Активные системы с активным ответом (вторичные РЛС)
Обеспечение безопасности полетов воздушных судов (ВС) требует непрерывного диспетчерского контроля на всех этапах выполняемых полетов. Основными источниками информации о воздушной обстановке в системах управления воздушным движением (УВД) являются системы первичной и вторичной радиолокации.
Широкое применение в гражданской авиации находят системы вторичной радиолокации (радиолокационные системы с активным запросом и активным ответом).
Такие системы представляет собой разнесенный в пространстве единый радиотехнический комплекс, состоящий из запросчика и ответчика, соединенных каналами связи (рис.4.212).
Запросчик излучает запросные сигналы, которые кодируются для исключения ложного запуска ответчика другими радиотехническими устройствами. Все запросные сигналы принимаются и декодируются приемником ответчика, установленным на объекте. При соответствии запроса установленному коду ответчик излучает кодированный ответный сигнал. Кодирование затрудняет имитацию ответных сигналов и повышает надежность работы системы.
Ответные сигналы принимаются и декодируются в приемнике запросчика. Устанавливая время и направление прихода ответных сигналов, находят дальность и угловые координаты воздушного судна, а также дополнительную полетную информацию: номер борта, высоту полета, запас топлива и др.
Для обнаружения запросного сигнала ответчиком с заданными качественными характеристиками необходимо выполнить условие:
, (4.114)
где Эпр. отв. – энергия принимаемого ответчиком запросного сигнала;
N0 отв. – спектральная плотность внутренних шумов приемника ответчика;
n – коэффициент видимости, определяемый по кривым обнаружения для нефлюктуирующего сигнала.
Рис.4.212. Радиолокационная система с активным запросом и ответом
Энергия принимаемого ответчиком запросного сигнала выражается следующей зависимостью:
, (4.115)
где Эз – энергия излучения передатчика запросчика;
Gз – коэффициент усиления антенны запросчика;
Аотв – эффективная площадь приема антенны ответчика;
rз – расстояние от запросчика до ответчика.
Дальность действия линии запроса
. (4.116)
Связав эффективную площадь приемной антенны ответчика с ее коэффициентом усиления
,
уравнение дальности линии запроса запишется в виде
. (4.117)
Аналогичным образом определяется дальность действия линии ответа
, (4.118)
где N0 з – спектральная плотность внутренних шумов приемника запросчика.
В системе активного ответа дальность действия при запросе должна быть равна дальности действия при ответе. Такая система называется сбалансированной. Условие баланса выражается следующим образом:
.
Дальность действия линии запроса и линии ответа определяются условиями радиосвязи. Поэтому даже при сравнительно низких энергетических потенциалах запросчиков и ответчиков реализуемые дальности действия значительны, а надежность обнаружения объектов и измерения координат высоки. Кроме этого системы вторичной радиолокации имеют следующие особенности.
1. Несущие частоты по каналам запроса и ответа выбираются различными, поэтому приемник запросчика не принимает маскирующие помеховые сигналы, отражения от «местных» предметов и гидрометеообразований. При этом отпадает необходимость применения систем селекции движущихся целей.
2. По каналу ответа с борта ВС в закодированном виде может быть передана любая дополнительная информация, необходимая для УВД.
Очевидным недостатком систем вторичной радиолокации является необходимость установки на борту ВС ответчика, параметры которого должны быть жестко согласованы с параметрами наземного запросчика.
Структура и принцип работы систем вторичной
радиолокации
По конструктивному выполнению вторичный радиолокатор может быть либо встроенным в первичный радиолокатор, либо автономным. В первом случае антенна вторичного радиолокатора совмещена с антенной первичной РЛС и вращается общим приводом. Во втором случае антенна вторичного радиолокатора приводится во вращение автономным приводом. Возможна совместная работа при синхронизации приводов вращения первичных и вторичных РЛС. Структурная схема системы вторичной радиолокации, совмещенной с первичной РЛС, изображена на рис.4.213.
f2
ЛПД
ПРИЕМНИК
ПОДАВЛЕН.
