Активные системы с пассивным ответом (первичные РЛС)
Доплеровская РЛС непрерывного излучения – самая простая из всех. Именно по такому принципу были построены первые «радиоуловители» самолетов. Она содержит генератор высокочастотных колебаний (ГВЧ), передающую  и переменную
и переменную  антенны, смеситель и усилитель низкой частоты биений (УНЧ). На его выходе включаются либо наушники, либо частотомер (Рис.4.194).
антенны, смеситель и усилитель низкой частоты биений (УНЧ). На его выходе включаются либо наушники, либо частотомер (Рис.4.194).
Доплеровская РЛС не обнаруживает неподвижные предметы. Сигнал, отраженный от них имеет ту же самую частоту, что и излучаемый. Но если обнаруживаемый объект движется в направлении локатора или от него, частота отраженного сигнала изменяется вследствие эффекта Доплера (эффект Доплера – изменение длины волны λ (или частоты), наблюдаемое при движении источника волн относительно их приемника. Характерен для любых волн (свет, звук и т.д.). При приближении источника к приемнику λ уменьшается, а при удалении растет на величину  , где
, где  - длина волны источника, с – скорость распространения волны, v – относительная скорость источника).
- длина волны источника, с – скорость распространения волны, v – относительная скорость источника).
При радиолокации эффект Доплера проявляется вдвое сильнее. Самолет, летящий навстречу излучаемой локатором волне, встречает более частые колебания электромагнитного поля. Переизлучая их во время движения, он еще повышает их частоту. При удалении же самолета от локатора частота отраженного сигнала понижается. В приемную антенну попадают два сигнала: прямого прохождения (от излучающей антенны) и отраженный от цели. В смесителе они взаимодействуют, образуя разностную частоту биений, в точности равную доплеровской  , где
, где  - частота излучаемого сигнала.
- частота излучаемого сигнала.
Определить дальность доплеровским локатором нельзя, но если частоту излучаемых колебаний изменять в некоторых пределах, т.е. ввести в генератор частотную модуляцию, то появляется возможность измерить дальность. Первую опытную установку, действующую по такому принципу, построил известный ученый Б.К. Шембель и использовал ее при локации Крымских гор. Пусть частота передатчика изменяется по пилообразному закону. Частота отраженного сигнала будет изменяться также, но с запаздыванием на некоторое время t, время распространения волн до цели и обратно. Если частота передатчика в какой-то момент  равна
равна  , то отраженный сигнал возвращается с этой же частотой. Но частота передатчика к времени
, то отраженный сигнал возвращается с этой же частотой. Но частота передатчика к времени  успеет измениться до значения
успеет измениться до значения  , и в приемнике выделится сигнал биений с частотой
, и в приемнике выделится сигнал биений с частотой  .
.
Это частота тем выше, чем больше расстояние до цели. Частотно – модулированные локаторы нашли свое применение в авиации, на судах, а также для выполнения операции стыковки космических кораблей на орбите, обеспечивающие очень хорошую точность определения дистанции.
Явление вторичного излучения, лежащее в основе активной радиолокации, свойственно волнам любой природы. Оно возникает всякий раз, когда волна встречает препятствие на пути своего распространения. Падающую на препятствие волну называют первичной, отраженную или рассеянную – вторичной, а препятствие – пассивным вторичным излучателем. Препятствием для радиоволн является любая неоднородность электрических параметров среды: диэлектрической и магнитной проницаемости, или проводимости. Под действием электрического поля падающей волны на облучаемой поверхности, например проводящей, возникают колебания электрических зарядов. Наведенные при этом токи проводимости являются источником излучения вторичных электромагнитных волн. В диэлектрике таким же источником являются токи смещения.
При вторичном излучении радиоволн создаются различные распределения амплитуд и фаз токов на облучаемой поверхности в зависимости от соотношения размеров воздушного объекта и длины волны, что обусловливает различный характер интерференции создаваемых этими токами волн в различных точках пространства.
