Построение графа переходов
Задача составления графа переходов многозначна, один из вариантов графа представлен на рис. 6.4. Вершины графа соответствуют состояниям схемы. Номера соответствуют их двоичному коду. В исходном состоянии все исполнительные устройства выключены, вторичные переменные равны 0 (0000).
При поступлении сигнала "Z" происходит переход системы в следующее состояние (0001), в котором обеспечивается включение электродвигателя М1. Захват опускается.
Сигнал К1 переводит схему в состояние (0011), в котором обеспечивается срабатывание захвата. Сигнал S1 переключает схему в состояние (0010). Электродвигатель М1 поднимает захват. При появлении сигнала К2 система переходит из состояния (0010) в состояние (0110), в котором электродвигатель М2 работает вперед. Рука манипулятора вместе с захватом поворачивается по часовой стрелке (если смотреть сверху).
При появлении сигнала К4 система переходит в состояние (1110). В этом состоянии обеспечивается включение электродвигателя М1. Захват опускается. Сигнал К1 переводит схему в состояние (1010), в котором захват разжимается, о чем сигнализирует сигнал S2.
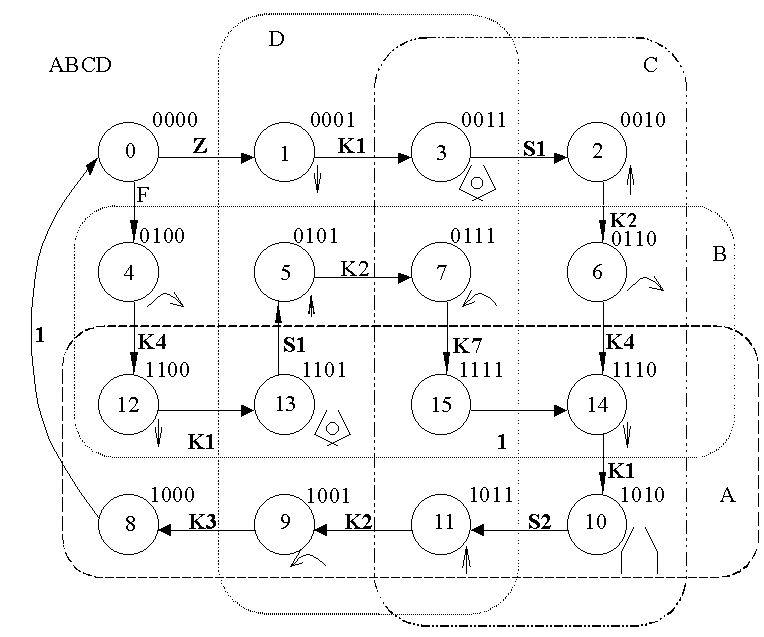
Рис. 6.4. Граф переходов манипулятора
Схема переходит в состояние (1011), рука поднимается, и в момент появления сигнала датчика К2 схема переходит в состояние (1001), включается реверс двигателя поворота М2 и рука возвращается в исходное положение, о чем сигнализирует датчик К3, который переводит схему в состояние (1000). Это состояние является пустым и переход из него в исходное состояние схемы осуществляется подачей единичного сигнала "1".
При поступлении сигнала "Z" происходит переход системы в следующее состояние (0001), в котором обеспечивается включение электродвигателя М1. Захват опускается. Сигнал К1 переводит схему в состояние (0011), в котором обеспечивается срабатывание захвата. Сигнал S1 переключает схему в состояние (0010). Электродвигатель М1 поднимает захват. При появлении сигнала К2 система переходит из состояния (0010) в состояние (0110), в котором электродвигатель М2 работает вперед. Рука манипулятора вместе с захватом поворачивается по часовой стрелке (если смотреть сверху). При появлении сигнала К4 система переходит в состояние (1110). В этом состоянии обеспечивается включение электродвигателя М1. Захват снова опускается. Сигнал К1 переводит схему в состояние (1010), в котором захват разжимается, о чем сигнализирует сигнал S2.
Схема переходит в состояние (1011), рука поднимается, и в момент появления сигнала датчика К2 схема переходит в состояние (1001), включается реверс двигателя поворота М2 и рука возвращается в исходное положение, о чем сигнализирует датчик К3, который переводит схему в состояние (1000). Это состояние является пустым и переход из него в исходное состояние схемы осуществляется подачей единичного сигнала "1".
Если на графе остаются незадействованные состояния, то возможно случайное попадание системы в эти состояния. Для исключения "зависания" схемы необходимо предусмотреть независимый переход из этих состояний в исходное состояние (0000). Обеспечивается это сигналами независимого перехода "1".
Дата добавления: 2021-01-26; просмотров: 660;
Поиск по сайту
Узнать еще
- F. Построение диаграмм сумм рангов
- І. Построение дисперсионного комплекса.
- А. Построение эпюр М и Q
- А. Построение эпюр М и Q
- Аксиоматическое построение теории вероятностей
- Векторное построение геометрии
- Вопрос 116. Построение информационной системы логистики.
- Вопрос 2. Построение экономико-социологической модели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