БОКОВЫХ
ЛЕПЕСТКОВ
ДЕШИФРАТОР
ИНДИКАТОР
ПРМ
ШИФРАТОР
ПРД
ПЕРЕДАТЧИК
ПОДАВЛЕНИЯ
БОК. ЛЕПЕСТ.
ЗАПРОСЧИК
ШИФРАТОР
ДЕШИФРАТОР
ПРМ
ОТВЕТЧИК
f1
ПРД
Рис.4.213. Обобщенная структурная схема системы
вторичной радиолокации
Шифратор вторичного радиолокатора под действием импульсов синхронизации от первичной РЛС (или автономно) формирует два импульса с заданным кодовым интервалом, который определяет содержание запрашиваемой информации. Передающее устройство преобразует эти видеоимпульсы в радиоимпульсы с несущей частотой запроса (fз = 1030 или 837,5 МГц), которые через антенный переключатель подводятся к антенне и излучаются в пространство. Диаграмма направленности антенны вторичного радиолокатора узкая в горизонтальной плоскости и широкая в вертикальной плоскости.
Самолетный ответчик состоит из антенно-фидерного устройства, распределительного фильтра (РФ), приемника и дешифратора запросных сигналов, шифратора ответных сигналов и передатчика. Запросные сигналы с антенны ответчика через разделительный фильтр поступают в приемник, где преобразуются, усиливаются по промежуточной частоте и детектируются. На выходе приемника ответчика образуется пачка парных импульсов запроса (рис.4.214). Временные кодовые интервалы между парными импульсами (tзк1, tзк2) определяют содержание информации, которую должен передать ответчик.
τзк2
τзк1
τзк2
τзк1
τзк1
Тn
U вых. прм
t
Рис.4.214. Сигналы запроса на выходе приемника СО: τзк1 и τзк2 –
временные интервалы запросных кодов; Тn – период повторения запросных сигналов
Запросные сигналы поступают на вход дешифратора, в котором производится декодирование запрашиваемой информации. В простейшем случае дешифратор представляет собой набор линий задержек со стандартными временными интервалами задержки и логических схем «И». В результате совпадения двух запросных импульсов в дешифраторе образуется управляющий импульс для шифратора. Шифратор формирует импульсы координатного и соответствующего информационного кода (бортового номера или высоты и др.). На информационные входы шифратора поступает информация от соответствующих датчиков. Шифратор формирует пачку ответных видеоимпульсов, в которой закодирована запрашиваемая информация. Эти импульсы поступают на вход передающего устройства, где преобразуются в пачку радиоимпульсов, которые через развязывающий фильтр поступают в антенну и излучаются в пространство. Несущая частота ответных сигналов (fо = 740 или 1090 МГц) отличается от несущей частоты запросных сигналов. Развязывающий фильтр выполняет функцию антенного переключателя и изготавливается обычно на полосковых линиях.
Ответные сигналы принимаются антенной, усиливаются приемником вторичного радиолокатора и декодируются дешифратором. В ответном сигнале имеются два координатных (опорных) импульса. По времени запаздывания этих импульсов относительно запросных с учетом времени задержки на кодирование и декодирование, определяется дальность до ответчика. Угловая координата ответчика определяется методом пеленгации по максимуму (в моноимпульсных системах метод иной и будет изложен ниже).
Дешифратор вторичного радиолокатора выделяет также дополнительную информацию, переданную ответчиком (бортовой номер, высота и др.), которая отображается на индикаторных устройствах.
В обобщенной структурной схеме изображены лишь основные устройства, поясняющие основной принцип действия системы вторичной радиолокации. Для обеспечения надежной работы системы как наземное, так и бортовое оборудование содержит дополнительные устройства, например, устройства, устраняющие влияние боковых лепестков диаграммы направленности антенны запросчика.
