Способы определения мгновенных поправок гирокомпаса
I. Астрономический(*):
- по пеленгу небесного светила (звезда, планета, Солнце, Луна), при их высотах не > 15° и находящихся вблизи I вертикала;
- по пеленгу Солнца, измеренного в момент его видимого восхода или захода;
- по пеленгу звезды Полярная (
 α Малой Медведицы).
α Малой Медведицы).
(*) Сущность и методика определения ΔГК′ по пеленгам небесных светил рассматриваются при изучении дисциплины «Мореходная астрономия».
II. По взаимным пеленгам с теодолитным постом:
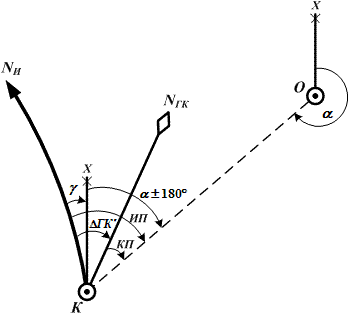
Рис. 4.5. Определение поправки гирокомпаса по взаимным пеленгам с теодолитным постом
Теодолит (рис. 4.5) выставляется в точке (т. О) видимой с судна (т. К).
Теодолит и пеленгаторный репитер примерно на одном уровне.
Теодолит сориентирован относительно километровой линии X = const проекции Гаусса по известному дирекционному углу на вспомогательный ориентир.
Над центром теодолита и пеленгаторного репитера установлены световые ориентиры (электрические лампы).
Теодолитный пост имеет связь с судном. Взаимные измерения направлений производятся одновременно по сигналу с судна.
| ΔГК′ = (α ± 180°) + γ − КП | (4.9) |
Схождение меридианов для т. К
| γ = (λ − L0) · sin φ | (4.10) |
Долгота осевого меридиана зоны
| L0 = 6n − 3 | (4.11) |
Номер зоны, в которой расположена заданная точка

| (4.12) |
φ, λ → географические координаты места судна
III. По пеленгам отдаленного ориентира:
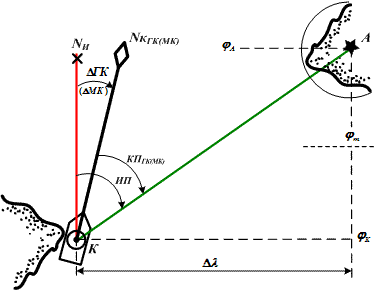
Рис. 4.6. Определение поправки гирокомпаса по пеленгам отдаленного ориентира
Положение ориентира А известно (есть на карте) и он виден с судна (рис. 4.6).
Место судна (т. К) известно (φ, λ места у стенки, причала, бочки).
Истинный пеленг ориентира измеряют по карте с помощью штурманского транспортира и параллельной линейки.
При использовании карты в нормальной проекции Меркатора – ИП = Р − ψ,
| где | Р(Лок. П) – измеренный локсодромический пеленг; |
| ψ – ортодромическая поправка |
| (4.13) |
| где | Δλ – разность долгот двух точек (судна и ориентира); |
| φm – средняя для точек широта. |
При использовании топографической карты в проекции Гаусса
| ИП = α − γ | (4.14) |
| где | α – дирекционный угол; |
| γ – схождение меридианов. |
IV. По пеленгу створа:
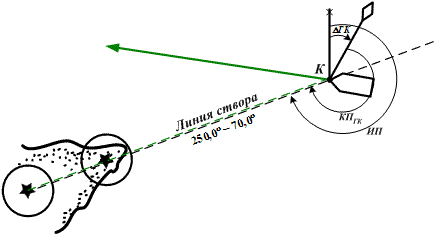
Рис. 4.7. Определение поправки гирокомпаса по пеленгу створа
Компасный пеленг створа (рис. 4.7) измеряется в момент его пересечения (т. К).
Значение ИП (направление линии створа) указано на карте (250.0°).
V. По сличению с другим курсоуказателем (рис. 4.8):
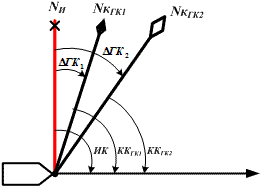
Рис. 4.8. Определение поправки гирокомпаса по сличению с другим курсоуказателем
Поправка первого ГК – ΔГК1 известна.
По команде одновременно снимаются значения курсов первого (ККГК-1) и второго (ККГК-2) гирокомпасов.
Рассчитывается значение «сличения» –
| СЛ = ККГК-2 − ККГК-1 | (4.15) |
Рассчитывается мгновенная поправка (ΔГК′2) другого гирокомпаса:
| ΔГК′2 = ΔГК′1 − СЛ | (4.16) |
Поправка гироазимута ΔГА на момент наблюдений определяется так же, как мгновенная поправка ГК по формуле:
| ΔГА0 = ИП − КПГА | (4.17) |
| где | КПГА – компасный (приборный) пеленг, измеренный с помощью пеленгатора на пеленгаторном репитере, курс на который транслируется от гироазимута. |
Поправка гироазимута на заданный момент времени (ΔГАЗ) вычисляется по исходной поправке ГА и остаточной скорости ухода ГА − (  ).
).
| ΔГАЗ = ΔГА0 + · (TЗ − T0)
| (4.18) |
Остаточная скорость ухода ГА находится:
- по поправкам, определенным на моменты Т1 и Т2 (формула 4.19);
- с помощью графика разностей курсов по ГК и ГА.
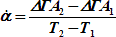
| (4.19) |
Для определения величины с помощью графика разностей курсов следует:
1. – в течение 3 часов через каждые 10-15 мин. замечать ККГК и ККГА;
2. – рассчитать разности курсов
| Pi = ККГКi − ККГАi; | (4.20) |
3. – построить график зависимости Р от времени t (рис. 4.9);
4. – провести плавную кривую разностей курсов;
5. – провести осредняющую прямую (АВ), которая характеризует уход ГА;
6. – снять с графика две ординаты R1 на Т′1 и R2 на Т′2;
7. – вычислить остаточную скорость ухода ГА по формуле:

