Прибор И-1 (индикатор).
Индикатор предназначен для воспроизведения на экране индикатора первичной информации об окружающей надводной обстановке и определения координат надводных объектов при решении навигационных задач.
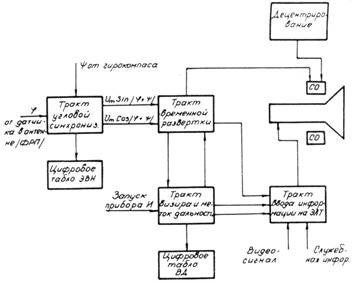
Рис.4 Структурная схема прибора И.
Тракт угловой синхронизации предназначен для получения на индикаторе, высокой точности угла поворота антенны, формирования электронного визира направления и сопряжения с изделиями «МЗО» и «Ольха». Точность воспроизведения угла поворота обеспечивается цифровым представлением и сохранением угловой величины.
В процессе работы тракта происходит сравнение, угловой и нулевой величины, вырабатываемой тактовым генератором блока фазоследящей системой и угловой и нулевой величины поступающей от фотоэлектронного растрового преобразователя, расположенного в приборе А (Антенне РЛС). Такой способ позволяет обеспечить необходимую синхронихацию вращения антенны и развёртки на экране РЛС, и избежать накопления ошибки от оборота к обороту антенны. Этим же способом обеспечивается отметка курса на экране, в момент пересечения антенной ДП судна.
Тактовым генератором и растровым преобразователем антенны за один её оборот вырабатывается 3600 импульсов, что позволяет получить точность угла поворота равную 0,1°
Для передачи на индикатор данных об угловом положении электронного визира (он устанавливается вручную, на пульте управления РЛС) используется счётчик визира. При записи счётчиком визира числа 3600 вырабатывается импульс, который после ряда согласований и преобразований на дешифраторе в виде углового значения поступает на цифровое табло.
Тракт временной развёртки предназначен для формирования радиально-круговой развёртки и развёртки электронного визира направления
Основными элементами тракта является блок СК (синхронный коммутатор); блок КР (канал развёртки) и блок Д (Децентратор)
На блоке СК из блока МД (меток дальности) поступает импульс, который с помощью делителя частоты формирует запускающий импульс канала основной развёртки и канала электронного визира направлений.
Кроме указанных, коммутатор СК формирует импульсы развёртки, поступающие на вход модулятора канала развёртки и импульс подсвета, для подсвета лини развёртки ЭЛТ на время прямого хода основной развёртки или электронного визира направлений.
Канал развёртки (КР) модулирует импульсы, поступающие на отклоняющие катушки по оси Х и отклоняющие катушки по оси У.
Для смещения начала развёртки на индикаторе используется блок Д (блок децентрирования).
Тракт формирования визира и меток дальности предназначен для формирования подвижного визира дальности, посредством которого обеспечивается оценка дальности до объекта.
С целью уменьшения погрешности измерения дистанции из-за нечёткой синхронизации импульсов запуска и тактовым импульсом, в схеме использован метод усреднения 100-кратного измерения. При измерении применён цифровой метод, информация в десятичном коде, через дешифратор подаётся на цифровое табло визира дальности.
Изменение масштабов осуществляется переключателем шкал дальности.
Тракт ввода информации на ЭЛТ предназначен для усиления видеосигналов, поступающих от приемопередатчика, обеспечения улучшения различимости целей на фоне помех от волнения и осадков, формирования импульсов и управления их яркостью при прямом ходе луча на ЭЛТ, а также смешивания видеосигнала с импульсами МД; ВД; ОК; ЭВН.
Основным блоком тракта является видеопроцессор – 1 с его выхода видеосигнал подается непосредственно на катод ЭЛТ.
Видеопроцессор работает в двух режимах: ручном и автоматическом. В ручном режиме (кнопка «ВИДЕОПРОЦЕССОР» на пульте управления индикатора отключена) цепи ВРУ (компенсация отражения от морской поверхности) и МПВ (компенсация отражений от дождя) управляется вручную потенциометрами на пульте управления индикатора.
При автоматическом режиме (кнопка ВИДЕОПРОЦЕССОР включена) цепи ВРУ и МПВ переходят от ручного управления на автоматическое.
Работа станции.
Работа станции основана на принципе направленного излучения коротких импульсных радиосигналов, отражения этих сигналов от объектов и направленного приема отраженных сигналов с последующим их преобразованием.
Излучение сигналов передатчика осуществляется антенной. Объекты, находящиеся в зоне радиолуча, отражают часть падающей на них энергии в обратном направлении, которая принимается антенной станции в паузах между излучением.
Направление на объект, совпадающие с направлением радиолуча, определяется по положению излучателя антенны в пространстве.
Дальность до объекта определяется измерением времени запаздывания отраженных от объектов сигналов относительно момента излучения зондирующего импульса антенной.
Радиально-круговая развертка на экране индикатора вращается синхронно и синфазно с вращением антенны. При облучении объектов на экране индикатора появляются яркостные отметки от целей.
В момент прохождения антенной диаметральной плоскости судна на экране индикатора высвечивается курсовая линия-отметка курса.
Изображение на экране индикатора ориентируется относительно диаметральной плоскости судна (по курсу) или меридиана (по северу).
Для измерения направления на объект предусмотрены электронный и механический визиры направлений. Отчет значения направления снимается с цифрового табло для варианта с электронным визиром и - по шкале азимутального круга для варианта с механическим визиром направления.
