Биполярная линейная система координат для DISTO
В плоской биполярной (линейной) системе координат положение пункта M (M*) может быть определено с точностью до преобразования симметрии двумя прямолинейными отрезками  и
и  относительно полюсов P₁ и P₂, удаленных друг от друга на расстояние B (базис). Поскольку положение определяемого пункта неоднозначно, то во время съемки должна быть получена дополнительная информация относительно области расположения объекта.
относительно полюсов P₁ и P₂, удаленных друг от друга на расстояние B (базис). Поскольку положение определяемого пункта неоднозначно, то во время съемки должна быть получена дополнительная информация относительно области расположения объекта.
| Рис.1.9. Биполярная (линейная) система координат |
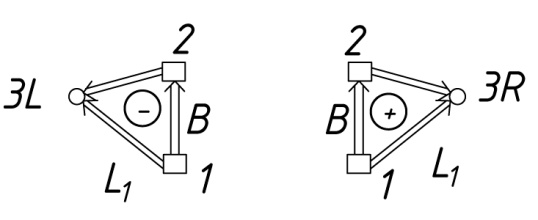
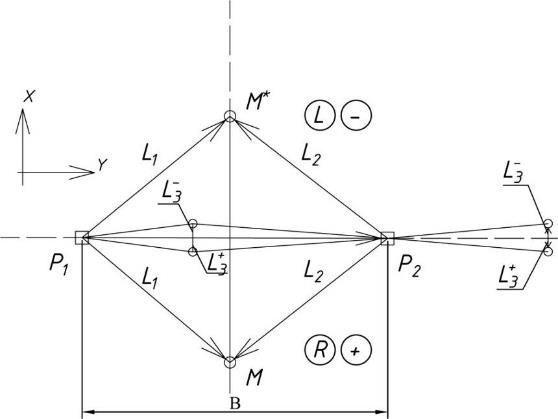 Если придать линии полюсов направление, например P₁ - P₂ (рис. 1.9), то всю плоскость можно разделить на две полуплоскости (области): левую (L) и правую (R). Левой соответствует знак «-», а правой «+». Это следует из того, что треугольник P₁ P₂M* отрицательно ориентированный, а треугольник P₁ P₂M – положительно ориентированный. Принцип выбора знака фигуры дополнительно показан на рисунке 1.10.
Если придать линии полюсов направление, например P₁ - P₂ (рис. 1.9), то всю плоскость можно разделить на две полуплоскости (области): левую (L) и правую (R). Левой соответствует знак «-», а правой «+». Это следует из того, что треугольник P₁ P₂M* отрицательно ориентированный, а треугольник P₁ P₂M – положительно ориентированный. Принцип выбора знака фигуры дополнительно показан на рисунке 1.10.
При измерениях координат и  , а также базиса B всегда присутствует погрешность. Даже при использовании высокоточных лазерных приборов не исключена погрешность центрирования, то есть расположения их над точкой местности во время измерения. Эти погрешности могут оказаться недопустимыми в зависимости от положения пункта M (M*). В этом случае можно говорить о снижении устойчивости наблюдаемого пункта в некотором направлении. Здесь под устойчивостью понимается многократное возрастание погрешности декартовых координат по сравнению с погрешностями биполярных координат. Теоретическое рассмотрение этого вопроса можно найти в п. 1.10.
, а также базиса B всегда присутствует погрешность. Даже при использовании высокоточных лазерных приборов не исключена погрешность центрирования, то есть расположения их над точкой местности во время измерения. Эти погрешности могут оказаться недопустимыми в зависимости от положения пункта M (M*). В этом случае можно говорить о снижении устойчивости наблюдаемого пункта в некотором направлении. Здесь под устойчивостью понимается многократное возрастание погрешности декартовых координат по сравнению с погрешностями биполярных координат. Теоретическое рассмотрение этого вопроса можно найти в п. 1.10.
Пусть биполярная система ассоциирована с плоской прямоугольной X – Y (рис. 1.9). Тогда при удалении от линии полюсов устойчивость будет снижаться вдоль оси Y. При приближении к линии полюсов устойчивость будет снижаться вдоль оси X.
| Рис. 1.10. Выбор знака фигуры |
 Для иллюстрации сказанного рассмотрим пример, обнаруженный при проведении экспериментов на местности. Длина базиса составляет значение B = 61,970 м. Расстояния до пункта M, измеренные лазерным дальномером, составили
Для иллюстрации сказанного рассмотрим пример, обнаруженный при проведении экспериментов на местности. Длина базиса составляет значение B = 61,970 м. Расстояния до пункта M, измеренные лазерным дальномером, составили  и
и  .
.
Расчет показывает, что расстояние от снимаемой точки до линии базиса составит значение 0,525 м.
С другой стороны, если предположить, что погрешность центрирования составила всего 12 мм, то снимаемая точка M могла находиться на линии базиса, так как

Таким образом, общая погрешность определения координат и  , а возможно и базиса в 12 мм привела к погрешности положения в 525 мм, то есть в 44 раза.
, а возможно и базиса в 12 мм привела к погрешности положения в 525 мм, то есть в 44 раза.
При расположении снимаемых пунктов на линии базиса все треугольники вырождаются в линии и меняется расчетная схема. Устойчивость положения при этом восстанавливается. Однако этот случай требует специального инструментального доказательства.
При приближении к линии базиса устойчивость положения может быть повышена путем измерения третьей координаты  ⁺ и ⁻ (см. рис. 1.9).
⁺ и ⁻ (см. рис. 1.9).
Дата добавления: 2016-11-26; просмотров: 2328;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
