На СРЦОС поступает поток мгновенных спектров, элементные и кадровые сигналы синхронизации .
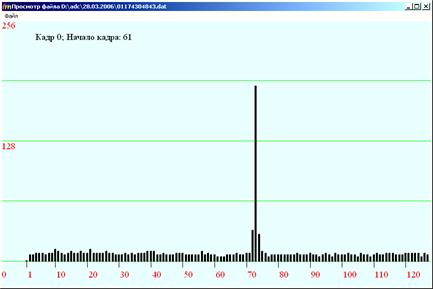
Рис. 1.6. Вид кадра, содержащего один элемент спектра ЛЧМ-сигнала
Один ЛЧМ-сигнал занимает несколько (например, 8-10) кадров. Чтобы получить ЛЧМ-сигнал, нужно обнаружить последовательно идущие кадры, содержащие элементы ЛЧМ-сигнала и просуммировать их. В результате будет получен сигнал, содержащий несколько (например, 8) последовательно расположенных линий спектра.
Основными задачами цифровой обработки является обнаружение в реальном времени ЛЧМ-сигналов в условиях шумов и помех и определение параметров ЛЧМ-сигнала, таких как центральная частота, полуширина спектра и амплитуда. Структура системы регистрации и цифровой обработки сигналов (СРЦОС) приведена на рис. 1.7.
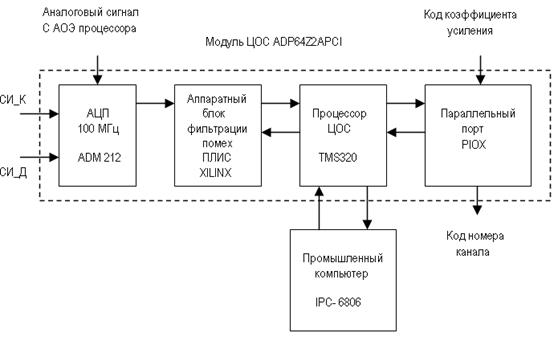
Рис. 1.7. Структура СРЦОС. СИ_К- синхроимпульс кадра, СИ_Д – синхроимпульс данных (элементный синхроимпульс)
.
В процессе цифровой обработки решается несколько задач:
1. Фильтрация шумов и помех в потоке данных.
2. Обнаружение информативных сигналов в потоке данных и определение их параметров: центральной частоты, полуширины спектра и мощности.
3. Анализ параметров обнаруженных сигналов с целью исключения возможности ошибочного принятия сигнала помехи за информативный сигнал.
4. Передача параметров информативных сигналов на удаленный компьютер.
Предварительная обработка данных, требующая высокой скорости выполнения, реализована в ПЛИС. На этапе предварительной обработки производится фильтрация помех (п.1) и формирование 32-х битных отсчетов содержащих амплитуду сигнала, индекс в кадре и номер кадра для исключения из дальнейшей обработки неинформативных данных (п.2). Информативными считаются сигналы, превышающие пороговый уровень и не совпадающие с «картой помех». В «карте помех» сохраняется частотный диапазон структурно-детерминированных (станционных) помех, определенный непосредственно перед приемом спутникового сигнала.
Последовательность обработки информационного потока данных иллюстрируется на рис. 1.8.
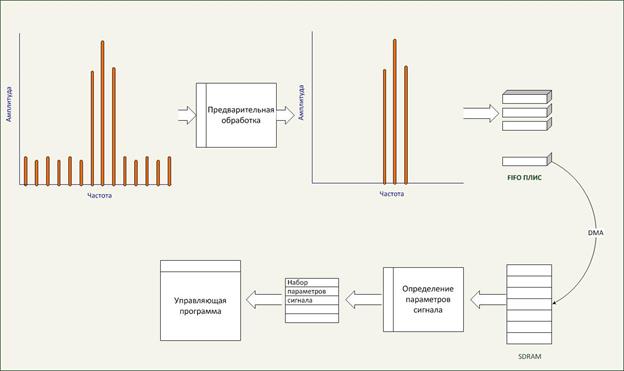
Рис. 1.8. Последовательность обработки информационного потока данных
Другие примеры задач реального времени, решаемых с помощью систем ЦОС:
Обнаружение и определение параметров:
1. Донных сигналов электромагнитно-акустических толщиномеров;
2. Эхо-сигналов спектрометров ЯКР.
