Исследование динамических режимов работы ЭП
Математическая модель привода.Для определения характера прохождения переходных процессов системы в переходных режимах необходимо определить коэффициенты характеристического уравнения системы в операторной форме:
 , (2.6.27)
, (2.6.27)
где ТМ – механическая постоянная времени системы; ТЭ – электромагнитная постоянная времени. Определить постоянные времени можно с помощью следующих выражений:
 (с), (2.6.28)
(с), (2.6.28)
 (с), (2.6.29)
(с), (2.6.29)
где  (рад/с).
(рад/с).
 (с),
(с),  ,
,
а это значит, что переходные процессы в системе должны иметь колебательный характер.
Выбор модели и моделирование переходных процессов.Для моделирования ЭП используется система MatLab (матричная лаборатория) с расширением (Toolboxes). Основными пакетами расширения, используемыми для исследовании ЭП, являются Simulink и Power System Blockset.
В исследуемую модель (рис. 2.19) вошли такие элементы:
- Asynchronous Machine SI Unit – модель асинхронного двигателя с номинальными паспортными данными двигателя 5А – 5АМ315M4У3 (задание параметров рис. 2.18);
- 3 источника синусоидального напряжения AC Voltage Sourse с номинальными параметрами: f=50 Гц, Um=311 В; сдвинутые по фазе друг относительно друга на 1200;
- Three-Phase V-I Measurement – трехфазный мультиметр для замеров сетевого тока и напряжения;
- 2 элемента типа Scope – модели осциллографов для просмотра графиков сетевых тока и напряжения, а также изменения во времени частоты вращения ротора двигателя и момента на его валу;
- 2 элемента типа Display для контроля установившегося значения тех же параметров;
- Step – элемент, с помощью которого, возможно смоделировать наброс нагрузки на вал двигателя в определенный момент времени.
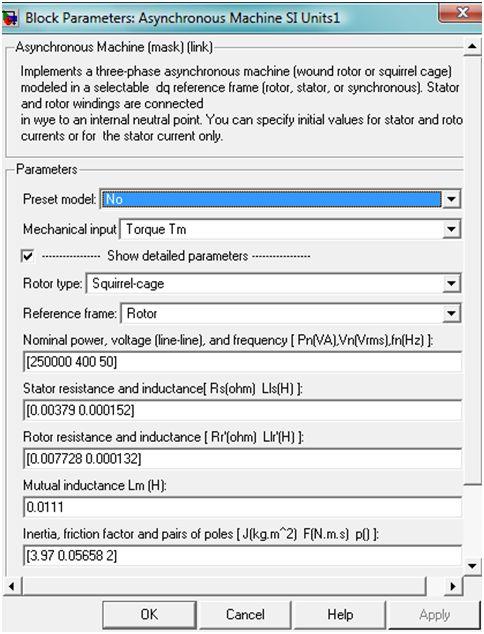
Рис. 2.18. Блок задания параметров асинхронного двигателя
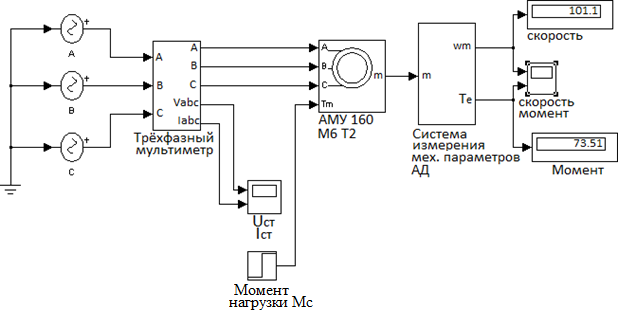 Рис. 2.19. Модель системы ПЧ-АД для программного пакета MatLab
Рис. 2.19. Модель системы ПЧ-АД для программного пакета MatLab
Моделируем пуск двигателя без нагрузки при трех различных частотах питающего напряжения f1=50 Гц, f2=37,5 Гц, f3=25 Гц, используя закон частотного регулирования  .
.
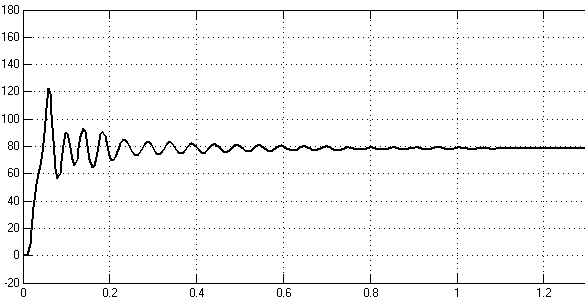
При f=50 Гц и Uл=380 В; при f=37,5 Гц и Uл=329 В; при f=25 Гц и Uл=269 В. При частоте питающей сети f=50 Гц и линейном напряжении Uл=380 В получаем следующие графики переходных процессов ω=f(t) (рад/с) и Mв=f(t) (Нм).
