АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Адаптивные, или приспосабливающиеся, системы – это системы, которые автоматически приспосабливаются к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров управляющего устройства.
Качество управления численно определяется к р и т е р и е м к а ч е с т в а J,который оценивает заранее выбранный наиболее важный показатель работы САУ. Им может быть какой-либо показатель точности работы системы или качества переходного процесса, производительность, экономичность и т. д. В общем случае критерий качества J представляет собой функционал, зависящий от выходных и входных величин системы. В отдельных случаях J может быть просто функцией.
Примером изменяющихся внешних условий, требующих применения адаптивной САУ, являются нестационарные случайные внешние воздействия на систему, характеристики которых изменяются в широких пределах. В этих условиях точность работы САУ будет изменяться с изменением характеристик внешних воздействий. Для повышения точности системы необходимо изменять настройку корректирующих звеньев по мере изменения характеристик внешних воздействий. Эту перенастройку иногда может выполнять человек. В адаптивных САУ она осуществляется автоматически.
Примером объекта с переменными параметрами, также требующего адаптивного управления, является самолет или ракета. Их динамические характеристики могут изменяться со временем в очень широких пределах вследствие изменения массы из-за уменьшения запаса горючего, изменения формы объекта или аэродинамических сил при изменении высоты и скорости полета. В этих случаях часто невозможно обеспечить автоматическое управление объектом во всех его режимах работы без изменения настройки или схемы управляющего устройства. Для автоматического выполнения этой задачи используются адаптивные САУ.
Помимо объектов с переменными свойствами и внешними условиями, областью применения адаптивных систем являются также объекты с недостаточно известными свойствами или условиями работы. В этом случае процесс адаптации может быть однократным.
На рис. 15.1 показана в общем виде схема адаптивной САУ. Здесь О - объект управления, УУ - управляющее устройство, состоящее из двух частей: УУо и УУа, где УУо - основное управляющее устройство, а УУа - управляющее устройство адаптации.
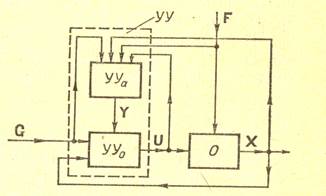
Рис.15.1. Функциональная схема адаптивной САУ.
Контур, образованный УУо и О,является основным контуром системы и представляет собой обычную неадаптивную САУ. Управляющее устройство адаптации УУа управляет основным управляющим устройством УУо, изменяя его оператор, т. е. схему и значения параметров, в соответствии с изменением внешних условий работы и свойств объекта. Для этого УУа измеряет в самом общем случае внешние воздействия G и F и выходную и входную величины объекта Х и U. По этим данным определяется значение критерия качества управления J (Х, U, G,F). В зависимости от алгоритма работы устройство УУа определяет отклонение критерия качества J от заданного или от экстремального его значения и воздействует на УУо так, чтобы ликвидировать это отклонение. Причиной изменения критерия качества J может быть изменение внешних условий работы в виде изменений каких-либо характеристик воздействий G и F или изменение свойств основного контура, т.е. операторов объекта О и основного управляющего устройства УУо.
Таким образом, адаптивная САУ содержит два контура управления - основной контур и второй контур - контур адаптации, создаваемый управляющим устройством адаптации УУа. Для этого второго контура объектом управления является вся основная САУ. Контур адаптации образует второй уровень управления, второй этаж над основной САУ. Возможен и следующий уровень адаптации, когда управляющее устройство адаптации УУа, в свою очередь, подстраивается, изменяется следующим управляющим устройством, которое при изменении внешних условий или свойств первичной адаптивной САУ изменяет алгоритм адаптации, осуществляемой УУа. Аналогично возможны многоступенчатые САУ, содержащие большее число уровней адаптации. У таких САУ каждый последующий уровень управляет предыдущим, расширяя диапазон условий, при которых система будет правильно выполнять свою задачу, или повышая качество ее выполнения в заданном диапазоне.
Как и всякое управление, автоматическая адаптация, выполняемая управляющим устройством УУа, принципиально может быть осуществлена в виде разомкнутой, замкнутой и в самом общем случае комбинированной системы. На рис. 15.1 показан этот последний случай.
При разомкнутой цепи адаптации управляющее устройство УУа не образует замкнутого контура. Как обычно, разомкнутое управление осуществляется здесь либо как программное управление основным управляющим устройством УУо в функции времени, либо как система компенсации, действующая в функции внешних воздействий G или F. Первый вариант адаптации предполагает наличие заданного графика изменения во времени характеристик основной САУ или внешних воздействий.
