промышленных приборов и средств автоматизации (ГСП).
ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
Основные сведения о технических средствах Государственной системы
промышленных приборов и средств автоматизации (ГСП).
Основные понятия ГСП.
Рассмотрим основные понятия Государственной системы промышленных приборов и средств автоматизации (ГСП), созданной в нашей стране в целях экономически и технически рационального решения проблемы обеспечения техническими средствами систем контроля, регулирования и управления технологическими процессами различных отраслей народного хозяйства.
По функциональному признаку все изделия ГСП разделены на следующие группы:
- получения информации о состоянии объекта управления;
- приема, преобразования и передачи информации по каналам связи;
- преобразования, хранения и обработки информации, формирования команд управления, связи с оперативным персоналом;
- использования командной информации для воздействия на управляемый объект.
В первую группу устройств входят измерительные и нормирующие преобразователи, другие устройства, используемые для контроля состояния объекта или его управляемых переменных.
Ко второй группе относят устройства для передачи информации на расстояние (например, устройства телемеханики).
Третья группа представляет собой устройства, предназначенные для формирования управляющих сигналов (т. е. командной информации): функциональные преобразователи, логические устройства, реле, программные устройства, регулирующие приборы, вычислительные устройства и комплексы, задающие элементы и др.
В четвертую группу входят исполнительные элементы и их компоненты: электрические, пневматические и гидравлические исполнительные механизмы, усилители мощности к ним, а также устройства представления информации.
В сельскохозяйственном производстве используют как средства автоматизации общепромышленного назначения, входящие в ГСП, так и технические средства, применяемые в основном в сельском хозяйстве.
Измерительные преобразователи.
Кратко рассмотрим измерительные преобразователи (в последующих подразделах будут рассмотрены и другие элементы систем автоматики).
Необходимую для управления информацию о состоянии объекта и внешних воздействиях получают в виде значений отдельных физических величин с помощью соответствующих технических устройств, которые в автоматике называют измерительными преобразователями (ИП).
В отличие от измерительных приборов, где такая информация дана в виде, удобном для непосредственного восприятия оператором - человеком, информация в ИПпредставляется в виде определенной физической величины, удобной для передачи и дальнейшего преобразования в системе автоматики. Эту величину называют сигналом, и она однозначно связана с контролируемой физической величиной или параметром того или иного технологического процесса.
ГСП охватывает лишь часть контролируемых величин, которые наиболее часто используют в практике автоматизации. В ГСП все контролируемые величины разбиты на пять групп: теплоэнергетические, механические, электроэнергетические величины, химический состав и физические свойства.
Теплоэнергетические величины: температура, давление, перепад давлений, уровень и расход.
Электроэнергетические величины: постоянные и переменные ток и напряжение, мощность (активная и реактивная), коэффициент мощности, частота и сопротивление изоляции.
Механические величины: линейные и угловые перемещения, угловая скорость, деформация усилия, вращающие моменты, количecтвo изделий, твердость материалов, вибрация, шум и масса.
Химический состав: концентрация, состав, химические свойства.
Величины, характеризующие физические свойства: влажность, электропроводность, плотность, вязкость, освещенность и др.
Устройства, в которых однократно (первично) преобразуется измеряемая физическая величина, принято называть первичными ИП.
ИП могут соединяться, образуя следующие структурные схемы:
- однократного прямого преобразования;
- последовательного прямого преобразования;
- дифференциальную;
- с обратной связью (компенсационную).
Простейшие ИПсостоят из одного преобразователя. В случае последовательного соединения нескольких первичных преобразователей выходная величина предыдущего преобразователя является входной величиной последующего. Последовательное соединение ИПприменяют в том случае, когда однократное преобразование не дает удобного для использования выходного сигнала. При дифференциальной схеме устраняется влияние на результат преобразования искажающих внешних факторов благодаря сопоставлению (сравнению) преобразованной и некоторой эталонной величин, одинаково подверженных действию этих факторов. Схема ИПс обратной связью характеризуется высокой точностью, универсальностью и малой зависимостью коэффициента преобразования от внешних возмущений.
