Сходящихся сил методом проекций
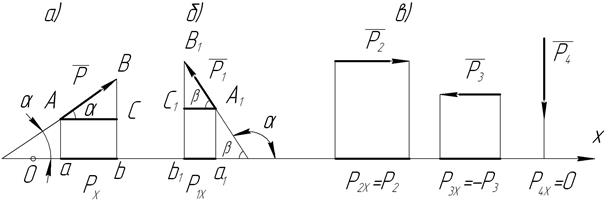
Проекцией вектора  на ось называется длина направленного отрезка оси, заключенного между двумя перпендикулярами, опущенными из начала и конца вектора . Договоримся обозначать буквой О начало отсчета значений величин по оси, а буквами х, у, z—наименования осей; положительный отсчет вести по направлению от О к х (к у или к z), а отрицательный отсчет — в противоположную сторону. Пусть заданы сила и ось Ох (рис. 6, а). Проекция силы на ось Ох выражена длиной отрезка ab, где, как видно из рисунка, а—проекция точки А начала вектора = АВ и b—проекция точки В - конца вектора - на ось. Отсчет длины проекции (от а к b) в данном случае совпадает с положительным направлением оси, значит, проекция ab положительна.
на ось называется длина направленного отрезка оси, заключенного между двумя перпендикулярами, опущенными из начала и конца вектора . Договоримся обозначать буквой О начало отсчета значений величин по оси, а буквами х, у, z—наименования осей; положительный отсчет вести по направлению от О к х (к у или к z), а отрицательный отсчет — в противоположную сторону. Пусть заданы сила и ось Ох (рис. 6, а). Проекция силы на ось Ох выражена длиной отрезка ab, где, как видно из рисунка, а—проекция точки А начала вектора = АВ и b—проекция точки В - конца вектора - на ось. Отсчет длины проекции (от а к b) в данном случае совпадает с положительным направлением оси, значит, проекция ab положительна.
Проекцию силы на ось условимся обозначать той же буквой P с добавлением индекса, обозначающего наименование оси, на которую сила проецируется, т. е. проекцию силы на ось х обозначим Px . Если обозначение силы имеет какой-нибудь индекс, то и у обозначения проекции этот индекс сохраняется; например, проекции силы  или
или  обозначаются соответственно P1x или P2x.
обозначаются соответственно P1x или P2x.
Из рис. 6, а видно, что Px = ab, но ab = AC, a из ∆ АСВ следует, что AC = Pcosa. Таким образом,
Px = Pcosα,
т. е. проекция силы на ось равна произведению модуля этой силы на косинус угла между направлением силы и положительным направлением оси.
Выражение проекции силы через ее модуль является общим для какого угодно расположения силы относительно оси. Например, сила образует (рис. 6, б) с положительным направлением оси угол α , который π/2< α <π. Следовательно,
P1x = P1 cosα = P1 cos(π - β ) = - P1 cos β.
Итак, проекция P1x отрицательна, если отсчет длины проекции от точки а1 к точке b1 противоположен положительному направлению оси. Если α = 0 (рис. 6, в), т. е. сила параллельна оси и направлена в сторону положительного отсчета оси, то cos 0 =1 и поэтому P2x = P2cos 0 = P2, если угол α = π, т. е. сила параллельна оси, но направлена противоположно положительному отсчету оси, то cos π = - 1 и P3x = P3 cos π = —P3; если угол α = π /2, т. е. сила перпендикулярна оси, то cos (π /2) = 0 и P4x = = P4cos(π /2) = 0.
|
Рис. 6. Проекции вектора силы на ось.
При решении задач, в которых фигурирует плоская система сходящихся сил, как правило, необходимо определять проекции сил на две взаимно перпендикулярные оси Ох и Оу. Все сказанное о проекциях на ось Ох справедливо и для проекций сил на ось Оу.
Так, если сила  (рис. 7) образует с положительным направлением
(рис. 7) образует с положительным направлением

осей х и у соответственно углы α x = ( , x) и α у = ( , у), то
 Pkx = Pkcоs αх и Pkу = Pkcos αy; но αy=( 90˚- α x), тогда Pkу=Pksin α x.
Pkx = Pkcоs αх и Pkу = Pkcos αy; но αy=( 90˚- α x), тогда Pkу=Pksin α x.
По заданным проекциям силы на оси может быть определен и сам вектор силы (ее модуль и направление).
Допустим, проекции Pkx и Pky силы известны, тогда из ∆ АСВ (рис. 7) видно, что модуль силы Pk =  .
.
Рассмотрим теперь определение равнодействующей системы сходящихся сил методом проекций. Допустим, что для заданной системы сходящихся сил построен многоугольник ABCDE, в котором вектор  =
=  — искомая равнодействующая данной системы (рис. 8). Выбрав систему координатных осей х и у в плоскости силового многоугольника, спроецируем его на эти оси.
— искомая равнодействующая данной системы (рис. 8). Выбрав систему координатных осей х и у в плоскости силового многоугольника, спроецируем его на эти оси.
Проекции сил на ось х:
P1x = а1b1 , P2x = b1cl , P3x = c1d1 и P4x = d1e1 .
Проекции сил на ось у:
P1y = a2b2 , P2y = b2c2 , P3y = c2d2 и P4y = d2e2 .
Для наглядности проекции на рис. 8 показаны рядом с осями, несколько смещенными относительно них, причем положительные проекции вынесены выше (проекции на ось х ) или правее (проекции на ось у ), а отрицательные соответственно ниже или левее.
