ЭТАПЫ РАЗВИТИЯ РАДИОТЕХНИКИ
Фарадей Майкл (1781-1867) − английский физик, основатель современного учения об электромагнитных явлениях, открыл явление электромагнитной индукции, законы электролиза, заложил основу современных представлении об электромагнитном поле. В 1832 г. он высказал мысль о том, что распространение электрической магнитной сил − явление колебательное и происходит с конечной скоростью.
Максвелл Джеймс Клерк (1831−1879) − английский физик, создавший на основе учения Фарадея стройную математическую теорию электродинамики, объясняющую все известные в то время, а также многие открытые впоследствии электромагнитные явления. Он предсказал существование свободных электромагнитных волн, вычислил скорость их распространения (300 000 км/с) и выдвинул гипотезу об электромагнитной природе света.
Герц Генрих Рудольф (1857−1894) − немецкий физик, экспериментально исследовавший свойства электромагнитных волн и блестяще подтвердивший теорию Максвелла. Он разработал теорию излучения воли с помощью элементарного вибратора (вибратор Герца), которая легла в основу современной теории антенн.
Однако никто из предшественников А. С. Попова даже не ставил задачу практического использования электромагнитных волн. Первый приемник А. С. Попова − грозоотметчик − был предназначен для регистрации грозовых разрядов. Он, состоял из антенны, когерера и электрического звонка. Когерер − ампула с металлическими опилками, сопротивление которых уменьшается под воздействием электромагнитной волны, − прообраз детектора. Таким образом, уже грозоотметчик А. С. Попова содержал все необходимые элементы приемника: антенну, детектор и воспроизводящее устройство. Демонстрация этого приемника состоялась 7 мая 1895 г. В дальнейшем А. С. Попов существенно усовершенствовал свой приемник, снабдив его телеграфным аппаратом, что позволило осуществить радиотелеграфную связь, используя искровой передатчик с вибратором Герца. Радиостанциями конструкции А. С. Попова оборудовались корабли русского флота. Уже в 1900 г. начала работать первая в мире линия радиосвязи, дальность связи которой достигала 45 км. А. С. Попову принадлежит ряд таких важнейших изобретений в области радио, как использование электрического резонанса для повышения чувствительности приемника, открытие (совместно с П. Н. Рыбкиным) возможности приема телеграфных радиосигналов на слух, открытие явления отражения радиоволн от кораблей, которое легло в основу радиолокации, и ряд других.
Доламповый период в истории радиотехники (три десятилетия с момента изобретения радио) характеризуется развитием телеграфной радиосвязи, дальность которой увеличивалась в основном за счет наращивания мощности передатчиков.
Искровые передатчики вырабатывали сигнал в виде серии затухающих колебаний, которые создавали значительные помехи в широком диапазоне частот, что значительно затрудняло избирательный прием.
Дуговые передатчики создавали незатухающие колебания и значительно меньшие помехи, однако они могли работать только на длинных и средних волнах и были неудобны в эксплуатации.
Электромашинные передатчики успешно конкурировали с дуговыми, были более надежны и экономичны.
В разработке электрических машин высокой частоты большую роль сыграли работы члена-корреспондента АН СССР В. П. Вологдина. После того как машинные передатчики были вытеснены ламповыми, В. П. Вологдин разработал методы использования и внедрения их в ряд отраслей народного хозяйства, положив начало промышленной электронике.
Электронные лампы начали внедряться в радиотехнику в начале 20-х годов. Малая инерционность, удобство управления анодным током, возможность получения больших мощностей и ряд других достоинств электронных ламп позволили создать ламповые передатчики, которые в короткий срок вытеснили из радиотехники искровые, дуговые и электромашинные передатчики, и высококачественные приемники на принципиально новой основе. Именно благодаря электронным лампам оказалось возможным освоить диапазоны KB и УКВ, осуществить телефонную радиосвязь, телевидение, радиолокацию, создать РПДУ мощностью более 1000 кВт и РПУ чувствительностью в дол микровольта, обеспечить радиосвязь на неограниченные (в пределах Земли) расстоя ния; внедрить электронно-вычислительную и другую электронную технику.
В нашей стране работы по созданию электронных ламп и строительству первы ламповых радиостанций были широко развернуты в Нижегородской радиолаборатории, организованной в 1918 г. Первый концерт по радио, положивший начало радиовещанию, был передан из Нижнего Новгорода в 1923 г. Большой вклад в развитии радиотехники в этот период внесли отечественные ученые.
Бонч-Бруевич Михаил Александрович (1888−1940) (член-корреспондент А СССР) с 1918 г. руководил Нижегородской радиолабораторией, в которой разрабаты вались мощные генераторные лампы с водяным охлаждением анода и радиовещательные станции.
Шулейкин Михаил Васильевич (1884−1939) (академик) − организатор первой нашей стране московской школы радноспециалистов. Его основные исследования от носятся к области антенн, распространения радиоволн, электронных ламп, ламповы генераторов и приемников.