Адаптация, осуществляемая с помощью замкнутого контура, т. е. с обратной связью, действует в функции выходной величины Х объекта и, возможно, также выходной величины U основного управляющего устройства.
Как и у обычных САУ, основным типом адаптивных САУ является замкнутая система адаптации. Поэтому везде в дальнейшем, под адаптивными САУ имеются в виду именно замкнутые адаптивные САУ. Применение при этом компенсационных сигналов по внешним воздействиям представляет собой вспомогательное средство повышения качества адаптации и упрощения управляющего устройства.
Система адаптации, точнее управляющее устройство УУа, может работать постоянно, периодически (включаясь через определенные интервалы времени) и однократно (путем подключения вручную к САУ для осуществления ее автоматической настройки).
Адаптивные САУ делятся на САУ со стабилизацией и с оптимизацией качества управления. Задачей САУ со стабилизацией качества управления является удержание критерия качества управления J на определенном уровне или в определенном диапазоне. Контур адаптации выполняет здесь задачу стабилизации этого критерия. В САУ с оптимизацией качества управления обеспечивается поиск и поддержание оптимального значения критерия качества.
По характеру изменений в основном управляющем устройстве УУо, производимых управляющим устройством УУа в процессе адаптации, адаптивные системы делятся на самонастраивающиеся и самоорганизующиеся. В самонастраивающихся САУ адаптация осуществляется изменением значений параметров основного управляющего устройства УУо, а в самоорганизующихся САУ изменяется УУо.
Самонастраивающиеся САУ.
Самонастраивающиеся САУ подразделяются на системы со стабилизацией качества управления и с оптимизацией качества управления.
Самонастраивающиеся САУ со стабилизацией качества управления.
В названных системах адаптация заключается в стабилизации заданного значения критерия качества J путем изменения настройки основного управляющего устройства УУо (см. рис. 15.1).
Это осуществляется с помощью настроечных параметров, которые при ручной настройке должны устанавливаться человеком, а в данном случае изменяются автоматически специальным исполнительным устройством, входящим в состав управляющего устройства адаптации УУа.
Основное распространение получили самонастраивающиеся САУ такого типа для стабилизации динамических свойств систем. Критериями качества при этом являются различные косвенные критерии качества переходных процессов (корневые, частотные, интегральные), и непосредственно динамические характеристики объекта, т. е. его частотные и переходные характеристики.
На рис. 15.2, а показана функциональная схема САУ со стабилизацией динамических свойств. Штриховыми линиями обведены основная САУ и управляющее устройство адаптации. Последнее состоит из генератора Гпр. пробных сигналов Gпр, детектора Д этих сигналов на выходе объекта О, вычислительного устройства ВУ и исполнительного устройства ИУ.Цифрами 1 и 2 обозначены контур основной САУ и контур самонастройки.
Пробный сигнал является специально выбранным воздействием на систему, по реакции на которое можно определять текущее значение выбранного критерия качества. Детектор Д служит для выделения из общего выходного сигнала Х, обусловленного всеми внешними воздействиями, приложенными к системе, составляющей Хпр, вызванной именно пробным сигналом Gпр.
Вычислительное устройство ВУ по величине входного пробного воздействия Gпри реакции Хпр системы на него вычисляет величину отклонения ΔJ критерия качества от его заданного значения и подает соответствующий сигнал на исполнительное устройство ИУ.Последнее обычно представляет собой звено интегрирующего типа. Оно изменяет настройку управляющего устройства основного контура в направлении, соответствующем знаку отклонения ΔJ. В качестве настроечных параметров в УУо выбираются такие параметры, изменяя которые, можно в необходимых пределах изменять величину выбранного критерия J. Ими могут быть параметры корректирующих и основных звеньев системы. На рис.15.2, а изображена приведенная одноконтурная схема основной САУ. В действительности она может иметь любую структуру.