Интенсивность результирующего поля в точке приема, создаваемого в какой-либо момент времени, определяется только теми элементарными отражателями, которые расположены внутри одного разрешаемого объема пространства. Сигналы, принятые из соседних разрешаемых объемов, во времени не совпадают. В этой связи различают сосредоточенные вторичные излучатели и распределенные, занимающие в пространстве несколько разрешаемых объемов. Из класса сосредоточенных излучателей выделяют одиночные и групповые. Групповой вторичный излучатель состоит из ряда независимых одиночных. Интенсивность поля вторичного излучения характеризуется эффективной поверхностью вторичного излучателя, которая определяется следующим образом:
 , (4.108)
, (4.108)
где σ – эффективная поверхность вторичного излучения;
r – расстояние от объекта до приемника;
Sпр – плотность потока мощности вторичного излучателя;
Sц – плотность потока мощности первичной волны.
Величину σ называют также эффективной поверхностью рассеяния (ЭПР). Величина ЭПР в общем случае зависит от ориентации объекта относительно передатчика и приемника РЛС. Зависимость σ относительно направления на приемо-передатчик определяет диаграмму обратного вторичного излучения. Величина эффективной поверхности зависит от электрических свойств отражающих объектов, соотношения их геометрических размеров и длины волны, поляризационных характеристик антенн. Вторичное излучение носит локальный характер и создается отдельными элементами объекта отражения, которые называют «блестящими точками».
Вторичное излучение реальных объектов можно рассматривать как вторичное излучение совокупности п ≥ 2 «блестящих точек». Пусть, например, две связанные «блестящие точки» имеют векторы скорости, одинаково направленные на радиолокатор, но различающиеся по величине (рис.4.196, а). Тогда центр системы поступательно движется со средней радиальной скоростью
 .
.
Расстояние «блестящих точек» до радиолокатора в процессе движения меняется неодинаково. При облучении объекта гармоническим колебанием отраженный сигнал представляет собой результат интерференции двух колебаний, разность фаз которых непрерывно меняется. При этом будут меняться (флюктуировать) амплитуда и фаза результирующего колебания. Спектр сигнала расширяется (рис.4.197).
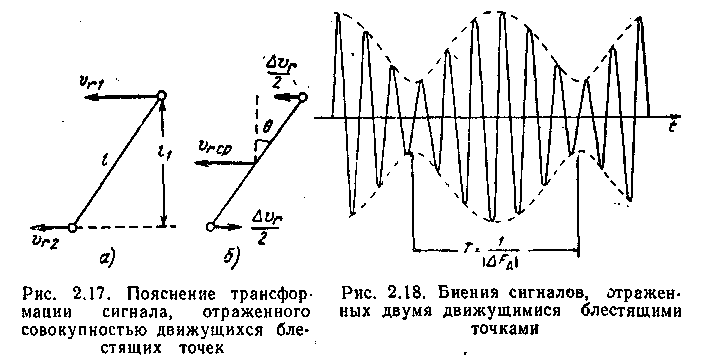
| Рис.4.196 Пояснение трансформации сигнала, отраженного совокупностью движущихся блестящих точек |
| Рис.4.197 Биения сигналов, отраженных двумя движущимися блестящими точками |
К аналогичным выводам придем, заменяя совокупность «блестящих точек» одним излучателем со сложной диаграммой обратного вторичного излучения (рис.4.198).
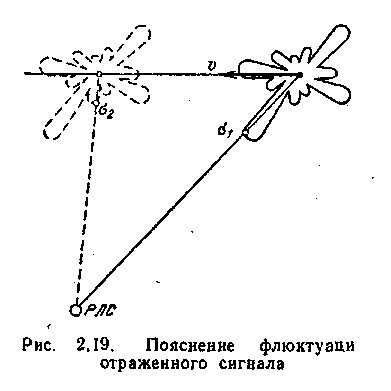
| Рис.4.198. Пояснение флюктуаций отраженного сигнала |
 , (4.109)
, (4.109)
где B(t) – комплексный модулирующий множитель, обусловленный изменением ракурса;
U(t) – огибающая сигнала;
f0 – несущая частота сигнала;
FД ср. – средняя доплеровская частота.
Большинство реальных воздушных объектов имеют размеры, значительно превышающие длину волны облучающих их колебаний. Конфигурация их поверхности сложна. Диаграммы обратного вторичного излучения реальных объектов имеют многолепестковый характер. Ширина лепестков зависит от отношения линейных размеров объектов к длине волны. Чем короче длина волны, тем уже лепестки диаграммы обратного вторичного излучения. На рис.4.199 изображены диаграммы обратного вторичного излучения самолета для различных длин волн.