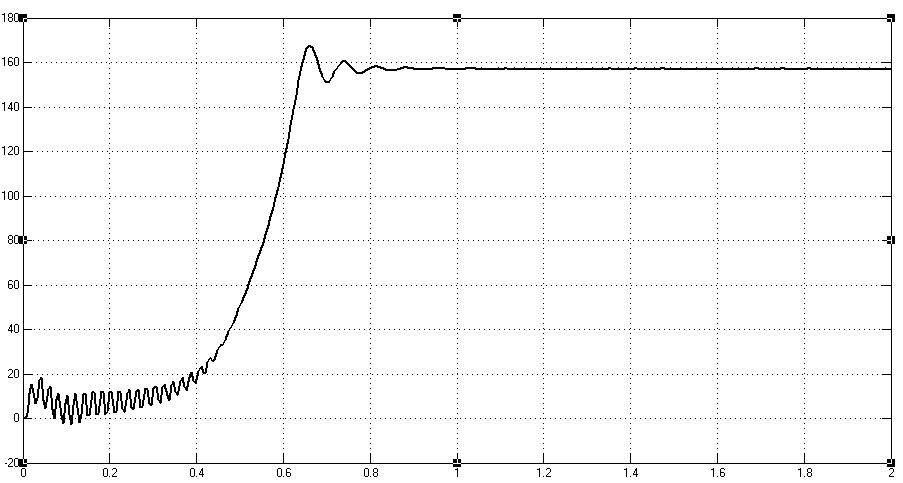
а
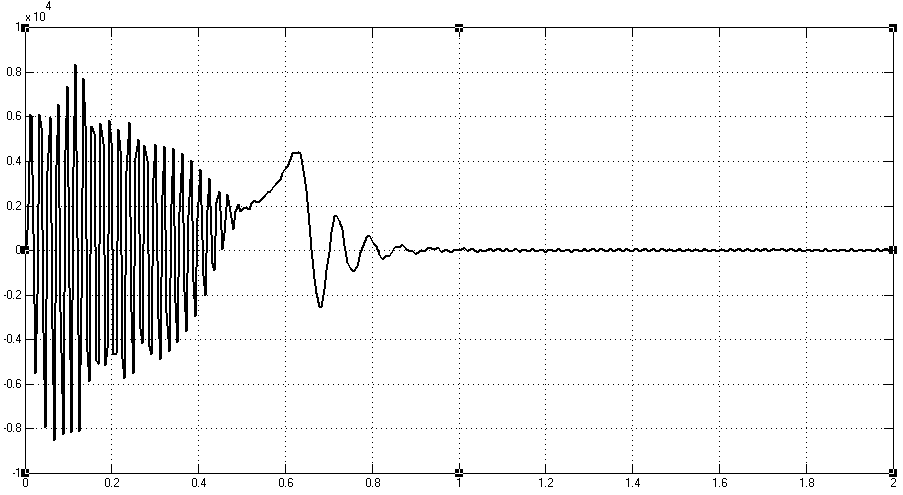
б
Рис. 2.20. Графики при частоте питательной сети f = 50 Гц:
а – ω = f(t); б – Mв = f(t)
После окончания переходного процесса получаем такие установившиеся значения: ω =157,1 рад/с; I1=60 А; Mв=27,2 Нм. При частоте сети f=37,5 Гц и линейном напряжении Uл=329 В получаем следующие графики переходных процессов ω = f(t) (рад/с) и Mв = f(t) (Нм).
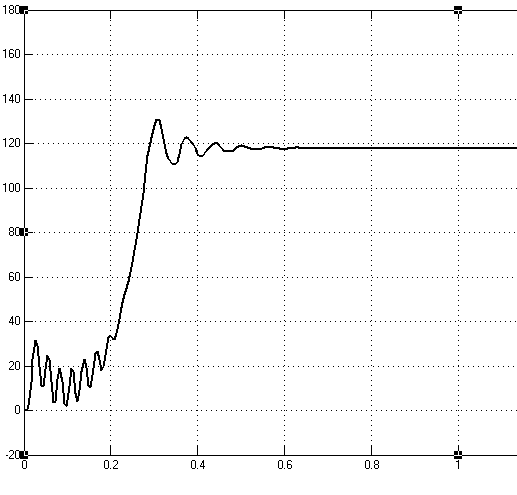
а
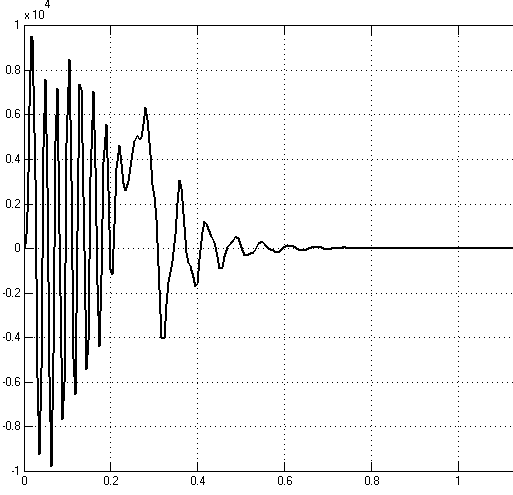
б
Рис. 2.21. Графики при частоте питательной сети f = 37,5 Гц: а) ω = f(t); б) Mв = f(t)
После окончания переходного процесса получаем такие установившиеся значения: ω =117,8 рад/с; I1=120 А; Mв=7,665 Нм при частоте питающей сети f=25 Гц и линейном напряжении Uл=269 В получаем следующие графики переходных процессов ω=f(t) (рад/с) и Mв=f(t) (Нм).