Системы подавления сигналов боковых лепестков
диаграмм направленности антенн
Мощность излучения по боковым лепесткам диаграммы направленности антенны (ДНА) запросчика негативно влияет на функционирование системы вторичной радиолокации. Ответчик на небольших расстояниях может принимать запросы, излучаемые боковыми лепестками ДНА. При большом числе ВС возможен прием «чужих» ответов по боковым лепесткам. Это все приводит к появлению дополнительных ложных отметок на индикаторах, неоднозначному определению азимута ВС и излишней загрузке ответчиков. Возможны два варианта исключения влияния боковых лепестков ДНА запросчика.
1. Излучение таких запросных сигналов, при которых ответный сигнал не излучается, если запрос послан по боковым лепесткам.
2. Подавление сигналов по боковым лепесткам ДНА при приеме.
Первый способ исключения влияния боковых лепестков реализуется на основе сравнения амплитуд запросных сигналов в ответчике, переданных запросчиком через основную антенну и специальную передающую антенну подавления. Система подавления может быть двухимпульсной и трехимпульсной.
Трехимпульсная система подавления является основной. Принцип ее работы заключается в следующем. Через основную остронаправленную в горизонтальной плоскости антенну запросчиком излучаются импульсы Р1 и Р3 (рис.4.215). Временной интервал запросных кодов между фронтами импульсов Р1 и Р3 (отношение мощностей этих импульсов не более 1,26, а напряжений 1,12) определяет вид запрашиваемой информации. Амплитуда импульса Р3 должна быть не более чем на 1дБ меньше амплитуды импульса Р1. Для исключения запросов по боковым лепесткам через антенну подавления с круговой или слабонаправленной ДН на той же частоте запроса излучается импульс подавления Р2. Этот импульс следует после импульса Р1 через 2±0,15 мкс. Амплитуда импульса Р2 в пределах желаемого сектора ответа (в направлении основного лепестка ДНА запросчика) должна быть на 9дБ меньше Р1. Во всех других направлениях (включая направления боковых лепестков) амплитуда Р2 должна быть больше либо равна амплитуде Р1. На рис.4.199 изображены области изменения амплитуды импульсов Р3»Р1 относительно Р2, в которых ответчик отвечает или не отвечает. При Р1≥Р2 + 9дБ (направление основного лепестка) ответчик должен отвечать. При Р1£Р2 (другие направления) ответчик должен не отвечать. В пределах области, где Р2<Р1<Р2+9дБ, ответчик может отвечать или не отвечать. Сравнение амплитуд импульсов Р1 и Р2 производится в устройстве подавления боковых лепестков (ПБЛ) ответчика, которое преобразует амплитудный признак сигнала правильного запроса в признак количественный (количество импульсов с выхода приемника поступающих на вход дешифратора).
Рис.4.215. Трехимпульсная система подавления
аб
б
Р3
Р2
Р2
Р1, Р3
при Р1>Р2+9дБ
ОТВЕЧАЕТ
при Р1<Р2
НЕ ОТВЕЧАЕТ
МОЖЕТ ОТВЕЧАТЬ
ИЛИ НЕТ ОТВЕЧАТЬ
Р1
Р2
Р3
t
при Р1<Р2
НЕ ОТВЕЧАЕТ t
а
Р1
При правильном запросе (Р1>Р2) импульс Р2 в схеме сравнения подавляется и на вход дешифратора поступают два импульса Р1 и Р3 с кодовым интервалом, соответствующим запросному коду. Дешифратор распознает этот код и выдает команду в шифратор на формирование ответных сигналов. При неправильном запросе (Р1<Р2) через схему сравнения амплитуд проходят все три импульса (Р1, Р2, Р3). Дешифратор декодирует временной интервал между импульсами Р1 и Р2, равный 2мкс, и формирует импульс БЛАНК ПБЛ длительностью 35±10 мкс. Этот импульс отключает выход устройства ПБЛ от входа дешифратора. Таким образом, второй импульс запросного кода (Р3) на вход дешифратора не поступает и ответчик запирается.