В задаче обнаружения и определения параметров донных сигналов электромагнитно-акустических (ЭМА) толщиномеров необходимо измерение времени прохождения ультразвукового импульса, порождаемого радиоимпульсом, через металлическое изделие. Таким способом определяется тощина металла. ЭМА-толщиномеры используются в атомной промышленности для контроля толщины металлических конструкций и для измерения толщины нефтегазовых труб в процессе эксплуатации. Пример вида зашумленных донных сигналов ЭМА-толщиномера приведен на рис.1.9.
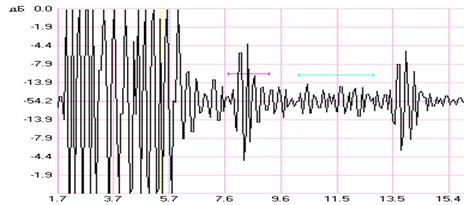
Рис. 1.9.Фрагмент сигнала датчика (электромагнитно-акустического преобразователя) ЭМА-толщиномера
Определение толщины металла производится по расстоянию между центрами отраженных (донных) сигналов или по величине задержки отраженного радиоимпульса относительно зондирующего. Простейшим способом можно определить положение центров по максимумам отраженных сигналов. Структура типового ЭМА-толщиномера А1270 приведена на рис. 1.10.
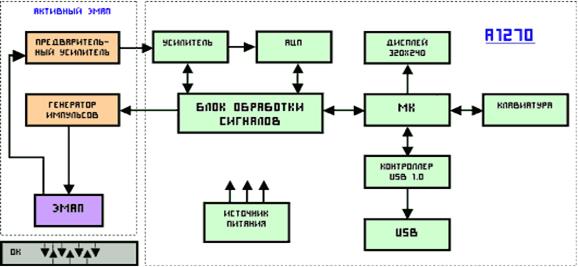
Рис. 1.10. Структура аппаратной части ЭМА-толщиномера А1270.
Алгоритмы ЦОС, позволяющие определять более точно временную задержку отраженного радиоимпульса относительно зондирующего будут рассмотрены далее.
Блок обработки сигналов выполнен на базе ПЛИС и/или сигнального процессора.
Для решения основной задачи ЦОС – обнаружения информативных сигналов в условиях шумов и помех и определения их параметров, - применяются:
§ аппроксимация сигналов;
§ цифровая фильтрация;
§ функциональные преобразования;
§ спектрально-корреляционный анализ и другие методы ЦОС.
Создание систем ЦОС включает:
1. Разработку алгоритма ЦОС для выполнения решаемой задачи.
2. Высокоуровневую программную реализацию алгоритма (MATLAB) для моделирования процесса цифровой обработки и оценки эффективности разработанного алгоритма.
3. Низкоуровневую программную реализацию алгоритма ( С/С++).
4. Аппаратно-программную реализацию алгоритма ( VHDL, Verilog).
5. Аппаратную (ПЛИС, цифровые сигнальные процессоры, ПЛИС со встроенным аппаратным ядром ARM).
Дата добавления: 2017-01-16; просмотров: 13729;
Поиск по сайту
Узнать еще
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- IV. Сигналы ограждения на железнодорожном транспорте
- IX. Звуковые сигналы на железнодорожном транспорте
- LI. СВЯЗЬ И СИГНАЛИЗАЦИЯ
- V. Ручные сигналы на железнодорожном транспорте
- VI. Сигнальные указатели и знаки на железнодорожном транспорте
- VII. Сигналы, применяемые при маневровой работе
- VIII. Сигналы, применяемые для обозначения поездов, локомотивов и другого железнодорожного подвижного состава

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