ИП бывают с выходными естественным и унифицированным сигналами.
Естественный выходной сигнал формируется первичными ИПестественным путем и представляет собой угол поворота, перемещение, усилие, напряжение (постоянное и переменное), сопротивление (активное и комплексное), электрическую емкость, частоту и др. ИПс естественным выходным сигналом (термопары, терморезисторы, тензодатчики и др.) широко применяют при автоматизации простых объектов.
Унифицированный сигнал - это сигнал определенной физической природы, изменяющийся в определенных фиксированных пределах независимо от вида измеряемой величины, метода и диапазона ее измерения. Среди унифицированных сигналов наибольшее распространение получили электрические сигналы постоянного и переменного тока, напряжения и частоты, а также пневматические сигналы.
К основным видам аналоговых унифицированных сигналов относят:
- электрические постоянного тока, мА: 0 ... 5; 0 … 20; -5 … 0 ... 5;
- электрические постоянного напряжения: 0 …10 мВ; 0 … 20 мВ; - 10 ... 0 ... 10 мВ; 0 .. .1 В; -1 ... 0 ... 1 В;
- электрические переменного напряжения, В: 0 ... 2, -1 ... 0 ... 1;
- электрические переменного тока на частоте, кГц: 4 ... 8; 2 .. .4;
- пневматические 20 ... 100 кПа.
Преобразователи, служащие для изменения масштаба сигнала, называют масштабными ИП.
Для получения унифицированных аналоговых сигналов применяют ИП, называемые нормирующими.
Специфика контролируемой величины существенно влияет на метод преобразования, используемый в первичном ИП.
Типы преобразователей, применяемых в ГСП, подразделяют на шесть групп: механические, электромеханические, тепловые, электрохимические, оптические и электронно-ионизационные.
Преобразователи, предназначенные для передачи сигнала измерительной информации на расстояние, называют передающими. Их используют в системах телемеханики.
Исполнительные механизмы и регулирующие органы.
Для управления объектами в соответствующих системах автоматики предусматривают исполнительные элементы (ИЭ), в состав которых входят исполнительные механизмы (ИМ) и регулирующие органы.
По виду потребляемой энергии ИМ подразделяют на электрические, гидравлические и пневматические.
Электрические исполнительные механизмы (ЭИМ) получили наиболее широкое распространение. Их выпускают постоянной и переменной скорости.
В системах управления технологическими процессами чаще всего применяют ЭИМ постоянной скорости. В результате повторно-кратковременного включения асинхронного электродвигателя ЭИМ реализует закон перемещения регулирующего органа (РО), формируемый управляющим элементом системы.
ЭИМ подразделяют также по характеру перемещения РО на
следующие виды:
- механизмы электрические однооборотные (МЭО);
- механизмы электрические многооборотные (МЭМ);
механизмы электрические прямоходные (МЭП) с поступательным движением РО.
Обычно ЭИМ состоит из электродвигателя, редуктора, аппаратуры контроля и управления, а также приставки, формирующей перемещение выходного вала.
Для улучшения динамических характеристик и фиксации выходного вала ЭИМ применяют тормоз.
Для обратной связи и контроля положения выходного вала служит датчик положения.
При управлении ЭИМ используют контактные и бесконтактные системы. В первом случае трехфазным асинхронным электродвигателем управляют посредством релейно-контактной аппаратуры, а во втором - применяют тиристорное управление специальными двухфазными конденсаторными электродвигателями.
В сельскохозяйственной автоматике распространены электромагнитные клапаны, в которых в качестве привода используют электромагниты (соленоиды). Они отличаются простотой конструкции, высокой надежностью, небольшими размерами и массой. Электромагнитные клапаны - МЭП систем двухпозиционного управления, конструктивно выполненные совместно с регулирующими органами. РО занимает два устойчивых положения - «Открыто» и «Закрыто». Катушки соленоида питаются от источников постоянного тока.
Другим примером конструктивного выполнения ЭИМ совместно с РО является фрикционная муфта с электромагнитным управлением (рис. 16.1).