Мандельштам Леонид Исаакович (1879−1944) (академик) работал в области оп тики и радиофизики. Совместно с Н. Д. Папалекси возглавил школу советских ради физиков, разработавших теорию нелинейных колебаний. Им проведены фундамен тальные исследования в области распространения радиоволн, параметрнческо возбуждения колебаний, радиоинтерференциониого метода измерения расстояний.
Папалекси Николай Дмитриевич (1880−1947) (академик) с 1914 г. работал области создания электронных ламп, впервые в России осуществил телефонную ра диосвязь, внес большой вклад в разработку проблем нелинейной радиотехники, квар цевой стабилизации частоты, селективного приема, изобрел радиопеленгатор.
Введенский Борис Алексеевич (1893−1969) (академик) занимался теорией ра пространения радиоволн, а также получил расчетные формулы для условий распро странения УКВ.
Минц Александр Львович (1895−1974) (академик) − разработал мощные РПД Под его руководством построены мощнейшие радиовещательные станции, а такж ускорители элементарных частиц.
Академик Берг Аксель Иванович (1893−1979) разработал теорию и методы ра чета ламповых генераторов, руководил строительством ламповых радиостанций, возглавлял работы по радиолокации, кибернетике, вычислительной технике.
Наиболее характерным признаком современного периода развития радиоэлектроники можно считать резкое расширение сферы ее применения. Начало этого перио следует отнести к 40-м годам, когда потребности ПВО и навигации стимулировал быстрое развитие радиолокации, что, в свою очередь, потребовало разработки техник дециметровых и сантиметровых волн, на которых радиолампы и колебательные кон туры уже не могли работать. Происходит техническое перевооружение, появляютс такие новые электронные приборы, как клистроны, магнетроны, лампы бегущей волны, а также новые колебательные системы − объемные резонаторы и новые систем передачи энергии − волноводы. Значительные успехи в области радиолокации − с здание мощных импульсных передатчиков, остронаправленных антенн, сверхчувстви тельных приемников −: сделали возможным развитие радиоастрономии и космическо радиоэлектроники. Так, радиолокационный комплекс, разработанный под руководством академика Владимира Александровича Котельникова, обеспечивает радиолокацию Венеры. Отраженные с расстояния более 100 млн км сигналы уверенно воспринимаются приемником, реагирующим на мощность сигнала порядка  Вт.
Вт.
В тесной связи с радиолокацией развивалась и кибернетика − наука об управлении. Первые кибернетические задачи возникли как задачи управления локационными системами. Развитие кибернетики, в свою очередь, стимулировало разработку современных средств обработки информации − ЭВМ, которые в короткое время превратились в мощнейший двигатель науки, экономики, технологии.
Следующий шаг вперед в развитии радиоэлектроники − широкое внедрение полупроводниковых приборов (ППП), ставшее возможным благодаря успехам физики твердого тела и потребовавшее полного технического перевооружения электронной промышленности. Транзисторизация позволила резко снизить габаритные размеры и массу, повысить экономичность аппаратуры, что особенно важно для ЭВМ, авиации и космонавтики.
Дальнейшее развитие в этом направлении привело к созданию микромодулей, а затем интегральных микросхем, в которых "плотность упаковки" микроэлементов составляет 1 млрд на 1 дм . Экономичность и надежность таких схем в тысячи раз выше ламповых. Например, как показали испытания, аппаратура на интегральных схемах может работать в течение 80 млн схемочасов без единого отказа.
Наконец, современный период характеризуется дальнейшим расширением диапазона используемых частот. Освоение инфракрасных волн сделало возможным "тепловое видение" − обнаружение объектов по слабому тепловому излучению.
Изобретение лазеров, в частности работающих в оптическом диапазоне, открыло новую научно-техническую область − оптическую радиоэлектронику, которая имеет феноменальные возможности. Например, лазерный локатор измеряет расстояние до Луны с точностью до нескольких сантиметров. Лазерная линия связи "пропускает" одновременно 1 млн телефонных каналов. Лазерный луч "выбивает" отдельные атомы из "длинных" органических молекул, избирательно изменяя их свойства. Лазерная юлография позволяет получать объемные изображения, не отличимые от оригинала. Наша наука занимает в этой области ключевые позиции. Не случайно из трех ученых, которым были присуждены Нобелевские премии за работы в области лазеров, двое − академики Н. Г. Басов и А. М. Прохоров − наши соотечественники.
ВЫВОДЫ
В основу радиотехники положено три принципа: использование радиоволн, применение колебаний радиочастоты н управление радиочастотными колебаниями, в результате которого формируется радиосигнал.
Эти принципы реализуются в канале радиосвязи, состоящем из РПДУ и РПУ.
Линией связи является свободное пространство.
Осуществление радиосвязи стало возможным в результате решения ряда научно-технических задач, которые могут быть сформированы как учебные проблемы, подлежащие решению.
Основные применения радиотехники − это радиовещание и телевидение, радиосвязь, радионавигация и радиолокация, радиотелеметрия и радиоуправление, радиоастрономия. Еще более широк диапазон применения радиоэлектроники. Радиотехника и электроника превратились в один из решающих факторов научно-технического и культурного развития современного общества.