| (4.21) |
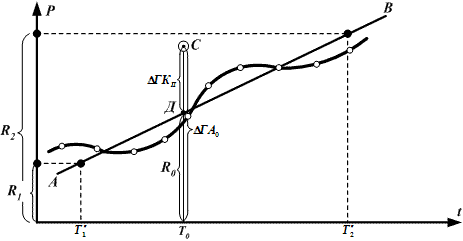
Рис. 4.9. Определение поправки курсоуказателей с помощью графика разностей курсов
Если при ведении графика в момент Т0 определялась ΔГА0, то постоянная поправка гирокомпаса.
| ΔГКП = ΔГА0 − R0 | (4.22) |
Точность этой ΔГКП зависит от:
- продолжительности ведения графика разностей курсов;
- точности проведения осредняющей прямой АВ;
- точности определения поправки ΔГА0.
4.3.3. Задачи по расчету поправки гироазимута (ΔГА3) на заданное время
| №№ зад. | Дано | Ответ | ||
| ΔГА0 | α (°/час) | Тзад – Т0 (час) | ΔГА3 | |
| +1,5° | –0,2 | 4,0 | +0,7° | |
| – 0,8° | +0,2 | 6,0 | +0,4° | |
| +0,6° | –0,3 | 5,0 | –0,9° | |
| –1,2° | +0,3 | 3,0 | –0,3° | |
| +0,8° | –0,4 | 7,0 | –2,0° | |
| –1,6° | +0,4 | 8,0 | +1,6° | |
| +1,2° | –0,1 | 9,0 | +0,3° | |
| –2,4° | +0,1 | 10,0 | –1,4° | |
| +1,0° | –0,05 | 8,0 | +0,6° | |
| –1,0° | +0,05 | 12,0 | –0,4° |
Выводы
1. Основной курсоуказатель на судне – гироскопический (гирокомпас). Магнитный компас – резервный курсоуказатель.
2. При использовании приборов курсоуказания для определения истинных направлений (курса, пеленга), компасные направления должны исправляться поправками курсоуказателей.
3. Поправки курсоуказателей должны определяться в сроки, регламентируемые руководящими документами и способами, дающими большую точность в конкретной обстановке.
4. На морской навигационной карте прокладываются (проводятся) только исправленные (истинные) направления.
Примечание: Самоконтроль знаний по теме проводится по тестовым заданиям к главе на базе приложения «Компьютерная система тестирования знаний «OPENTEST».
Дата добавления: 2021-01-26; просмотров: 1106;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- U-Pb метод определения возраста по циркону
- А) Общие определения
- А) Способы изображения пространственного строения энантиомеров
- Административно - правовой и гражданско-правовой способы
- Алгебраический метод определения симметричных колебаний
- Алгебраический способ определения симметричных автоколебаний и устойчивости

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
