Плавучие средства навигационного оборудования.
К плавучим средствам навигационного оборудования относятся плавучие маяки, буи, бакены и вехи. Плавучие средства навигационного оборудования ограждают участок водной поверхности, который представляет опасность для плавания судов, или указывают направление фарватера в районах, где можно плавать лишь по определенным путям.
Плавучий маяк —судно, оборудованное маячной аппаратурой и установленное на якорях в точно обозначенном на карте месте. Плавучий маяк служит подходным ориентиром к порту, заливу, бухте и т. д. и на нем часто размещается лоцманская вахта. Судно имеет отличительную окраску, а на его бортах наносится название маяка.
| 
|
| Рис. 35. Буй освещаемый | Рис. 36 Веха: 1 — деревянный шест; 2 — буек; 3 — топовая фигура; 4 — якорь |
На морских навигационных картах плавучий маяк обозначается знаком, похожим на кораблик с мачтой посередине. Рядом с его обозначением и названием на карте дается полная характеристика огня. Из плавучих средств навигационного оборудования он является наиболее надежным. Если плавучий маяк по каким-либо причинам не находится на своем штатном месте, то на нем поднимают установленные сигналы: днем два черных шара, один в носовой, другой в кормовой части судна, ночью — два красных огня, расположенных по одному в носовой и кормовой частях судна. Днем вместо черных шаров могут быть подняты два красных флага.
Буй (рис. 35) — полый металлический корпус шарообразной, конусообразной или цилиндрической формы с укрепленной на нем ажурной надстройкой, в которой находится световая аппаратура. К нижней части металлического корпуса прикреплено якорное устройство. Характер и цвет огней устанавливается в зависимости от назначения буя. Для предупреждения судоводителя во время плохой видимости о близкой навигационной опасности буи снабжаются средствами туманной сигнализации — колоколами, свистками или гудками. На боковых сторонах буя отличительной краской наносится его порядковый номер.
Бакен — плавучий предостерегательный знак цилиндрической, конической или другой формы, устанавливаемый на якоре для ограждения опасностей или фарватеров. Для того чтобы отличить один бакен от другого, они окрашиваются в различные цвета.
Веха (рис. 36) — вертикально стоящий на якоре деревянный шест с топовой фигурой. Веха поддерживается на плаву специальным закрепленным на ней буйком. Вехи имеют различную окраску и форму фигур, что позволяет мореплавателю определить безопасную сторону прохода судна.
Дальностью видимости называется наибольшее расстояние, с которого глазу наблюдателя становится видимым наблюдаемый объект.
Различают географическую и оптическую дальности видимости.
Географическая дальность видимости — дальность открытия ночью маячного огня, днем башни маяка или знака — зависит от кривизны земли, рефракции атмосферы и высоты огня, башни или знака над уровнем моря (рис. 21). Дальность открытия при высоте глаза наблюдателя, равной 5 м определяется по формуле

где L — дальность открытия в морских милях; Н — высота маяка или знака в метрах над уровнем моря; 2,08 и 4,65 — постоянные коэффициенты.
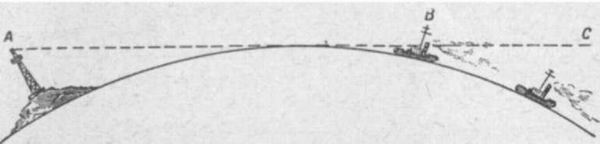
Рис. 21. Схема дальности видимости: АВ — географическая дальность видимости; АС— оптическая дальность видимости
За счет рефракции дальность открытия увеличивается в среднем на 8%.
Оптическая дальность видимости зависит от световых данных маяка, прозрачности атмосферы и условий наблюдения (от кривизны земли не зависит).
Определение места судна по визуальным пеленгам береговых ориентиров и средств навигации, включая маяки, бакены, буи и топографические знаки в дневное и ночное время суток. СКП определения места судна.
Определение места по двум пеленгам:
Способ определения места судна по двум пеленгам один из наиболее распространённых при плавании в узкостях или вдоль берега, вблизи навигационных опасностей.
Это объясняется ещё и тем, что часто в видимости судна не бывает одновременно большого количества ориентиров. Сущность способа состоит в следующем. В быстрой последовательности берут пеленги двух объектов (маяков, знаков, мысов и т. д.) Рассчитывают истинные пеленги, если имеется поправка компаса, и прокладывают их на карте.
В точке пересечения пеленгов будет обсервованное место судна F.

