Точность определения места
Точность определения места судна по РНС «Лоран-С» зависит от погрешностей измерения навигационного параметра и угла пересечения линий положения (θ).
Точность измерения навигационного параметра определяется погрешностью синхронизации ведомых (ВМ) станций (± 0,3 мкс); инструментальной погрешностью ПИ (± 0,5 мкс); погрешностью отсчета интервала времени по шкале (± 0,1 мкс); погрешностью за условия распространения радиоволн (до ± 3 мкс).
Установлено, что при приеме сигналов на поверхностных волнах с фиксацией фазы в приемоиндикаторе суммарная СКП измерения навигационного параметра (НП) – mΔt = ± 0,4 ÷ ± 0,5 мкс (D ≤ 1000 миль); а при приеме на пространственных волнах – ± 2 ÷ ± 3 мкс (D = 1500 ÷ 1800 миль), то есть, – СКП измерения интервала времени импульсно-фазовым методом:
- на поверхностных волнах mΔD = 120 ÷ 150 м;
- на пространственных волнах mΔD = 600 ÷ 900 м.
Практика показывает, что погрешности определения места судна с помощью РНС «Лоран-С» с Р = 0,95 (95%) составляют:
- 0,2÷0,3 мили днем на поверхностных волнах, и
- 0,5÷1,0 мили ночью на предельных расстояниях.
Расчет значения радиальной (круговой) СКП обсервованного места производится по формуле:
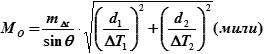
| (22.19) |
| где | mΔt – СКП измерения радионавигационного параметра (мкс); |
| ΔT1,2 – разность оцифровки двух соседних гипербол на РНК, между которыми находится обсервованное место судна (мкс); | |
| d1,2 – кратчайшее расстояние между этими гиперболами (мили); | |
| θ – угол между линиями положения (≤ 90°) в точке их пересечения. |
Пример:
Место определено по РНС «Лоран-С» и φ0, λ0 вычислены с помощью РНК:
- расстояние с РНК между оцифрованными гиперболами d1 = d2 = 5 миль;
- разность в оцифровке смежных гипербол ΔT1 = ΔT2 = 10 мкс, θ = 30°, mΔt = ±0,3 мкс.
Решение:
По формуле (22.19) → 
Дата добавления: 2021-01-26; просмотров: 639;
Поиск по сайту
Узнать еще
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- U-Pb метод определения возраста по циркону
- VIII Места занятий, оборудование и спортивный инвентарь
- А) в средних рядах; б-д) в крайних рядах; е) в торцах; ж-и) в местах перепада высот, деформационных и температурных швов (на парных колоннах)
- А) Общие определения
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