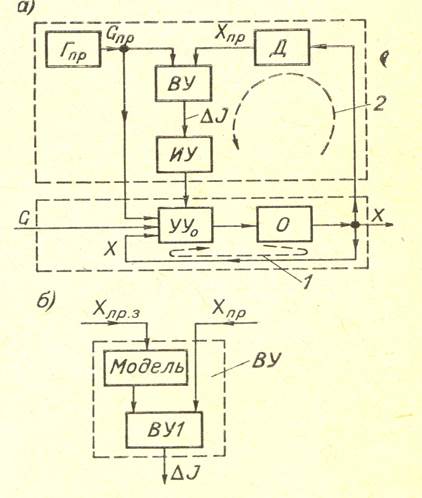
Рис.15.2. Функциональная схема самонастраивающейся САУ со стабилизацией
динамических свойств.
На рис. 15.2,б показан распространенный вариант вычислительного устройства ВУ с эталонной моделью. Модель имеет динамические характеристики, являющиеся эталоном для подстраиваемой под нее основной САУ. Применение модели упрощает вычислительное устройство, так как отклонение критерия качества J от его заданного значения определяется здесь как достаточно простая функция разности сигналов на выходе этой модели и объекта. (Эта операция требует более простого вычислительного устройства, обозначенного на рис. 15.2,б как ВУ1).
В качествe пробного сигнала Хпр. з применяют ступенчатый и импульсный сигналы, гармонический сигнал, случайный сигнал, например белый шум, или, наконец, используют приложенные к системе естественные воздействия. Выбор пробного сигнала определяется видом критерия качества J,т. е. теми динамическими характеристиками системы, которые требуется контролировать.
Например, колебательность системы может быть оценена путем вычисления отношения соседних максимумов или числом колебаний (числом перемен знака) реакции Х на ступенчатое или импульсное пробное воздействие. В этих случаях контур самонастройки работает периодически, для чего генератор пробных сигналов выдает сигналы с определенной частотой следования. В интервале между этими сигналами вычислительное устройство самонастройки определяет величину колебательности, сравнивает ее с заданным значением и формирует стабилизирующий колебательность сигнал подстройки УУо. Колебательность системы может быть определена и с помощью частотных критериев качества, для чего применяются гармонические пробные сигналы.
Самонастраивающиеся САУ с оптимизацией качества управления.
Рассмотрим самонастраивающуюся САУ с оптимизацией статических режимов. Эти системы называются еще системами экстремального регулирования. Они являются простейшими самонастраивающимися САУ с оптимизацией качества управления. В них поддерживается оптимальное значение такого критерия, который характеризует работу объекта в статическом режиме, т. е. обеспечивается работа в точке экстремума соответствующей статической характеристики.
Примером объекта такой системы экстремального регулирования является система автоматической настройки колебательного контура в резонанс (рис. 15.3,а).
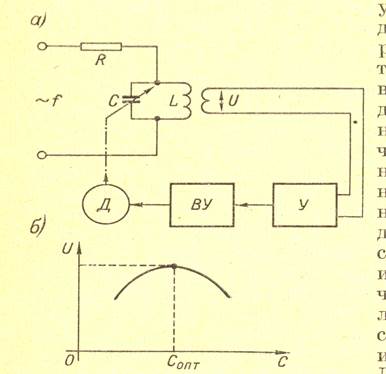
Рис.15.3. Система экстремального регулирования колебательного контура.
Такая задача существует, в частности, в радиоприемных и радиопередающих устройствах. Контур LC настраивается с помощью переменного конденсатора С. Задача настройки - установка такого значения емкости С, при котором резонансная частота контура совпадает с частотой f подаваемого на контур напряжения. Признаком такой настройки является максимум напряжения на резонансном контуре. Таким образом, задача настройки сводится к определению значения С, соответствующего максимуму напряжения на резонансном контуре (рис. 15,3,б).Причиной ухода от резонансной настройки может быть изменение частоты f подаваемого на контур напряжения или изменение параметров контура, например, из-за изменения температуры.
Экстремальный регулятор состоит из усилителя У, усиливающего напряжение U,снимаемое с контура; вычислительного устройства ВУ и исполнительного двигателя Д,поворачивающего ротор конденсатора С.Вычислительное устройство автоматически выполняет ту же логическую задачу, что и оператор при ручной настройке контура. После включения в работу оно определяет направление, в котором надо изменять емкость, чтобы напряжение на контуре возрастало, т. е. определяет направление движения в сторону экстремума. Для этого исполнительный двигатель включается вначале в одном направлении, а затем при необходимости - в другом, и устанавливается искомое направление вращения. Движение в найденном направлении продолжается до тех пор, пока напряжение U не начинает уменьшаться после прохождения максимума. Тогда вычислительное устройство изменяет направление вращения двигателя, чтобы вернуться в точку экстремума. В установившемся режиме исполнительный двигатель периодически реверсируется, создавая небольшие колебания напряжения относительно максимума, с помощью чего все время контролируется местоположение последнего.