Лекция № 2
Тема лекции:
«Радио в гражданской авиации. Классификация сигналов. Основные характеристики и параметры сигналов»
План лекции
Оптическое изображение и особенности восприятия 2
Литература
Е. А. Москатов Основы телевидения, 2005р. - 162 с
Глава 2. РАДИО В ГРАЖДАНСКОЙ АВИАЦИИ
2.1. РАДИОТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОЛЕТОВ
Управление воздушным движением (УВД) заключается в целом комплексе мероприятий по планированию, координированию и руководству движением воздушных судов (ВС) в едином воздушном пространстве. Управление полетами всех гражданских ВС осуществляется централизованно. Аэрофлот имеет единую систему организации, планирования н координирования воздушного движения над территорией страны.
Воздушное пространство делится на нижнее и верхнее. Как в плане, так и по высоте оно подразделено на районные центры (РЦ), которые включают воздушные трассы, районы подхода, районы аэродромов и зоны местных воздушных линий (МВЛ). В район аэродрома входят воздушные коридоры, зоны ожидания, круга, взлета и посадки.
На воздушных трассах и в зонах аэродромов поддерживается определенный порядок движения, регламентируемый рядом правил. Управление воздушным движением осуществляют районные центры единой системы УВД, относящиеся к службе движения
гражданской авиации.
Диспетчеры, руководящие движением, пилотируемые ВС, взлетно-посадочные полосы (ВПП) с рулежными дорожками (РД), радиосветотехнические средства обеспе чення полетов, регламентированное воздушное пространство с переменными метеоус ловиями, комплекс бортовых и наземных технических средств − все это звенья слож
ной динамической системы.
Пилоты и диспетчеры являются главными фигурами в этой системе. Пилот командуе экипажем и управляет BQ наблюдает за метео- и воздушной обстановкой; контролирует приборам работу силовых установок; наблюдает за показаниями пилотажно-навнгационны приборов, одновременно выполняя пилотажные задачи; поддерживает радиосвязь с диспет мерами, передавая им и получая от них информацию, оперативно изменяет программу полет при сложных условиях полета (обходе опасных метеоусловий, закрытии аэропорта, уходе второй круг) и т. д.
Диспетчер непрерывно контролирует режимы полета ВС в воздушном пространстве; передает на борт и получает с борта информацию о выполнении оперативных команд; логически прогнозирует развитие воздушной обстановки в контролируемой зоне; следит за метеоусловиями; собирает и хранит в памяти огромное количество динамической и статической информации − о воздушной обстановке, схемах захода на посадку, состоянии ВПП, числе и очередности готовых к вылету ВС, наземных высотных препятствиях, взлетно-посадочных характеристиках ВС, об эксплуатационных возможностях радиотехнических систем обеспечения полетов и др.
Источником динамической информации о воздушной обстановке в контролируемой зоне в основном являются радиотехнические системы обеспечения полетов. Статическая информация заложена в схемах, таблицах, памяти ЭВМ, наставлениях, инструкциях и т. д.
Диспетчеры различных зон УВД выполняют следующие функции. Диспетчер руления руководит движением ВС по перрону, передает ВС диспетчеру стартового диспетчерского пункта (СДП) в месте предварительного старта (50... 100 м от ВПП), включает огни освещения РД и светофоры, принимает ВС после посадки (освобождения ВПП).
Диспетчер СДП руководит движением ВС при выруливании на ВПП, взлете и наборе высоты до 200 м, сообщает экипажу направление взлета, его условия и порядок выполнения послевзлетного маневра.
Диспетчер посадки обеспечивает заход ВС на посадку и дает разрешение командиру ВС на ее выполнение, по индикатору посадочного радиолокатора (ПРЛ) контролирует положение ВС и при необходимости дает команду о его коррекции или уходе ВС на второй круг.
Диспетчер круга руководит полетами ВС в ближней приаэродромной зоне: при взлете − от высоты 200 м до рубежа передачи диспетчеру подхода на высоте второго эшелона и расстояния до 30 км; при полете − от высоты второго эшелона на траектории снижения и захода на посадку (или ожидания) до последнего разворота на высоте 400 м. Контроль положения ВС ведется по индикаторам диспетчерского радиолокатора (ДРЛ).
Диспетчер подхода управляет движением ВС в своем секторе подхода к аэродрому с момента пересечения границы зоны подхода (100 км) до границы ближней зоны (  30...40 км) при прилете и в обратном направлении при вылете. Для контроля используются индикаторы ДРЛ или радиотехнической системы ближней навигации (РСБН).
30...40 км) при прилете и в обратном направлении при вылете. Для контроля используются индикаторы ДРЛ или радиотехнической системы ближней навигации (РСБН).
Диспетчеры районных центров управляют движением ВС по трассам в верхнем воздушном пространстве (выше 6100 м) и дальше 300 км. Для контроля используются индикаторы обзорных радиолокаторов (ОРЛ) с большим радиусом действия.
Диспетчеры вынесенных радиолокационных диспетчерских пунктов (ВРДП) обеспечивают радиолокационный контроль на участках, взаимоудаленных на 250...300 км и расположенных таким образом, чтобы рабочие зоны радиолокаторов перекрывали всю грассу. Как правило, информация от ВРДП по линиям связи передается диспетчеру РЦ.