Для измерения расстояния до объекта предусмотрены визир дальности и неподвижные метки дальности. Отсчет дистанции, измерений с помощью визира дальности, снимается с цифрового табло.
При поступлении на модулятор передатчика (блок М) запускающих импульсов прибора П формируются модулирующие импульсы высокого напряжения, которые подаются на катод магнетрона- генератора СВЧ.
Под воздействием модулирующих импульсов магнетрон генерирует высокочастотные колебания, поступающие через ферритовый циркулятор блока СВЧ на выход прибора П и далее через волноводный тракт в прибор А. В прибор А СВЧ энергия поступает через вращающийся переход (блок ПВ) в щелевую, диэлектрическую антенну (блок АШД), в которой формируется в узкий луч и излучается в пространство.
Часть энергии, просачивающаяся через разрядник защиты приемника в блоке СВЧ, в виде сигнала попадает в канал приемника НРЛС и после обработки отображается на экране ИКО в виде яркостной отметки, которая используется для совмещения с ней (с моментом зондирования) начала развертки.
Отраженные от объектов сигналы СВЧ энергии принимаются той же антенной в паузах между излучением зондирующих импульсов и передаются по волноводному тракту в прибор П, а затем через ферритовый циркулятор И разрядник в смеситель УПЧ.
На смеситель УПЧ поступают также колебания гетеродина.
Преобразованные по частоте (промежуточная частота 60 МГц), отраженные сигналы усиливаются и детектируются в каскадах блока УПЧ, и преобретают линейно-логарифмический характер.
С выхода УПЧ продетектированные сигналы поступают на вход видеоусилителя прибора И и после усиления – на электронно-лучевую трубку.
С помощью блоков ВУ-Р и ВР-А (видеоусилители) обеспечивается в ручном и автоматическом режимах работа этих видеоусилителей и возможность различимости целей на экране индикатора на фоне помех от морского волнения и атмосферных осадков.
Часть энергии зондирующего сигнала с выхода генератора СВЧ отводится в блоке СВЧ на смеситель АПЧ, на который также подается СВЧ энергия от гетеродина.
С выхода смесителя АПЧ сигнал разностной частоты поступает в блок АПЧ, усилитель которого настроен на промежуточную частоту приемника 60 МГц. При отклонении разностной частоты от номинального значения 60 МГц на выходе блока появляется сигнал ошибки в виде постоянного напряжения соответствующей полярности, которое поступает на гетеродин (генератор Ганна) для изменения его частоты в сторону, соответствующую уменьшению отклонения разностной частоты от промежуточной.
Для передачи на индикатор данных об угловом положении антенны используется фотоэлектронный растровый преобразователь, установленный на валу антенны.
В блоке ПА (память антенны) аналоговой памятью формируются синусоидальное и косинусоидальное напряжения Um sınφ, Um cosφ основной развертки, синхронно и синфазно меняющиеся с вращением антенны. Указанные напряжения поступают на диодные мосты блока СК.
При ориентации изображения по меридиану с помощью блоков Ф и ОС прибора И в напряжение углового положения антенны Um sınφ, Um cosφ вводится поправка на курс своего судна ψ, поступающая от гирокомпаса, - Um sın (φ+ψ), Um cos (φ+ψ).
Для передачи на индикатор данных об угловом положении электронного визира направления служит блок ЭВН. Аналоговой памятью в блоке формируются синусоидальное и косинусоидальное напряжения Um sın θ, Um cos θ развёртки электронного визира, которые подаются на диодные мосты блока СК.
Управление диодным мостами осуществляется коммутатором, обеспечивающем формирование напряжения основной развертки и напряжения электронного визира в отношении 1: 50.
Импульсы развёртки трапециевидной формы, формирующиеся в блоке СК, подаются на модулятор в блок КР, канал Х и канал У. На вторые входы модулятора подаются напряжение основной развёртки и напряжение электронного визира. Промодулированные импульсы развертки после предварительного усиления по току поступает на оконечные каскады, нагруженные на отклоняющие катушки.
Смещение центра вращения развёртки на экране ИКО осуществляется с помощью блока Д. Сигнал поступает на оконечные каскады, нагруженные на отклоняющие катушки децентрирования.
Метки дальности формируются в блоке МД, электронный визир дальности – в блоке ВД.
В блоке МД импульсом запуска запускается генератор тактовых импульсов, частота которого делится в соответствии с масштабом меток дальности. Переключение масштаба меток дальности осуществляется переключателем шкал дальности.
Для формирования визира дальности применен цифровой метод измерения дистанции с усреднением результатов измерения после 100-кратного замера.
Дата добавления: 2021-02-19; просмотров: 779;
Поиск по сайту
Узнать еще
- Автоматические регуляторы и контрольно-измерительные приборы
- АВТОМАТИЧЕСКОЕ ОТТАИВАНИЕ ИНЕЯ С ОХЛАЖДАЮЩИХ ПРИБОРОВ
- Аккумуляторная батарея: назначение, тип батареи и его расшифровка. Параметры аккумуляторной батареи. Приборы контроля батареи.
- Аналоговые и цифровые вторичные приборы ГСП.
- Аппаратура эры дискретных полупроводниковых приборов- это аппаратура третьего поколения.
- Аппараты защиты бытовых приборов и промышленного электрооборудования
- Базовые операции технологического процесса изготовления твердотельных приборов и интегральных схем
- Виды столовой посуды и приборов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