Сложный характер диаграмм вторичного излучения реальных воздушных объектов обусловливает флюктуации амплитуды импульсов в пачке отраженного сигнала. На рис.4.200 изображены пачки отраженных сигналов для объектов, имеющих различное число «блестящих точек» (одиночный отражатель и самолет).
В активной радиолокации с пассивным ответом основными характеристиками воздушных объектов являются:
- среднее значение ЭПР  ;
;
- плотность распределения вероятности ЭПР р(σ) или плотность распределения амплитуды отраженного сигнала р(и);
- энергетический спектр флюктуаций отраженного сигнала N(F);
- скорость движения объекта;
- линейные размеры объекта;
- априорное распределение объектов в пространстве.
Все перечисленные характеристики являются статистическими. Характеристики р(σ) и N(F) могут быть определены экспериментально. Однако этот путь связан с большими практическими трудностями. Поэтому в большинстве случаев реальные объекты заменяют моделями, статистические характеристики которых близки к соответствующим реальным. Обратимся к некоторым моделям.
Объекты 1-го вида. К объектам 1-го вида относятся объекты без блестящей точки (без доминирующего отражателя) с медленными флюктуациями отраженных сигналов.
Под медленными понимают такие флюктуации, ширина спектра DFфл которых удовлетворяет условию
 , (4.110)
, (4.110)
где tз – время однократного обзора зоны;
Fп – частота повторения зондирующих импульсов.
Физическая модель – совокупность большого числа произвольно расположенных в ограниченном объеме равноценных независимых вторичных излучателей, относительная скорость перемещения которых обеспечивает выполнение условия .
Плотность распределения вероятности эффективной поверхности р(σ) объекта 1-го вида описывается экспоненциальным законом
 ,
,
а плотность распределения вероятности амплитуды отраженного сигнала – простым законом Рэлея
 ,
,
(здесь  – дисперсия мгновенных значений отраженного сигнала). Поэтому объект этого вида часто называют рэлеевским.
– дисперсия мгновенных значений отраженного сигнала). Поэтому объект этого вида часто называют рэлеевским.
Сигнал, отраженный от объекта 1-го вида, флюктуирует по амплитуде от нуля до максимального значения от обзора к обзору; в пределах времени облучения объекты флюктуации практически отсутствуют.
К объектам 1-го вида относятся все реактивные самолеты при обнаружении их одночастотными РЛС сантиметрового диапазона.
Объекты 2-го вида. Объекты 2-го вида отличаются от объектов 1-го вида лишь большей скоростью флюктуаций отраженного сигнала. Ширина спектра флюктуаций сигнала для таких целей соизмерима с частотой повторения зондирующих импульсов РЛС:
 . (4.111)
. (4.111)
Флюктуации, ширина спектра которых удовлетворяет условию  , называются быстрыми. Сигнал, отраженный от объекта 2-го вида, флюктуирует по амплитуде от нулевого до максимального значения от импульса к импульсу в пачке.
, называются быстрыми. Сигнал, отраженный от объекта 2-го вида, флюктуирует по амплитуде от нулевого до максимального значения от импульса к импульсу в пачке.
К объектам 2-го вида относятся легкие вертолеты при обнаружении их одночастотными РЛС, все типы вертолетов и самолетов при обнаружении их РЛС с перестройкой по частоте от импульса к импульсу на величину Df > c/2lц (здесь с – скорость света). В некоторых случаях к объектам 2-го вида относятся также и гидрометеообразования.
Объекты 3-го вида. К объектам 3-го вида относятся объекты с блестящей точкой и медленными флюктуациями отраженных сигналов.
Физическая модель – шар в облаке элементарных вторичных излучателей, суммарная эффективная поверхность которых соизмерима с эффективной поверхностью шара, а скорость взаимного перемещения элементарных излучателей обеспечивает выполнение условия . Плотность вероятности эффективной поверхности объекта 3-го вида подчиняется закону c2-квадрат с четырьмя степенями свободы
 .
.