Диспетчер местного диспетчерского пункта (МДП) осуществляет контроль и руководство движением ВС на местных воздушных линиях. Такие полеты производятся н дневное время при видимости не менее 2 км, с интервалами между ВС не менее 30 км на высоте 50... 100 м.
Комплекс наземных радиосредств, обеспечивающих диспетчеров и экипажи ВС информацией, необходимой для УВД, объединяется в аэропортах в единую службу, которая называется базой эксплуатации радиотехнического оборудования и связи (ЭРТОС). По выполняемым функциям радиоэлектронное оборудование (РЭО) сгруппировано в узле радионавигации и узле связи. Состав, размещение и индикаторы РЭО показаны на рис. 2.1. Рабочие места диспетчеров, расположенные в основном на командно-диспетчерском пункте (КДП), оборудованы электронно-лучевыми индикаторами и пультами дистанционного управления соответствующим РЭО, связанными с удаленными объектами кабельными линиями и радиосвязи.
Узел радионавигации состоит из радиолокационных и радиомаячных систем. В свою очередь, радиолокационные системы состоят из обзорных, диспетчерских и посадочных радиолокаторов.
Обзорные радиолокаторы предназначены для обнаружения ВС в контролируемых зонах и определения их азимута (угла между направлениями на север и ВС) и наклонной дальности до ВС. Они позволяют диспетчеру контролировать выдерживание ВС установленных маршрутов, расписания полетов, интервалов между ВС, обнаруживать очаги опасной грозовой деятельности и их перемещение. Они, работая в активном режиме с самолетными ответчиками (см. § 2.3), позволяют определять государственную принадлежность ВС и получать данные о бортовом номере, высоте ВС и остатке горючего. Дальность действия ОРЛ достигает 500 км (при высоте полета 25 км), а точность определения координат по дальности составляет 800 м, а по азимуту − 30'.
Диспетчерские радиолокаторы определяют ту же информацию о ВС в зонах подхода и круга. От ОРЛ они отличаются большей точностью на малых расстояниях, а также способностью исключать помехи от неподвижных отражающих объектов (так называемой селекцией подвижных целей).
Посадочные радиолокаторы обеспечивают контроль диспетчером посадки траектории снижения ВС. На экране индикатора ПРЛ (см. рис. 2.1) нанесены в логарифмическом масштабе проекции заданной траектории снижения на вертикальную плоскость − глиссады и на горизонтальную − линии курса, линии равных отклонений и линии дальности от точки касания. Отметки положения ВС − светящиеся точки − при точном снижении должны совпадать с глиссадой и линией курса. Кроме того, на индикаторе имеется цифровая индикация азимута и угла места.
Радиомаячные системы работают в комплексе с радионавигационными устройствами ВС. Они состоят из (см. рис. 2.1) ближнего и дальнего приводных и маркерного радиомаяков (БПРМ, ДПРМ и МРМ), курсового (КРМ) и глиссадного (ГРМ) радиомаяков системы инструментальной посадки и маяка радиотехнической системы ближней навигации (РСБН) и описЗны в § 2.3 совместно с бортовыми устройствами.
Автоматический радиопеленгатор (АРП) позволяет измерять азимут ВС путем определения направления, из которого поступают сигналы работающего бортового РПДУ. I
Узел связи объединяет сети воздушной и наземной авиационной электросвязи. Сеть воздушной радиосвязи по линиям "Земля − борт" содержит приемопередающие наземные и бортовые радиостанции командной связи, работающие в диапазоне MB, и дальней связи − в диапазоне ДкМВ. Первые используются для ближней связи на расстоянии до 350 км между командиром ВС и диспетчерами в телео>онном режиме, I вторые − для дальней связи в телефонном или телеграфном режиме.
Сеть наземной связи по линиям " Земля − Земля" наряду с радиолиниями раз-1 личных диапазонов использует радиорелейные и кабельные линии связи, по которым кроме сигналов связи передаются большие массивы информации в двоичном коде, обрабатываемые в ЭВМ.
Автоматизированные системы УВД (АСУВД) разрабатываются и внедряют для повышения безопасности и интенсивности воздушного движения за счет автома-тизации управления им.
Входящие в систему управления ЭВМ позволяют обрабатывать полетную информацию поступающую от РЭО, и предоставлять ее диспетчеру в удобной для использования символьно-числовой форме, тем самым избавляя его от рутинной работы по обработке информации и ведению связи.
В настоящее время в Аэрофлоте используются две разновидности АСУВД "Старт" и ТЕРКАС. Каждая из систем охватывает обширный район, включающий аэропорты с интенсивным воздушным движением. На электронном индикаторе воздушной обстановки диспетчера движущимися символами на фоне схемы района обозначен отметки от ВС, направления их движения и буквенно-цифровые данные о них (см. рис 2.7). Кроме того, на таблично-знаковом индикаторе содержится полная информация всех ВС и другие данные, необходимые диспетчерам руления и старта. Дальнейши] развитием АСУВД является система "Стрела", объединяющая все АС крупного региона и обеспечивающая возможность управления им из единого центра.