Другим примером системы экстремального регулирования является система регулирования скорости двигателя внутреннего сгорания на минимум удельного расхода топлива. Статическая зависимость этого показателя от скорости двигателя имеет минимум, который смещается при изменении нагрузки, качества топлива, давления, температуры и других внешних условий. Система экстремального регулирования обеспечивает поиск и поддержание величины скорости двигателя, соответствующей минимуму расхода топлива. Аналогичная задача минимизации расхода топлива существует при регулировании двигателей самолетов при полете на большие расстояния. Здесь минимум имеется у зависимости расхода топлива на единицу пути от скорости полета, причем положение этого минимума зависит от веса самолета, высоты полета, ветра и др.
Самоорганизующиеся САУ.
Самоорганизующиеся САУ - это адаптивные САУ, в которых адаптация осуществляется путем изменения структурной схемы управляющего устройства УУо основной САУ. Самоорганизующиеся САУ можно представить общей функциональной схемой, изображенной на рис. 15.1. Однако здесь воздействия Y со стороны управляющего устройства адаптации УУа на управляющее устройство УУо основной САУ вызывают изменения не численных значений параметров, а структурной схемы УУо. Поэтому самоорганизующиеся САУ являются системами с переменной структурой. В самоорганизующихся САУ сигнал Y является дискретным сигналом, каждому значению которого соответствует определенный оператор УУо, т. е. определенный алгоритм управления объектом.
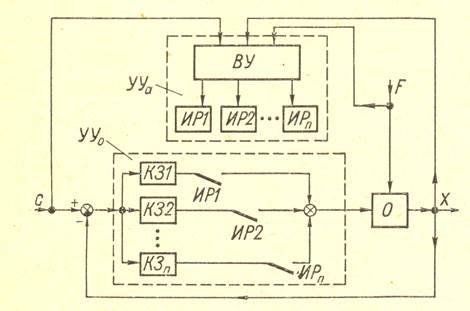
Рис.15.4. Простейшая самоорганизующаяся САУ.
Примером простейшей самоорганизующейся САУ является самоорганизующаяся САУ с адаптивной коррекцией (рис. 15.4). Варьируемая часть УУо основной системы представляет собой набор определенного числа корректирующих звеньев КЗi,которые включаются в контур основной САУ или отключаются от нее исполнительными реле ИРi управляющего устройства адаптации. (На рис. 15.4 условно показано, что все корректирующие звенья являются последовательными корректирующими звеньями.) Задача управляющего устройства адаптации заключается в стабилизации или оптимизации принятого критерия качества управления J путем выбора определенного корректирующего звена или комбинации этих звеньев.
Возможна комбинация описанной самоорганизующейся САУ и системы самонастройки численных значений параметров корректирующих звеньев. В этом случае появляются два этапа (уровня) адаптации: первый этап - выбор структуры, т. е. выбор типа коррекции (выбор определенного корректирующего звена или их комбинации), второй этап - самонастройка параметров выбранной коррекции.
Возможность изменения структуры в ходе адаптации резко расширяет диапазоны изменения свойств объекта и внешних условий, в которых самоорганизующаяся САУ сохраняет работоспособность с выполнением заданных требований к качеству управления, по сравнению с самонастраивающимися САУ. Разумеется, это достигается ценой существенного усложнения контура адаптации.
Примером самоорганизующихся САУ являются системы управления роботами (рис. 15.5). Робот - это машина, предназначенная для выполнения механических действий, подобных выполняемым человеком, занятым физическим трудом.
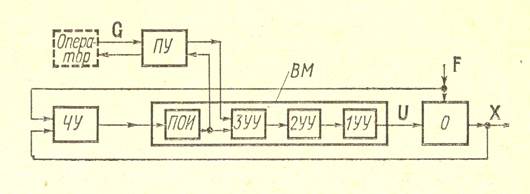
Рис.15.5. Схема управления роботом.