Подавление по каналу ответа. Вторичный радиолокатор (запросчик) кроме основной антенны имеет приемную антенну подавления и приемник подавления. Диаграмма направленности основной антенны в горизонтальной плоскости имеет узкие лепестки (рис.4.216, а), а ДНА подавления либо круговая, либо слабонаправленная, но перекрывает боковые лепестки основной антенны. Прием ответных сигналов осуществляется одновременно как по основному приемному каналу, так и по каналу подавления. Принятые сигналы (видеоимпульсы) U1 и U2 вычитаются, а их разность U3=U1–U2 через диод поступает в устройство обработки или в простейшем случае – на индикатор.
Если прием сигналов производится с направления основного лепестка а, то U1>U2, U3=U1–U2>0 и разностный сигнал через диод проходит на дешифратор (индикатор).
Если прием ответного сигнала производится с направления б бокового лепестка, то U1<U2, U3=U1–U2<0 и разностный сигнал отрицательной полярности через диод не проходит. Информация с направления боковых лепестков подавляется.
Эта система отличается простотой реализации, но ее применение сопровождается уменьшением дальности действия радиолокатора из-за ухудшения отношения сигнал/шум при вычитании сигналов.
t
t
U1
U3
U2
а
б
АП
ПРД
ПРМ
ОСН.
ПРМ
ПОДАВ.
СХЕМА
СРАВН.
U1
U2
U3
t
U1
U2
U3
t
t
t
в)
г)
Рис.4.216. Подавление по каналу ответа:
а) диаграммы направленности антенн; б) структурная схема;
в) прием с направления а; г) прием с направления б
а)
б)
Кроме того, в системе требуется линейность и идентичность амплитудных характеристик обоих каналов в динамическом диапазоне не менее 45дБ.
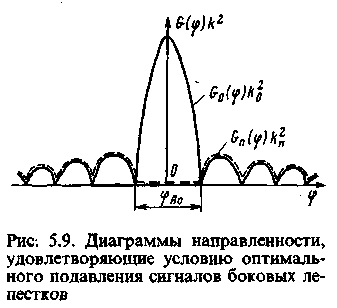
Для улучшения отношения сигнал/шум и повышения эффективности подавления сигналов боковых лепестков по всем направлениям, необходимо оптимизировать форму ДНА подавления. Для этого ДНА канала подавления должна иметь вид, изображенный на рис.4.217.
Устранение приема ложных ответов может достигаться и за счет применения временной автоматической регулировки усиления (ВАРУ). Усиление приемника нарастает с увеличением дальности так, чтобы обеспечить прием сигналов только по главному лепестку диаграммы направленности антенны.
Недостаток, связанный с жесткими требованиями к амплитудным характеристикам приемников, может быть устранен преобразованием амплитудных различий сигналов в фазовые, которые в меньшей степени зависят от изменения коэффициентов передачи приемных трактов.
Фазовая система подавления сигналов боковых лепестков основана на создании фазовых различий сигналов, принимаемых основным и дополнительным каналами. В такой системе в качестве критерия принадлежности сигнала, принятого основным или боковыми лепестками ДНА, используется соотношение амплитуд этих сигналов. Однако, для исключения влияния различий коэффициентов передачи приемных трактов (основного и подавления) это соотношение амплитуд преобразуется в фазовые соотношения. Принцип работы заключается в следующем. Сигналы, принятые основной антенной и антенной подавления, одновременно складываются и вычитаются. Образующиеся суммарный и разностный сигналы получают относительно друг друга определенные фазовые различия, которые в зависимости от направления приема будут иметь одно из двух возможных значений:
– при приеме с направления главного лепестка основной антенны угол между векторами суммарного и разностного сигналов будет острым (<900);
– при приеме сигналов с направления боковых лепестков угол между векторами суммарного и разностного сигналов будет тупым (> 900).
jг
–
+
а)
jбл.