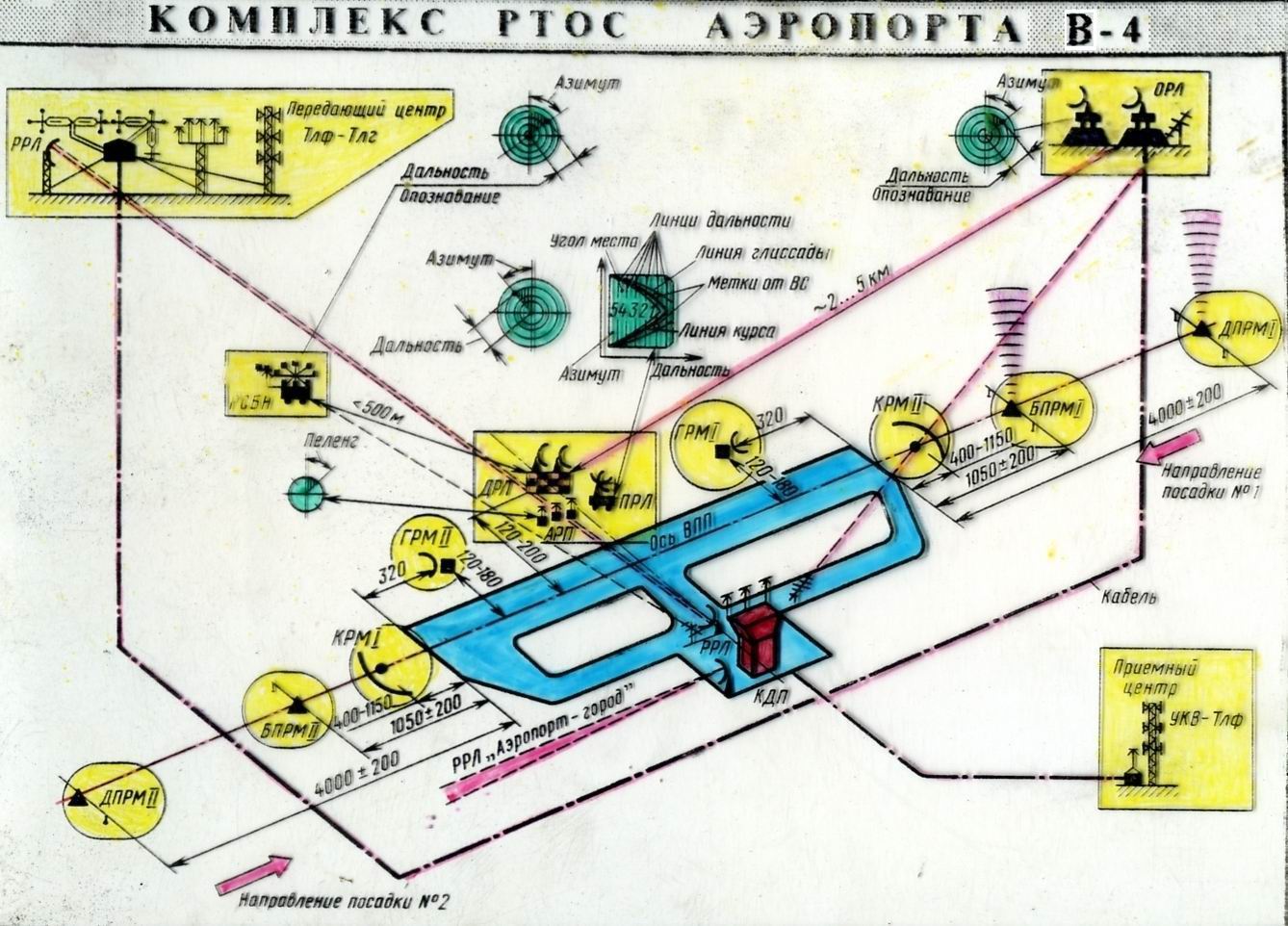
Рис. 2.1
2.2. БОРТОВОЕ РАДИООБОРУДОВАНИЕ СВЯЗИ
Радиоэлектронное оборудование современного воздушной судна − это сложный комплекс устройств и систем, обеспечивающий решение задач самолетовождения и связи и играющий важнейшую роль в обеспечении безопасности и регулярности полетов. В зависимости от назначения и используемых принципов РЭО принято делить на три группы: радиооборудование связи (РОС), радионавигационное оборудование (РНО) и радиолокационное оборудова ние (РЛО).
Группа РОС обеспечивает внешнюю и внутреннюю связи экипажа, вчутрибортовое вещание и запись речевой информации.
Связная радиостанция (СРСТ) (рис. 2.2) предназначена для дальней телефонно-телеграфной радиосвязи экипажа с наземными самолетными радиостанциями. Она состоит из РПДУ, РПУ и ан тенны, работает в диапазоне дека- и частично гектометровых волн и имеет автоматическое управление. В зоне дальней связи используются отраженные от ионосферы лучи радиоволн, которые действуют начиная с расстояния в сотни километров от РПДУ. Максимальная дальность зависит от мощности РПДУ и выбора рабочей волны и, как правило, превышает дальность беспосадочного полета. В СРСТ используются радиосигналы с амплитудным управлением. Командная радиостанция (КРСТ) (рис. 2.3) обеспечивает телефонную связь командира корабля с диспетчером при полете по трассе и в приаэродромной зоне. Работает она в диапазоне метровых волн, дальность связи D (км) ограничивается пределами прямой видимости (зона ближней связи) и зависит от высоты Н (м) полета (  ). При высоте 10 000 м предельная дальность связи около 350 км. В КРСТ используются АМ-радиосигналы.