 A Δ B Δ
A Δ B Δ

Θ

F
Этот способ имеет ряд преимуществ (простота и быстрота определения), но и ряд недостатков, главным из которых является полное отсутствие контроля при единичном определении.
Пеленгованию, как и любому измерению, сопутствуют случайные ошибки, к которым можно отнести ошибки из-за неточности наведения, колебаний в момент качки, отсутствие стабилизации в вертикальной плоскости и др. Это приводит к тому, что любому измеренному пеленгу соответствует ошибка  , град. Если такую ошибку подставить в формулу для оценки точности обсервованного места, то получим формулу для средней квадратической погрешности обсервации по двум пеленгам:
, град. Если такую ошибку подставить в формулу для оценки точности обсервованного места, то получим формулу для средней квадратической погрешности обсервации по двум пеленгам:
 .
.
Формула показывает, что при малых и близких к 180о углах Q ошибки увеличиваются. Следовательно, место будет получаться точнее при  . Точность определения зависит также от расстояния до ориентиров.
. Точность определения зависит также от расстояния до ориентиров.
При определении места судна по двум пеленгам ошибка в принятой поправке компаса может быть значительно более случайных ошибок.
Для определения правильного значения поправки компаса по пеленгам двух предметов достаточно найти величину её ошибки, а затем алгебраически вычесть эту ошибку из принятого значения поправки компаса:  , где DК – поправка компаса, DКпр – принятое значение поправки компаса, eк – ошибка принятого значения с её знаком.
, где DК – поправка компаса, DКпр – принятое значение поправки компаса, eк – ошибка принятого значения с её знаком.
Определение места по трём пеленгам.
При определении места по трём пеленгам в быстрой последовательности берут пеленга трёх предметов A, B, C. Переводят их в истинные и прокладывают на карте. Если бы наблюдения не содержали ошибок и пеленги были взяты одновременно, то все три пеленга пересеклись бы в одной точке F, представляющей собой место судна.
Однако из-за неизбежного действия ряда факторов пеленги обычно не пересекаются в одной точке, а образуют так называемый треугольник погрешности. Его появление может быть вызвано различными видами ошибок:
· Промахами при снятии счёта и при исправлении компасных пеленгов;
· Ошибки в опознавании ориентиров;
· Ошибки в принятой поправке компаса;
· Случайные ошибки пеленгования в прокладке.
Чтобы избежать графических ошибок при построении, можно рассчитать параллельное смещение каждой линии положения при изменении поправки на 3…5о и построить новый треугольник погрешности, перенеся все линии положения в сторону увеличения или уменьшения. Для рассчёта смещения необходимо снять с карты расстояния до каждого из трёх предметов. Тогда:
 ,
,  ,
,  .
.
Влияние ошибки, вызванной неодновременным взятием пеленгов, можно исключить несколькими способами. Один из них – правильный выбор очерёдности взятия пеленгов. Первым можно пеленговать объекты, расположенные ближе к диаметральной плоскости судна. Пеленги этих ориентиров изменяются медленнее. Если берутся пеленги огней маяков, то наблюдение надо так организовывать, чтобы не пришлось долго ждать проблеска огня, если он пеленгуется не первым. При скорости до 15 уз, когда прокладка ведётся на путевых картах, этого достаточно для исключения ошибки от неодновременного пеленгования. При больших скоростях или при ведении прокладки на крупномасштабных картах или планах для уточнения следует привести пеленга к среднему моменту. Для этого берут пять пеленгов в следующем порядке, пеленгуют ориентиры A, B и C, а затем ещё повторно пеленги В и А в обратном порядке. Считая, что пеленги изменяются линейно, рассчитывают среднее значение пеленгов объектов А и В.
 ,
,  .
.
Определение места судна по пеленгу и расстоянию.
Этот способ наиболее часто употребляется при использовании радиолокатора. Обычно пеленг и расстояние измеряют до одного ориентира, однако бывает целесообразнее измерить пеленг на светящийся маяк по компасу, а расстояние измерить до берега. В первом случае угол пересечения линий положения будет равен 90о, а во втором – разности пеленгов, снятых с карты.
Чтобы уменьшить ошибки неодновременности наблюдений, вначале измеряются расстояния, а затем берётся пеленг при положении предмета ближе к траверзу и в обратной последовательности – при острых углах. Обсервованное место получается на линии ИП на расстоянии от предмета, равном Д.
При измерении пеленга и расстояния до одного ориентира средняя квадратическая погрешность места судна равна (угол )
При измерении пеленга и расстояния до разных объектов требуется знать угол пересечения, тогда:
Оценка точности места судна производится с помощью эллиптической и круговой (радиальной) погрешностей.
Эллиптическая погрешность- это эллипс соответствующих размеров и ориентировки с центром в месте судна, в пределах которого с заданной вероятностью находится истинное место судна.
Средний квадратический эллипс погрешностей – это эллипс с полуосями a и b, равными средней квадратической погрешности каждой линии положения, в этом случае вероятность нахождения судна в нем равна 0,393.
Предельный эллипс погрешностей – эллипс, в пределах которого судно находится с вероятностью равной или более 0,95, при этом полуоси эллипса равны 2,5 средней квадратической погрешности каждой линии положения.
Средний квадратический эллипс погрешностей строится следующим образом: от полученного места судна производится параллельное смещение с линий положения в одну и другую сторону на величину  и
и  , как показано на рис. В образовавшийся параллелограмм вписывается эллипс.
, как показано на рис. В образовавшийся параллелограмм вписывается эллипс.
Радиальная (круговая) погрешность места – круг с центром в полученном месте судна с радиусом R, равным  , где a и b – полуоси эллипса погрешностей.
, где a и b – полуоси эллипса погрешностей.
СКП (средняя квадратическая погрешность) места судна, это радиальная погрешность с радиусом, полученным по полуосям среднего квадратического эллипса.
Веоятность нахождения судна в таком круге в зависимости от сжатия эллипса равна от 0,63 до 0,68.
Для получения 95% вероятности нахождения судна в круге необходимо радиус R средней квадратической погрешности умножить на 2, и таким радиусом построить круг.
Для предотвращения навигационных аварий, связанных с посадкой на мель, наряду с другими мероприятиями предпринимались попытки нормировать требования к точности и частоте обсервации в зависимости от условий плавания. Неоднократное обсуждение этих вопросов в комитете по безопасности мореплавания Международной морской организации (ИМО) привело к созданию стандарта точности судовождения, принятому в 1983 г. на 13-й Ассамблее ИМО в резолюции А.529.
Дата добавления: 2021-03-18; просмотров: 590;
Поиск по сайту
Узнать еще
- III. Механизмы, средства и методы психологического воздействия.
- VIII РАСПОЛОЖЕНИЕ ОБОРУДОВАНИЯ.
- А) Технические средства обучения
- Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK
- Автоматические средства обнаружения и тушения пожара
- Адренергические средства
- Адсорбирующие средства
- Алгоритмы диагноза и средства диагноза

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
