Пространственная (третичная) обработка информации.
Третичная (мультирадарная) обработка – это процесс обработки сигналов или объединения первичной РЛИ по пространству с целью улучшения характеристик радиолокационного наблюдения.
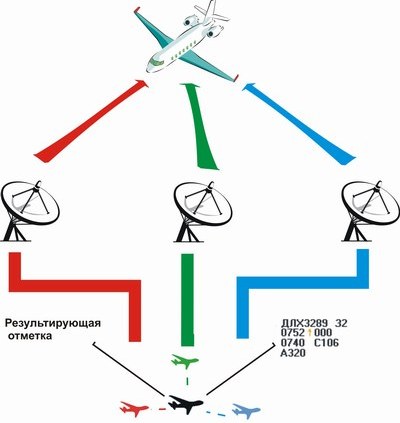
Если сигналы или первичную РЛИ, полученные в отдельных пунктах наблюдения, передать и сосредоточить в некотором центре обработки, то это позволит использовать дополнительную энергетику, корреляционные связи и пространственное подобие первичной РЛИ об одной цели от разных источников.
Энергетика принятого сигнала, которую можно использовать, пропорциональна суммарному раскрыву разреженной антенны.
Корреляционные связи принятых в разных точках пространства сигналов определяются расстоянием между этими точками и интервалом пространственной корреляции рассеянного или излученного целью сигнала. Последний определяется длиной волны l, раскрывом антенны излучающей системы Lа и расстоянием от цели до зоны анализа Rц:  . Если расстояние между пунктами приема Dl меньше интервала пространственной корреляции сигнала dl, то принятые в этих пунктах приема сигналы являются коррелированными и их коэффициент корреляции можно считать равным
. Если расстояние между пунктами приема Dl меньше интервала пространственной корреляции сигнала dl, то принятые в этих пунктах приема сигналы являются коррелированными и их коэффициент корреляции можно считать равным
 . (10.15)
. (10.15)
В противном случае сигналы некоррелированы.
Пространственное подобие первичной РЛИ об одной цели от разных источников, обусловленное фактическим наличием цели в определенной точке пространства, может быть использовано для отождествления РЛИ.
Техническим средством третичной обработки является многопозиционная радиолокационная система (МП РЛС), которая включает несколько разнесенных в пространстве приемных, передающих или приемопередающих позиций и в которой производится совместная обработка сигналов, поступающих от этих позиций. Центр совместной обработки соединяется линиями связи со всеми позициями.
Можно назвать три способа пространственного объединения сигналов и первичной РЛИ:
· пространственно-когерентное объединение сигналов с привязкой позиций по времени, частоте и фазе принятых колебаний;
· частичное (неполное) пространственно-когерентное объединение сигналов с привязкой позиций по времени и частоте;
· пространственно-некогерентное объединение сигналов и первичной РЛИ с привязкой позиций только по времени.
В пространственно-когерентных МП РЛС взаимные фазовые сдвиги сигналов в трактах разнесенных позиций и линиях связи известны и сохраняются практически неизменными на интервале времени, намного превышающем время наблюдения сигнала. В таких РЛС необходима взаимная привязка не только по времени и частоте, но и по начальным фазам колебаний. Это можно обеспечить с помощью опорного сигнала, позволяющего измерять фазовые сдвиги и осуществлять коррекцию или учет при обработке.
В пространственно-когерентных МП РЛС с частичной пространственной когерентностью, которая сохраняется на интервале времени порядка времени наблюдения, информация о начальных фазах сигналов не используется. Привязка позиций осуществляется только по времени и частоте.
В пространственно-некогерентных МП РЛС фазовая информация полностью исключается в результате детектирования сигналов до их объединения. Объединение сигналов может осуществляться на следующих уровнях:
· объединение видеосигналов после детектирования в каждой позиции;
· объединение обнаруженных отметок и единичных замеров; при этом вся первичная обработка проводится на каждой позиции, а на совместную обработку поступает только полезная информация;
· объединение траекторий, при этом первичная и вторичная обработка проводится на каждой позиции. Параметры траектории передаются в центр обработки, в результате которой отсеиваются «ложные» траектории.
Принято различать следующие группы МП РЛС:
· пространственно-некогерентные МП РЛС;
· активные пространственно-когерентные МП РЛС с кратковременной пространственной когерентностью;
· пассивные пространственно-когерентные МП РЛС, в которых используется излученный целью сигнал;
· пространственно-когерентные МП РЛС с продолжительной пространственной когерентностью.
Пространственно-разнесенные МП РЛС обладают следующими свойствами:
1. Высокие энергетические характеристики из-за использования энергии каждой передающей позиции всеми приемными.
2. Высокоточное измерение пространственного положения целей с использованием слабонаправленных антенн.
3. Возможность измерения не только трех координат, но и векторов скорости и ускорения.
4. Увеличение объема сигнальной информации для решения задач распознавания классов обнаруженных целей.
5. Повышение помехозащищенности от активных и пассивных помех.
6. Повышение живучести.
К недостаткам следует отнести следующее:
1. Необходимость совместного управления позициями.
2. Необходимость передачи данных по линиям связи.
3. Дополнительные требования по взаимной привязке.
4. Повышение требований к устройствам обработки.
5. Необходимость геодезической или навигационной привязки.
Таким образом, применение МП РЛС целесообразно при высоких требованиях к информативности, помехоустойчивости, живучести.
Дата добавления: 2021-02-19; просмотров: 989;
Поиск по сайту
Узнать еще
- I этап – обработка протокола
- II. Предстерилизационная обработка.
- А - решетчатая конструкция из бетонных элементов; б - пространственная георешетка; в - укрепление откоса георешеткой; 1, 2 - бетонные элементы; 3 - анкеры; 4 - тяжи анкеров
- А. Первичная обработка исходной статистики
- АВТОМАТИЗИРОВАННАЯ ОБРАБОТКА ДАННЫХ В СЛУЖБЕ ПРИЕМА И РАЗМЕЩЕНИЯ
- Автоматизированная обработка информации.
- Автоматизированная обработка информации.
- Адаптивная пространственная фильтрация активных помех

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