). При высоте 10 000 м предельная дальность связи около 350 км. В КРСТ используются АМ-радиосигналы.
Самолетное переговорное устройство (СПУ) предназначено для внутрибортовой телефонной связи между членами экипажа и выхода любого из них на внешнюю радиосвязь. Состоит оно из усилителя звуковых частот и абонентских аппаратов, позволяющих подключать авиагарнитуру (микрофон и телефон) каждого члена экипажа к любому каналу связи.
Самолетное громкоговорящее устройство (СГУ) обеспечивает инутрибортовое вещание в пассажирских салонах. Состоит оно из Усилителя звуковой частоты и системы громкоговорителей и используется бортпроводником для объявлений и трансляции музыкальных программ.
Самолетное магнитофонное устройство (СМУ) обеспечивает автоматическую запись в полете речевой информации, поступающей по каналам внешней и внутрибортовой связи. Кроме входящего в состав авиационного оборудования МС на борту установлены многоканальные магнитофонные устройства (МСРП) для записи информации о режиме полета и работе основных систем ВС, которая расшифровывается после каждого полета.

2.3. БОРТОВОЕ РАДИОНАВИГАЦИОННОЕ ОБОРУДОВАНИЕ
Группа РНО, работая в сочетании с наземными радиомаяками, обеспечивает экипаж и систему автоматического управления ВС (САУ) навигационной информацией, позволяющей осуществлять самолетовождение и посадку в любых метеоусловиях.
Автоматический радиокомпас (АРК) (рис. 2.4) представляет собой РПУ с направленной поворотной антенной, которая при приеме сигналов ближней или дальней наземной приводной радиостанции (ПРС) автоматически устанавливается в направлении на ПРС. Одновременно происходит вращение стрелки индикатора курса, который отсчитывает курсовой угол радиостанции (  -угол) между продольной осью ВС и направлением на ПРС. При полете на привод
-угол) между продольной осью ВС и направлением на ПРС. При полете на привод  и продольная ось ВС совпадает с направлением на ПРС. Такой режим полета используется для вывода ВС в зону аэродрома или в другую навигационную точку, в которой расположена ПРС. Измерив курсовые углы двух ПРС, положение которых известно, можно восстановить ориентировку − определить место ВС по карте. Для вывода ВС на посадочный курс, совпадающий с направлением оси ВПП, на борту ВС используются два АРК, а на земле две ПРС: дальняя (ДПРС) и ближняя (БПРС), расположенные перед ВПП вдоль ее оси. В результате предпосадочного маневра достигаются нулевые показания индикаторов обоих АРК. В момент пролета ВС над ПРС показание соответствующего индикатора изменяется от 0 до 180°. Телефоны, включенные через СПУ на выход АРК, позволяют прослушать позывные ПРС, а также речевую информацию. Этот канал используется как резервный в случае отказа основного канала связи. Приводная радиостанция и АРК работают в диапазонах гекто- и километровых волн. Для связи используются АМ-радиосигналы.
и продольная ось ВС совпадает с направлением на ПРС. Такой режим полета используется для вывода ВС в зону аэродрома или в другую навигационную точку, в которой расположена ПРС. Измерив курсовые углы двух ПРС, положение которых известно, можно восстановить ориентировку − определить место ВС по карте. Для вывода ВС на посадочный курс, совпадающий с направлением оси ВПП, на борту ВС используются два АРК, а на земле две ПРС: дальняя (ДПРС) и ближняя (БПРС), расположенные перед ВПП вдоль ее оси. В результате предпосадочного маневра достигаются нулевые показания индикаторов обоих АРК. В момент пролета ВС над ПРС показание соответствующего индикатора изменяется от 0 до 180°. Телефоны, включенные через СПУ на выход АРК, позволяют прослушать позывные ПРС, а также речевую информацию. Этот канал используется как резервный в случае отказа основного канала связи. Приводная радиостанция и АРК работают в диапазонах гекто- и километровых волн. Для связи используются АМ-радиосигналы.
Радиомаячная система посадки (СП) (рис. 2.5) обеспечивает снижение ВС на осевую линию ВПП по оптимальной траектории планирования (глиссаде) при отсутствии видимости, а также фиксацию момента пролета над маркерным маяком.
На борту ВС используется аппаратура КУРС-МП, содержащая курсовой (КРП), глиссадный (ГРП) и маркерный (МРП) радиоприемники, а на земле − одноименные маяки КРМ, ГРМ и МРМ.