–
+
б)
Рис.4.218. Векторные диаграммы при приеме в направлении главного (а) и бокового (б) лепестков
Сказанное иллюстрируется на рис.4.217. При приеме с направления главного лепестка сигнал, поступающий от основной антенны, превышает сигнал от антенны подавления. Сдвиг фаз jг между векторами суммарного и разностного сигналов будет 0£jг£900 (рис.4.218, а). При приеме с направления боковых лепестков сигнал, поступающий от основной антенны, будет всегда меньше сигналов, поступающих от антенны подавления. В этом случае (рис.4.218, б) угол между векторами суммарного и разностного сигналов будет тупым: 900<jбл£1800.
Суммарные и разностные сигналы, получившие фазовые различия в зависимости от направления приема, усиливаются в отдельных каналах промежуточной частоты, после чего фазовые соотношения вновь преобразуются в амплитудные. Суммарные и разностные сигналы сравниваются по фазе с помощью фазового детектора. При этом суммарные сигналы промежуточной частоты используются в качестве опорных и подаются на оба плеча детектора в фазе. Разностные сигналы промежуточной частоты поступают на плечи фазового детектора в противофазе. При приеме сигналов с направления главного лепестка продетектированное напряжение во втором плече нагрузки фазового детектора будет всегда больше продетектированного напряжения первого плеча нагрузки. При приеме сигналов с направления боковых лепестков ситуация становится обратной.
Если теперь после фазового детектора включить схему амплитудного сравнения сигналов первого и второго плеч нагрузки, то на выходе ее останутся сигналы только от тех объектов, которые находятся в зоне действия главного лепестка ДНА основного канала.
Рис.4.219. Схема подавления ложных ответов способом фазовых
различий сигналов
Недостатком схемы является неэффективность подавления сигналов с направления задних лепестков ДН основной антенны. Это объясняется тем, что по энергетическим соображениям создавать с помощью одной антенны подавления единую диаграмму направленности, перекрывающую все без исключения боковые лепестки, нецелесообразно.
Кодирование запросных и ответных сигналов.
Методы кодирования запросных и ответных сигналов
Для передачи информации во вторичных радиолокаторах применяется импульсное кодирование. Импульсный код – это совокупность импульсов, расположенных в соответствии с правилами кодирования. В качестве кодирующих признаков могут использоваться: длительность импульса, число импульсов, расстояние между импульсами, частота и фаза, наличие или отсутствие импульсов на определенных позициях. Интенсивность сигнала в качестве признака кодирования не используется из-за малой помехоустойчивости.
В существующих системах вторичной радиолокации используются два вида кодирования: времяимпульсное и позиционное.
Тk
Dtk
tu
t
u
Рис.4.220. Структура времяимпульсного
кода
Времяимпульсное кодирование применяется в запросном канале. При этом методе каждому из значений информации, подлежащей передаче, присваивается свой временной интервал. На рис.4.220 изображена структура времяимпульсного кода. На рисунке обозначены:
Тk – кодовый интервал;
Dtk – интервал кодирования.
Максимальное число двухимпульсных кодов N определяется следующим образом:
.
Времяимпульсные коды не могут дать большого числа кодовых комбинаций без значительного увеличения кодового интервала или увеличения числа импульсов в коде. Число вариантов запросных сигналов в системах вторичной радиолокации невелико, поэтому в запросном канале применяется двухимпульсное временное кодирование.
Ответная информация имеет значительно больший объем, поэтому в ответном канале применяется позиционное кодирование, при котором значение ответной посылки определяется местами расположения импульсов кода на временной оси. Ответная информация имеет постоянный объем, носителями информации являются десятичные и двоичные числа, для представления которых используется позиционная система счисления. В этой системе значения разрядов чисел зависят от места, отведенного каждой из цифр. Так, например, десятичное число 623 может быть представлено в виде:
.
Каждому разряду числа при этом соответствует своя позиция. Любое число в позиционной системе может быть записано следующим образом:
,
где an, … – коэффициенты слагаемых;
Р – основание системы.
