Фундаментальные принципы управления
В основе построения системы автоматического управления лежат некоторые общие фундаментальные принципы управления, определяющие, каким образом осуществляется увязка алгоритмов функционирования и управления с фактическим функционированием или причинами, вызывающими отклонение функционирования от заданного. В настоящее время в технике известны и используют три фундаментальных принципа: разомкнутого управления, компенсации и обратной связи.
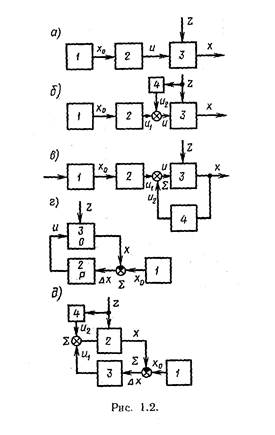
Принцип разомкнутого управления. Сущность принципа состоит в том, что алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируется другими факторами — возмущениями или выходными координатами процесса. Общая функциональная схема системы показана на рис. 1.2, а. Задание  алгоритма функционирования может вырабатываться как специальным техническим устройством — задатчиком программы 1, так и выполняться заранее при проектировании системы и затем непосредственно использоваться при конструировании управляющего устройства 2. В последнем случае блок 1 на схеме будет отсутствовать. В обоих случаях схема имеет вид разомкнутой цепочки, в которой основное воздействие передается от входного элемента к выходному элементу 3, как показано стрелками. Это и дало основание названию принципа. Близость х к x0 в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
алгоритма функционирования может вырабатываться как специальным техническим устройством — задатчиком программы 1, так и выполняться заранее при проектировании системы и затем непосредственно использоваться при конструировании управляющего устройства 2. В последнем случае блок 1 на схеме будет отсутствовать. В обоих случаях схема имеет вид разомкнутой цепочки, в которой основное воздействие передается от входного элемента к выходному элементу 3, как показано стрелками. Это и дало основание названию принципа. Близость х к x0 в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
 Несмотря на очевидные недостатки, этот принцип используют очень широко. Элементы, представляемые разомкнутой цепью, входят в состав любой системы, поэтому принцип представляется настолько простым, что его не всегда выделяют, как один из фундаментальных принципов.
Несмотря на очевидные недостатки, этот принцип используют очень широко. Элементы, представляемые разомкнутой цепью, входят в состав любой системы, поэтому принцип представляется настолько простым, что его не всегда выделяют, как один из фундаментальных принципов.
Принцип компенсации (управление по возмущению). Если возмущающие воздействия настолько велики, что разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования, то для повышения точности иногда возможно, измерив возмущения, ввести по результатам измерения коррективы в алгоритм управления, которые компенсировали бы вызываемые возмущениями отклонения алгоритма функционирования.
Так как отклонение регулируемой величины зависит не только от управляющего u, но и от возмущающего z воздействия,  , то в принципе можно подобрать управление
, то в принципе можно подобрать управление  таким образом, чтобы в установившемся режиме отклонение отсутствовало
таким образом, чтобы в установившемся режиме отклонение отсутствовало  . Так, в простейшем линейном случае, если характеристика объекта в статике
. Так, в простейшем линейном случае, если характеристика объекта в статике  , то, выбирая
, то, выбирая  , получим
, получим  .
.
Следует подчеркнуть, что компенсация достигается только по измеряемым возмущениям.
Принцип обратной связи. Регулирование по отклонению. Систему можно построить и так, чтобы точность выполнения алгоритма функционирования обеспечивалась и без измерения возмущений. На рис. 1.2,6 показана схема, в которой коррективы в алгоритм управления вносятся по фактическому значению координат в системе. Для этой цели в конструкцию системы вводят дополнительную связь 4, в которую могут входить элементы для измерения и для выработки корректирующих воздействий на управляющее устройство. Схема имеет вид замкнутой цепи, что дало основание назвать осуществляемый в ней принцип принципом управления по замкнутому контуру. Так как направление передачи воздействий в дополнительной связи обратно направлению передачи основного воздействия на объект, введенную дополнительную цепь называют цепью обратной связи.
Схема, изображенная на рис. 1.2, в, представляет собой наиболее общий вид замкнутых систем. По такой схеме строят, например, многие преобразовательные и счетно-решающие элементы. В управлении же наиболее широко распространен частный вид замкнутых систем, в которых коррекцию алгоритма управления осуществляют не непосредственно по значениям координат x, а по их отклонениям от значений, определяемым алгоритмом функционирования x0, т.е.  . Схема, реализующая эту разновидность управления с обратной связью, показана на рис. 1.2, г, в которой: элемент 1, задающий алгоритм функционирования, и элемент сравнения — сумматор S , осуществляющий вычитание х из x0, т.е. вырабатывающий величину D х, называемую отклонением или ошибкой управления. Часто оказывается целесообразно вырабатывать управляющее воздействие в функции не только D х, но также его производных и интегралов по времени
. Схема, реализующая эту разновидность управления с обратной связью, показана на рис. 1.2, г, в которой: элемент 1, задающий алгоритм функционирования, и элемент сравнения — сумматор S , осуществляющий вычитание х из x0, т.е. вырабатывающий величину D х, называемую отклонением или ошибкой управления. Часто оказывается целесообразно вырабатывать управляющее воздействие в функции не только D х, но также его производных и интегралов по времени
| (1.3) |
Функция f должна быть неубывающей функцией D х и одного с ней знака.
Управление в функции отклонения при упомянутых требованиях к функции f называют регулированием. Управляющее устройство в этом случае называют автоматическим регулятором. Объект О и регулятор Р образуют замкнутую систему, называемую системой автоматического регулирования (CAP).
Регулятор, вырабатывающий управляющее воздействие u в соответствии с алгоритмом управления (1.3), образует по отношению к выходу объекта отрицательную обратную связь, поскольку знак D х, как следует из (1.3), обратный знаку x. Обратную связь, образуемую регулятором, называют главной обратной связью. Кроме нее, внутри регулятора могут быть и другие местные обратные связи.
Дата добавления: 2016-11-29; просмотров: 4419;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Общие методические принципы в канистерапии
- VI. Биоэнергетические принципы аналитической терапии
- Автоматизации и управления
- Автоматизация как направление дальнейшего совершенствования управления силами и средствами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