Антенны РПДУ ГРМ формируют две диаграммы излучения, имеющие в вертикальной плоскости форму пересекающихся лепестков, сигнал ы в которых отличаются звуковой частотой модуляции (  и
и  ). Равносигнальная зона совпадает с глиссадой планирования. При снижении ВС по глиссаде два сигнала на выходе ГРП взаимно компенсируют друг друга и горизонтальная стрелка двухстрелочного посадочного индикатора занимает среднее (нулевое) положение. При отклонении ВС от глиссады вверх или вниз преобладает один из сигналов, что приводит к отклонению стрелки в направлении на глиссаду.
). Равносигнальная зона совпадает с глиссадой планирования. При снижении ВС по глиссаде два сигнала на выходе ГРП взаимно компенсируют друг друга и горизонтальная стрелка двухстрелочного посадочного индикатора занимает среднее (нулевое) положение. При отклонении ВС от глиссады вверх или вниз преобладает один из сигналов, что приводит к отклонению стрелки в направлении на глиссаду.
Антенны РПДУ КРМ формируют диаграмму, подобную РПДУ ГРМ, но в горизонтальной плоскости. Ее равносигнальная зона совпадает с осью ВПП. Индикатором положения ВС является вертикальная стрелка индикатора, отклонение которой соответствует направлению на ось ВПП. При правильном снижении должны поддерживаться нулевые показания обоих индикаторов.
Диаграмма излучения (МРМ) направлена вертикально и имеет конусообразную форму. Маркерные радиомаяки устанавливают в навигационных точках, пролет над которыми должен быть зафиксирован, например в точках расположения ДПРС и БПРС. Момент пролета над МРМ отмечается прослушиванием в телефонах в течение нескольких секунд прерывистого сигнала звуковой частоты, миганием сигнальной лампочки и звонком. Эти сигналы различны для разных МРМ. Маяки работают в диапазоне метровых волн с Помощью АМ-радиосигналов.
Радиотехническая система ближней навигации (РСБН) (рис 2.61 является комплексной радиомаячной системой. Принцип действия РСБН основан на определении места самолета (МС), т. е. положения ВС относительно маяка, в полярной системе координат – азимута  и дальности
и дальности  измеряемых временным методом.
измеряемых временным методом.
Азимут ВС − это угол между северным направлением истинного (или магнитного) меридиана, проходящего через азимутальный радиомаяк (АРМ), и направлением на ВС. Диаграмма излучения АРМ в горизонтальной плоскости представляет сооой узкий луч, вращаемый со строго постоянной угловой скоростью  . В момент, когда луч проходит через северное направление, АРМ излучает всенаправленно но короткий радиоимпульс. Моменту приема этого импульса бортовым РПУ соответствует начало отсчета времени (t = 0). Второй импульс поступает в момент
. В момент, когда луч проходит через северное направление, АРМ излучает всенаправленно но короткий радиоимпульс. Моменту приема этого импульса бортовым РПУ соответствует начало отсчета времени (t = 0). Второй импульс поступает в момент  когда вращающаяся диаграмма изн лучения направлена на ВС. Азимут, пропорциональный измеренному времени
когда вращающаяся диаграмма изн лучения направлена на ВС. Азимут, пропорциональный измеренному времени  отсчитывается стрелочным индикатором.
отсчитывается стрелочным индикатором.
Маяк-ответчик дальности ДРМ, расположенный совместно с АРМ, излучает ответный радиоимпульс в момент приема запросного импульса от бортового РПДУ − запросчика дальности. Бортовой вычислитель измеряет время распространения  , пропорциональное дальности
, пропорциональное дальности  которая отсчитывается цифровым индикатором.
которая отсчитывается цифровым индикатором.
Полет по азимуту на маяк или от него осуществляется, если выдерживается постоянный угол . Полету по круговой орбите соответствует постоянная дальность . Кроме азимутально-дальномерной РСБН содержит курсоглиссадную посадочную систему, подобную рассмотренной выше. В системе используются импульсно-модулированные (ИМ) радиосигналы в дециметровом диапазоне волн. I
Самолетный ответчик системы управления воздушным движением (СО УВД) представляет собой приемопередатчик, работающий в автоматическом режиме и обеспечивающий передачу информации о бортовом номере ВС, остатке топлива, высоте в ответ
на сигналы запроса, поступающие от наземного радиолокатора. Информация передается импульсными сигналами в двоичном коде.
Эта информация в сочетании с радиолокационной о месте самолета и аэродромной обрабатывается ЭВМ, преобразуется в телевизионный сигнал и отображается на экране индикатора диспетчера. Каждое ВС отображено отметкой квадратной формы и отрезком, соответствующим траектории движения ВС за 2 или 4 мин, а также буквенно-цифровой информацией ("формуляром ВС"), полученной от СО УВД и достаточной для управления воздушным движением в приаэродромной зоне. В ответчике используются ИМ-радиосигналы в диапазоне дециметровых волн.
2.4. БОРТОВОЕ РАДИОЛОКАЦИОННОЕ ОБОРУДОВАНИЕ
К радиолокационному оборудованию относятся радиоустройства, в которых использован принцип радиолокации − отражение радиоволн от облучаемых объектов. На самолете РЛО решает навигационные задачи. Существенным преимуществом РЛО является автономность, поскольку радиолокаторы не нуждаются в каких-либо наземных маяках.