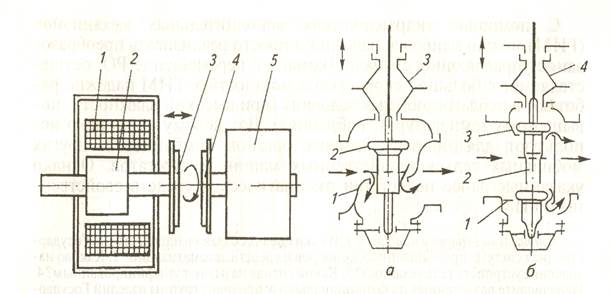
Рис. 16.1. Схема фрикционной муфты с Рис. 16.2. Схемы регулирующих органов: а – од-
электромагнитным управлением. нодроссельного РО; б – двухдроссель-
ного РО.
Она состоит из электромагнита 1, якоря 2 и фрикционного кольца 3. При подаче сигнала управления электромагнит 1 перемещает якорь 2, который находится на одном валу с фрикционным кольцом 3 муфты. Это кольцо прижимается к вращающемуся кольцу 4 двигателя 5. Ввиду трения между кольцами 3 и 4 вращение передается на отборное устройство.
Для управления механическими потоками применяют также муфты скольжения, сухого и вязкого трения.
Схемы РО расхода жидкости показаны на рисунке 16.2. В односедельном РО (рис. 16.2,а)изменение пропускной способности достигается поступательным перемещением затвора 2 вдоль оси седла 1корпуса 3. В двухседельном РО (рис. 16.2, б) изменение пропускной способности достигается перемещением затвора 2 вдоль оси проходов двух седел 1и 3 корпуса 4. Преимущество двухседельных РО - наличие разгруженного затвора.
Существуют и другие типы РО. Например, для изменения расхода сыпучих материалов применяют ленточные, шнековые, дисковые и скребковые дозаторы.
Исполнительные элементы систем в пожаро- и взрывоопасных цехах выполняют на базе пневматических исполнительных механизмов (ПИМ). В сельскохозяйственной автоматике чаще других применяют мембранные ПИМ. В них энергию сжатого воздуха воспринимает мембрана. Она преобразует ее в усилие, преодолевающее сопротивление пружины для перемещения, например, затвора РО (см. рис. 16.2). Затем усилие пружины используется для перемещения золотника в обратном направлении, что достигается снижением давления воздуха.
К числу недостатков пневматических средств управления относят следующие: неудобство в наладке, связанное со сложностью оперативных изменений давления воздуха при проверке работоспособности; необходимость применения специальных компрессорных установок питания.
С помощью гидравлических исполнительных механизмов (ГИМ) можно наиболее надежно и просто реализовать преобразование управляющих сигналов-команд в перемещение РО, осуществляемое с большой скоростью и мощностью. ГИМ надежно работают в неблагоприятных условиях (при высокой влажности, повышенных температурах, вибрациях). Вот почему их широко используют для привода рабочих органов комбайнов и других мобильных сельскохозяйственных машин и агрегатов. Однако указанные ранее недостатки пневматических средств свойственны и ГИМ.
| <== предыдущая лекция | | | следующая лекция ==> |
| АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. | | | Физическая реализация звена. |
Дата добавления: 2016-12-09; просмотров: 2234;
Поиск по сайту
Узнать еще
- B. Медленно действующие противоревматоидные средства
- I. Решение логических задач средствами алгебры логики
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- II. РАСПРЕДЕЛЕНИЕ ЛЕКАРСТВЕННЫХ СРЕДСТВ В ОРГАНИЗМЕ. БИОЛОГИЧЕСКИЕ БАРЬЕРЫ. ДЕПОНИРОВАНИЕ
- III. Формирование личности посредством профориентации и организации досуговой деятельности.
- IV. ФЕХТОВАНИЕ — СРЕДСТВО ПСИХИЧЕСКОЙ ПОДГОТОВКИ БОЙЦА
- R-Keeper v 6 - система автоматизации ресторанов
- А) Антихолинэстеразные средства обратимого действия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