При основании Р = 2 базисом числа являются две цифры: 0 и 1, а при Р=10 используются цифры 0, 1, …, 9.
Ответная информация с борта воздушного судна кодируется с использованием двоично-десятичной и двоично-восьмеричной системы счисления. Число значений N дискретной информации, которое может быть передано двоичным кодом, составляет N = 2m (m – разрядность кода). Передача символов 0 и 1 двоичных чисел может быть осуществлена импульсным сигналом (отсутствие или наличие импульса на определенной временной позиции). Двоично-десятичная система применяется в ответных кодах режима УВД (отечественный режим). Двоично-восьмеричный код имеет базис цифр 0, …, 7 и применяется для ответных кодов в режиме RBS (международный режим).
При передаче числа позиционным двоичным кодом каждому из его разрядов определено свое место (позиция). Существует два способа предоставления позиций (рис.4.221).
На рис. 4.221, а изображен четырехразрядный двоичный позиционный код с пассивной паузой. При этом каждому из четырех разрядов предоставляется одна временная позиция. Единица соответствует наличию импульса, нуль – его отсутствию. Во втором случае (рис.4.221, б) каждому из четырех разрядов двоичного числа предоставляется две временные позиции. Импульс на первой позиции обозначает «1», на второй – «0». Этот метод называется методом с активной паузой.
Рис.4.221. Позиционные четырехразрядные коды
б)
t
U
t
U
а)
1 2 3 4
Структура запросных сигналов
Кодирование запросных сигналов осуществляется с целью уменьшения вероятности срабатывания ответчика от случайных сигналов, а также для получения определенного вида информации по каналу ответа.
В существующих системах вторичной радиолокации применяются два формата стандарта кодирования (отечественный и международный). Передача кодированных сигналов по международным нормам ICAO производится только на несущих частотах 1030МГц (запрос) и 1090МГц (ответ). Отечественный стандарт устанавливает частоты: 837,5МГц (запрос) и 740МГц (ответ). Кодирование запросных сигналов в обоих форматах производится времяимпульсными кодами.
Запросный код состоит из двух импульсов, обозначаемых Р1 и Р3, с кодовым интервалом tзк между их фронтами. Кодовые интервалы и вид запрашиваемой информации представлены в табл. 1.
Сигналы запроса режима RBS имеют вертикальную поляризацию, режима УВД – горизонтальную. Для подавления сигналов боковых лепестков в трехимпульсной системе подавления по каналу запроса между импульсами Р1 и Р3 излучается импульс Р2, следующий через 2±0,15 мкс после импульса Р1. Длительность импульсов запросных кодов и импульса подавления составляет 0,8±0,1 мкс.
Таблица 1
Шифр кода
Временной код tзк (мкс)
Информационное содержание
сигналов от ответчиков
Код RBS
A
C
D
Код УВД
ЗК1
ЗК2
ЗК3
ЗК4
9,4
Опознавание ВС (бортовой номер)
Высота полета
Резерв
Бортовой номер ВС
Высота полета и запас топлива
Вектор путевой скорости
Координаты ВС
 , (4.114)
, (4.114) , (4.115)
, (4.115) . (4.116)
. (4.116) ,
, . (4.117)
. (4.117) , (4.118)
, (4.118) .
.




 сигналов будет 0£jг£900 (рис.4.218, а). При приеме с направления боковых лепестков сигнал, поступающий от основной антенны, будет всегда меньше сигналов, поступающих от антенны подавления. В этом случае (рис.4.218, б) угол между векторами суммарного
сигналов будет 0£jг£900 (рис.4.218, а). При приеме с направления боковых лепестков сигнал, поступающий от основной антенны, будет всегда меньше сигналов, поступающих от антенны подавления. В этом случае (рис.4.218, б) угол между векторами суммарного 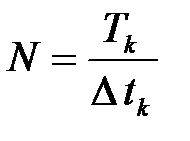 .
. .
. ,
,