Радиолокационный высотомер (РВ) предназначен для измерения истинной высоты самолета. В состав РВ входят РПДУ, РПУ, система обработки информации и индикатор высоты. Принцип работы РВ весьма прост. Антенна передатчика излучает сигнал к земле. После отражения он принимается антенной приемника. Система обработки измеряет время между моментами излучения и приема, пропорциональное высоте.
Индикатор может быть электронно-лучевым для РВ больших высот или стрелочным для посадочных РВ малых высот. Последние используются при выполнении предпосадочного маневра и широко применяются благодаря высокой точности измерения. Показания РВ могут вводиться в систему автоматического управления заходом на посадку.
Радиолокационные высотомеры работают в деци- и сантиметровом диапазонах волн. В РВ больших высот используется импульсная, а в посадочных − частотная модуляция.
Панорамная радиолокационная станция (ПРЛС) применяетеся для получения на экране электронно-лучевого индикатора панорамы радиолокационного изображения местности, над которой пролетает самолет. Эта панорама позволяет экипажу ВС ориентироваться при "слепом" полете. При облучении земной поверхносп радиоволнами энергия отраженных волн зависит от характера этой поверхности (лес, поле, водоем, город и т. д.). Уровень сигнал, отраженного от разных участков земной поверхности и поступающего на вход приемника, колеблется в соответствии с изменением отражающей способности этих участков. Это вызывает изменение яркости свечения соответствующих точек экрана индикатора. В зультате на экране индикатора возникает панорама.
Станция состоит из приемопередатчика, электронно-лучевого индикатора и антенны. Передатчик вырабатывает радиосигнал ввиде коротких импульсов. Антенна излучает энергию в виде луча очень узкого в горизонтальном сечении и широкого (веерообразно) вертикальном. Проекция этого луча на земную поверхность − это радиус окружности, центр которой находится под самолетом. Антенна вращается вокруг вертикальной оси, поэтому облучение поверхности радикально-круговое. Развертка электронного луча индикатора также радиально-круговая.
Чем дальше отклоняется луч от центра экрана, тем более удаленным участкам облучаемой поверхности соответствуют отраженные сигналы, поступающие на вход приемника и вызывающие ту или иную засветку экрана. Вращение развертки проходит одновременно (синхронно) с антенной. Поэтому каждая точка на экране соответствует определенному участку поверхности земли. Расстояние до любого ориентира определяется по масштабным кольцам, а направление на него − курсовой угол  * − с помощью транспортирной шкалы. В случае, показанном на рис. 2.9, на экране засвечен только один ориентир.
* − с помощью транспортирной шкалы. В случае, показанном на рис. 2.9, на экране засвечен только один ориентир.
Наряду с описанным выше режимом "Земля" в ПРЛС используют дополнительные режимы. В режиме "Метео" используется узкая диаграмма направленности, сканирующая (качающаяся) в пределах сектора обзора по курсу ВС. Это позволяет обнаружить препятствия − горные вершины, встречные ВС, облачность. В режиме "Контур" на экране индикатора выделяются области интенсивной грозовой деятельности на фоне облачности, безопасной для полета. В режиме "Снос" можно определить отклонение линии пути от направления продольной оси, вызванное сносом ВС боковым ветром.
Доплеровская радиолокационная станция (ДРЛС) называется также доплеровским измерителем скорости и сноса (ДИСС). Она состоит из приемопередатчика, направленной антенны и двух электронных индикаторов: цифрового − путевой скорости и стрелочного − угла сноса УС.
Принцип измерения истинной путевой скорости основан на эффекте Доплера, который состоит в том, что частота колебаний, поступающих на вход приемника, изменяется, если приемник или передатчик перемещается в направлении распространения волн. Частота колебаний повышается при сближении приемника и передатчика и понижается при их удалении. Этот эффект связан с тем, что скорость взаимного перемещения приемника и передатчика складывается (или вычитается) со скоростью распространения волны, поэтому частота принимаемого сигнала  ,где
,где  и
и  − скорость волны и частота излучаемого сигнала соответственно;
− скорость волны и частота излучаемого сигнала соответственно;  − скорость взаимного перемещения приемника и передатчика вдоль направления распространения волн;
− скорость взаимного перемещения приемника и передатчика вдоль направления распространения волн;  − доплеровский сдвиг частоты − изменение частоты за счет эффекта Доплера. Выделив в приемнике частоту
− доплеровский сдвиг частоты − изменение частоты за счет эффекта Доплера. Выделив в приемнике частоту  и измерив ее, получим результат, пропорциональной скорости .
и измерив ее, получим результат, пропорциональной скорости .
В случае самолетной ДРЛС доплеровский сдвиг возникает за счет перемещения передатчика и приемни
Дата добавления: 2021-04-21; просмотров: 909;
Поиск по сайту
Узнать еще
- F8 Нарушения психологического развития
- F80 Специфические расстройства развития речи
- F81 Специфические расстройства развития школьных навыков
- F82 Специфическое расстройство развития двигательных функций
- F84 Общие расстройства развития
- I этап развития логопедии (античность – 18 век).
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