Одновременно с проецированием сторон силового многоугольника, равных заданным силам, получены и проекции равнодействующей:
Из рис.8 видно, что
Р  =
=  а1е1 = — a1b1 + b1cl + cl dl — d1e1; Р
а1е1 = — a1b1 + b1cl + cl dl — d1e1; Р  = а2е2 = a2b2 + b2c2 - c2 d2 — d2e2.
= а2е2 = a2b2 + b2c2 - c2 d2 — d2e2.
Выше было показано, что система сходящихся сил уравновешена тогда, когда ее равнодействующая =0. Очевиден факт, что в этом случае равны нулю ее проекции на координатные оси х и у , т.е. условие равновесия может быть записано в виде
Р =  =0;
=0;
Р = 
 =0.
=0.
Таким образом, равнодействующая плоской системы сходящихся сил равна нулю только в том случае, когда алгебраические суммы проекций ее слагаемых на каждую из двух координатных осей равны нулю.
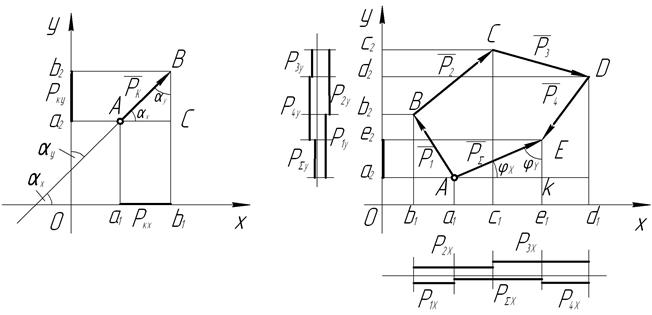
Рис. 7. Определение силы
по заданным проекциям . Рис. 8. Определение равнодействующей
системы сходящихся сил методом проекций.
Эти формулы называют уравнениями равновесия плоской системы сходящихся сил и используют при аналитическом решении задач.
Следовательно, для решения задач на равновесие плоской системы сходящихся сил мы имеем два уравнения. Эти уравнения позволяют определить две неизвестные величины. Если же задача содержит неизвестные в количестве, превышающем число уравнений равновесия, то эту задачу нельзя решить методами статики абсолютно твердого тела. Задачи подобного типа называют статически неопределимыми
Пара сил
Система двух параллельных сил, равных по модулю и направленных в противоположные стороны (рис. 9), называется парой сил (или просто парой).
Ранее показано, что две равные по модулю силы, приложенные к телу вдоль одной прямой и направленные в противоположные стороны, образуют уравновешенную систему. Две приложенные к телу равные по модулю силы, направленные в любую сторону вдоль не параллельных, но лежащих в одной плоскости линий действия, можно сложить по правилу параллелограмма и тем самым заменить одной силой — равнодействующей .
Пара сил — и не уравновешенная система и не имеет равнодействующей. Пара сил производит на тело вращательное действие.
Например, зажав карандаш между большим и указательным пальцами, мы можем его вращать, двигая пальцами в противоположные стороны, т. е. прикладывая к карандашу пару сил (рис.10).
В дальнейшем будет показано, что любую плоскую систему сил можно заменить либо одной эквивалентной ей силой (равнодействующей), либо одной эквивалентной ей парой сил. Таким образом, наравне с силой пара сил— простейший элемент статики. Условимся обозначать пару сил символом ( ,  ). Плоскость, в которой расположены силы, образующие пару сил, называется плоскостью действия пары сил.
). Плоскость, в которой расположены силы, образующие пару сил, называется плоскостью действия пары сил.
Как отмечалось выше, пара сил производит на тело вращательное действие, причем если смотреть на плоскость действия пары с какой-либо одной стороны, то пара может поворачивать тело либо против хода часовой стрелки (см. рис. 9 и 10), либо по ходу часовой стрелки. Количественная мера
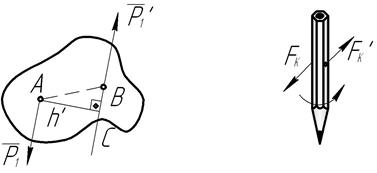
Рис.10. Пример действия пары сил на тело.
Рис. 9. Пара сил.
воздействия пары сил на тело зависит от модуля P сил пары и кратчайшего расстояния h (см. рис. 9) между линиями их действия, называемого плечом пары. Чем больше модули P сил пары и чем больше длина плеча h, тем больший вращательный эффект производит пара на тело.
Вращательный эффект пары измеряется взятым со знаком плюс или минус произведением модуля одной из сил пары на ее плечо. Эта алгебраическая величина называется моментом пары и обозначается M, т. е.
M= ± P h.
Знак плюс ставится перед числовым значением момента в том случае, если пара стремится повернуть тело против хода часовой стрелки, и знак минус, если пара стремится повернуть тело по ходу часовой стрелки. Например, на рис. 11, а на тело действует пара ( ,  ) с моментом M1= P1 h1, а на рис. 11, б пара(
) с моментом M1= P1 h1, а на рис. 11, б пара(  ,
,  ) с моментом M2= - P2 h2. В Международной системе единиц (СИ) силу измеряют в ньютонах, а плечо в метрах. Соответственно момент пары измеряется в ньютонометрах (Н.м).
) с моментом M2= - P2 h2. В Международной системе единиц (СИ) силу измеряют в ньютонах, а плечо в метрах. Соответственно момент пары измеряется в ньютонометрах (Н.м).

Рис. 11. Определение знака момента пары сил.
Дата добавления: 2016-10-26; просмотров: 2585;
Поиск по сайту
Узнать еще
- Cравнительная характеристика усилителей на БТ
- I. Расчёт методом контурных токов.
- I. Реакции фенольного гидроксила
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.4.1 МОМЕНТ СИЛЫ И МОМЕНТ ИНЕРЦИИ
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. Расчёт методом суперпозиции.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