Основная область применения роботов - это автоматизация ручного труда в промышленности, а также выполнение работ в глубинах океана, космосе и других опасных или недоступных для человека областях. Робот состоит из следующих частей: О - рабочих органов - механических рук и органов перемещения, снабженных исполнительными двигателями и являющихся объектом управления; ВУ - управляющей вычислительной машины (компьютера); ЧУ - комплекса чувствительных устройств - органов «чувств» робота, выдающих информацию о внешней среде (F) и о состоянии робота (Х); ПУ - объединенного в пульте управления комплекса средств общения с человеком - оператором, который дает задание (G) роботу и контролирует его действия.
Управление роботом осуществляется следующим образом. Оператор вводит в управляющий компьютер задание G на выполнение определенной работы. Пример простейшего задания - взять предмет в определенном месте и переместить его в другое место, или более сложная задача - осуществить сборку изделия из набора деталей, находящихся в определенном месте. Координаты местонахождения предметов могут задаваться различным образом. В частности, предметы могут быть указаны световым пером непосредственно на экране телевизора, имеющегося на пульте управления, если робот обладает телевизионным зрением. Получив задание, компьютер осуществляет синтез соответствующего алгоритма управления роботом. Это делается путем разложения полученного задания на более простые задания, для которых в памяти компьютера имеются готовые типовые алгоритмы синтеза соответствующего алгоритма управления роботом, приводящего к выполнению этого типового задания. В зависимости от характера типового задания ему может соответствовать алгоритм синтеза оптимальной временной программы разомкнутого управления (например, в случае задачи перемещения в заданную точку или по заданной траектории) или алгоритм синтеза управления замкнутого типа в функции выходных координат Х (например, в случае задачи взятия неориентированного предмета с использованием сигнала обратной связи телевизионного, локационного или тактильного (осязательного) типа). В целом синтезированный алгоритм решения всей поставленной задачи получается комбинированным, включая этапы программного управления и этапы замкнутого или, в свою очередь, комбинированного управления.
После завершения синтеза алгоритма управления и при необходимости его проверки робот осуществляет выполнение задания и по его окончании информирует об этом оператора.
Таким образом, система управления роботом является самоорганизующейся САУ с изменяющимся в соответствии с заданиями алгоритмом работы. Она имеет иерархическую структуру, в которой различаются три уровня иерархии управления, алгоритмически реализуемые в компьютере (см. рис. 15.5). На первом (нижнем) уровне 1УУ синтезируются оптимальные траектории движения Ui(t)по каждой степени подвижности робота, которые позиционно отрабатываются соответствующими исполнительными двигателями. На втором уровне 2УУ синтезируются элементарные рабочие операции, выполняемые захватом или другим рабочим инструментом механических рук робота. Примеры таких элементарных рабочих операций - найти предмет, взять его, переместить его в определенное место, навинтить гайку, просверлить и т. п. На третьем (верхнем) уровне 3УУ определяются последовательность и набор элементарных операций второго уровня, приводящих к выполнению всего задания, выданного оператором.
Таким образом, на каждом уровне управления происходит разбиение задания, полученного с предыдущего уровня, на более простые задания. Соответственно на каждом уровне используется своя символика, свой алгоритмический язык.
Помимо задачи управления, алгоритмически реализуемой в виде перечисленных трех уровней управления, компьютер выполняет еще отдельную задачу первичной обработки информации (ПОИ на рис. 15.5), поступающей от чувствительных устройств. Эта задача представляет большую сложность.
Алгоритмы ее решения включают в себя алгоритмы распознавания образов и часто реализуются в виде самостоятельных самоорганизующихся систем (например, при обработке телевизионной зрительной информации).
Сложность заданий, которые могут быть выполнены третьим уровнем иерархии управления роботом, что в значительной степени зависит, в свою очередь, от качества первичной обработки информации, поступающей от чувствительных устройств, определяет «интеллектуальный» уровень робота в целом. Алгоритмы третьего уровня - это алгоритмы принятия решений, при синтезе которых используются методы автоматического доказательства теорем, методы эвристического программирования.
Все, что выходит за рамки возможностей этого уровня (вместе с ПОИ), есть область интеллекта человека - оператора, который образует как бы четвертый уровень иерархии управления роботом, обслуживая его своим интеллектом при формулировании задания и контролируя ход выполнения последнего.
Высшим типом САУ являются самообучающиеся системы.
| <== предыдущая лекция | | | следующая лекция ==> |
| Канал связи по линии электропередачи. | | | промышленных приборов и средств автоматизации (ГСП). |
Дата добавления: 2016-12-09; просмотров: 15915;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