После окончания переходного процесса получаем такие установив 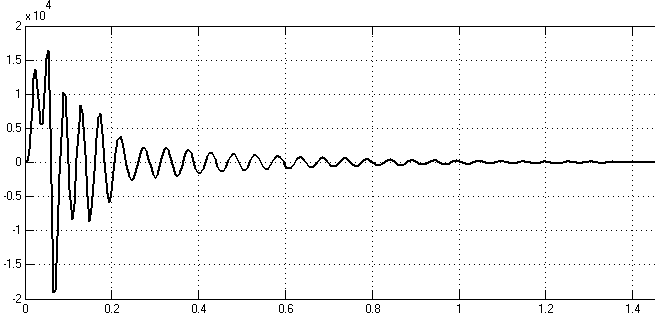 шиеся значения: ω =52,36 рад/с; I1=10,29 А; Mв=0,036 Нм.
шиеся значения: ω =52,36 рад/с; I1=10,29 А; Mв=0,036 Нм.
а
б
Рис. 2.22. Графики при частоте сети f=37,5 Гц и f=25 Гц:
а – ω=f(t); б – Mв=f(t)
При частоте питающей сети f=50 Гц и линейном напряжении Uл=380 В смоделируем переход системы из одного установившегося состояния (Мв = Мн = 73 Н·м, ω = ωн = 101,7 рад/с, I1 = I1н = 15,65 А) в другое после наброса нагрузки на вал двигателя (Мс.доп.= 0,3Мн = 22 Нм).
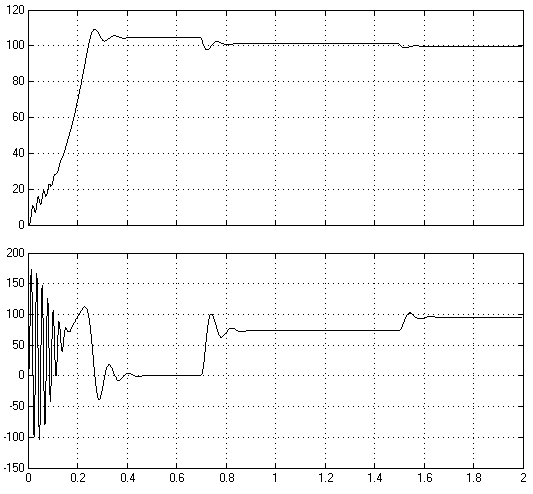
Рис. 2.23. Наброс нагрузки Мс.доп.=0,3Мн
После окончания переходного процесса получаем такие установившиеся значения: ω =99,7 рад/с; I1=20,06 А; Mв=95,5 Н·м.
Для более детального изучения переходного процесса на рис. 2.24. приведена увеличенная часть графиков ω=f(t) (рад/с) и Mв=f(t) (Нм), охватывающая только момент замедления двигателя после наброса дополнительной нагрузки.
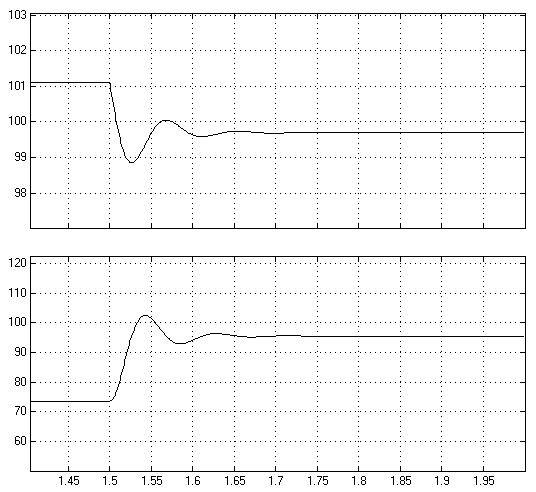
Рис. 2.24. Наброс нагрузки Мс.доп.=0,3Мн (фрагмент)
Дата добавления: 2021-01-26; просмотров: 643;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III. Исследование личностных особенностей подростков
- Im7im9im11Исследование памяти
- IV. Выполнение работы
- IV. Выполнение работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