Отраженный сигнал флюктуирует по амплитуде от минимального (не равного нулю) до максимального значения от обзора к обзору; в пределах времени облучения объекта флюктуации практически отсутствуют.
К объектам 3-го вида относятся реактивные самолеты при обнаружении их РЛС метрового диапазона и РЛС с многочастотными зондирующими сигналами, лесистая и гористая местность.
Объекты 4-го вида. Объекты 4-го вида отличаются от объектов 3-го вида большей скоростью флюктуаций отраженного сигнала. Сигнал флюктуирует по амплитуде от минимального (не равного нулю) до максимального значения от импульса к импульсу пачки. Ширина спектра флюктуаций сигнала удовлетворяет условию  .
.
К объектам 4-го вида относятся турбовинтовые самолеты и тяжелые вертолеты при обнаружении их одночастотными РЛС.
Объекты 5-го вида. К объектам 5-го вида относятся нефлюктуирующие объекты (шар).
Характер объектов отражения обусловливает изменение вероятности их обнаружения при одном и том же значении порога обнаружения. При малом значении порога обнаружения, которому соответствует высокая вероятность обнаружения, и одном и том же отношении сигнал-шум с наибольшей вероятностью обнаруживаются нефлюктуирующие сигналы (объекты 5-го вида), с наименьшей – объекты без «блестящей точки» (объекты 1-го и 2-го вида). При большом значении порога обнаружения, которому соответствует низкая вероятность обнаружения, наоборот, при одном и том же отношении сигнал-шум с наибольшей вероятностью обнаруживаются объекты без «блестящей точки», а с наименьшей – нефлюктуирующие сигналы.
Для качественной оценки влияния степени флюктуаций отраженных сигналов на вероятность обнаружения воздушных объектов рассмотрим два случая обнаружения при больших и малых отношениях сигнал-шум.
В первом случае для обнаружения объекта можно использовать критерий, при котором хотя бы один импульс из пачки превышает порог обнаружения. При такой логике вероятность обнаружения медленно и быстро флюктуирующих сигналов будет
где Р1 – вероятность того, что амплитуда отраженного импульса превысит порог обнаружения;
М – число импульсов в пачке.
Таким образом, вероятность обнаружения быстро флюктуирующих сигналов при одном и том же достаточно большом отношении сигнал-шум выше вероятности обнаружения медленно флюктуирующих сигналов.
В случае малых отношений сигнал-шум, близкой к оптимальной является логика обнаружения «М из М». Тогда
При малых отношениях сигнал-шум медленные флюктуации обеспечивают более высокую вероятность обнаружения по сравнению с быстрыми.
На рис. 4.201 изображены графики, количественно иллюстрирующие влияние степени флюктуаций отраженных сигналов на качество обнаружения воздушных объектов.
При вероятностях обнаружения, близких к 0,3 – 0,4, незнание степени флюктуаций сигналов не приводит к существенным ошибкам при расчете параметров РЛС. При значительно больших вероятностях незнание характеристик приведет к существенным ошибкам.
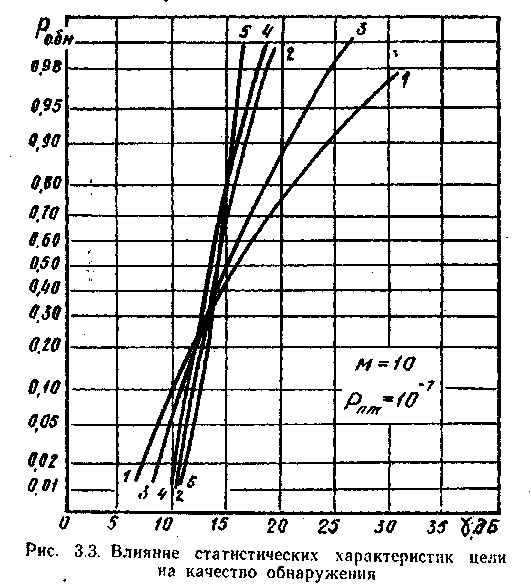
| Рис.4.201. Влияние статистических характеристик цели на качество обнаружения |
Дата добавления: 2021-02-19; просмотров: 814;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Определение, виды радиоактивности, радиоактивные семейства
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
