Тема 12.3. Нижний уровень АСУТП.
(Программируемые контроллеры).
Контроллеры при помощи УСО опрашивают датчики
(Д1 – Дn), масштабируют их показанию и передают их при помощи модуля связи по вычислительной сети на верхний уровень АСУТП (рис.6).
Кроме опроса датчиков контроллеры выполняют функции автоматического управления технологическими объектами ТО. Управление объектом осуществляется выдачей управляющих сигналов на исполнительные устройства (ИУ1 – ИУm).
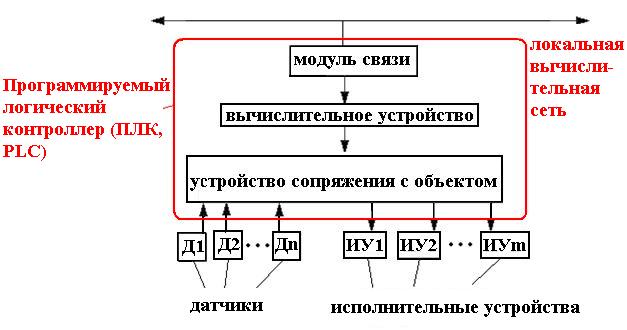
Рис.6. Связи контроллера с верхним уровнем АСУТП и объектом.
Монитор контроллера.
Вид на контроллер сзади.
Структура ПЛК.
Программируемые контроллеры (PLC — ProgrammableLogicalController) — это выпускаемые серийно управляющие устройства, предназначенные для управления технологическим циклом работы производственного оборудования.
Типичная структура ПЛК представлена на рис.7. Конструктивно ПЛК обычно оформлен в виде двух или трех блоков. Обязательными являются модуль питания, микропроцессорный модуль МПМи блок программатора.
| Блок ПЛК |
| Интерфейс связи с УВМ |
| МПМ |
| программатор |
| Дискретные МВВ |
| Аналоговые МВВ |
| Специализированные МВВ |
| Системная магистраль |
| Рис. 7. Структура программируемого логического контроллера. |
Программатор — это программирующее устройство, с помощью которого управляющая программа вводится в блок ПЛК. Одновременно предусматривается применение переносного клавишного программатора, который используют преимущественно для наладки системы управления, построенной на базе ПЛК. После ввода и отладки УП контроллер реализует заданные управляющие функции, работая в автономном автоматическом режиме.
МПМ - микропроцессорное устройство, осуществляет переработку поступающей информации и формирует управляющие сигналы. В нем же находится устройство памяти ПЛК в составе ПЗУ и ОЗУ. В ПЛК нет многозадачной операционной системы типа Windows.Все технологические программы,заложенные в ПЛК, выполняются в цикле.
МВВ - модули ввода-вывода служат для ввода информации, поступающей от объекта ТО, и вывода сигналов управления на объект. Различают следующие основные типы МВВ:
- ПДТС - приёмники дискретных телесигналов, служат для ввода дискретной информации от ТО. ПДТС характеризует состояние сигналов от объекта типа включено-отключено.
- ПРТУ – передатчики дискретных телесигналов, служат для вывода дискретных управляющих сигналов на ТО. ПРТУ выдают при помощи реле управляющие сигналы включить-отключить.
- АЦП - аналого-цифровые преобразователи, служат для ввода аналоговых параметров. На входе ток или напряжение, на выходе цифровой код.
- ЦАП - цифроаналоговые преобразователи, служат для вывода управляющих аналоговых сигналов. На входе цифровой код, на выходе аналоговый сигнал. Часто управляющие сигналы от модуля ЦАП выдаются на ТО через магнитные усилители.
При необходимости в блоке ПЛК устанавливаются различные специализированные МВВ, среди которых — модули для приема импульсных сигналов датчиков перемещений и модули, предназначенные для управления следящими электроприводами.
ПЛК обычно устанавливаются непосредственно на объекте или вблизи от него, например, на гидроагрегате. ПЛКсчитывает с датчиков гидроагрегата информацию, используя блоки АЦП и ПДТС, и направляют её в ЦУВМ. ЦУВМ может выдать на ПЛК решение. ПЛКвыдаёт на ТОуправляющие сигналы, используя блоки ЦАП и ПРТУ.
В локальных АСУТП, с ограниченным числом функций, ПЛКможет самостоятельно принимать решение. Например, регулирование скорости вращения гидротурбины.
12.3.2. Модули ввода-вывода (рис.8).
Нижний уровень АСУТП составляют измерительные приборы и исполнительные механизмы. Приборы могут быть аналоговыми или цифровыми (интеллектуальными).
Для обмена информацией с приборами необходимо использовать аналого-цифровые преобразователи (АЦП).
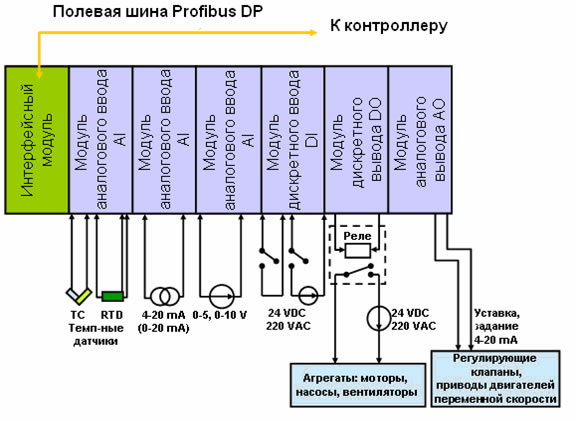
Рис. 8. Модули ввода-вывода ПЛК.
Блок питания (БП) сделан отдельным модулем, а не устройством, чтобы гарантировать совместимость с данной линейкой ПЛК. Чаще всего входное напряжение у БП 220 В переменного тока, выходное — 24 В постоянного тока.
Процессорный модуль — это голова ПЛК. Внутри у него, само собой, ЦПУ, ОЗУ и ПЗУ, сервисный порт для прошивки и, возможно, коммуникационный порт (ethernet, RS232/422/485, Profibus, etc).
Дискретные (ПДТС) и аналоговые (АЦП) модули обрабатывают соответствующие сигналы от датчиков.
Дискретный сигнал — это обычно напряжение цепи 24 вольта. Если U=24 В, то это «1»-наличие сигнала, если U=0, то «0»-отсутствие сигнала. Бывают модули на 220В.
Дискретные сигналы, приходящие от датчиков, могут информировать, например, о состоянии насоса включен/выключен.
Управляющие дискретные сигналы могут запускать насос, если U=24 В, либо останавливать этот насос, если U=0 В.
Аналоговые входные сигналы — это показания датчиков (измерительных преобразователей). Здесь чаще всего используется токовая петля 4-20 мА, в соответствие с которой ставятся пределы измерения датчика. Начинается от 4 мА для диагностирования обрыва цепи (если меньше 4 мА, значит где-то что-то не в порядке с проводкой).
Рассмотрим на примере уровня жидкости в резервуаре. Стоит уровнемер, он измеряет уровень от 0 до 2 метров. Тогда: уровень 0 метров — это 4 мА, уровень 2 метра — это 20 мА. Промежуточные значения калибруются по ситуации, может быть небольшая погрешность, уровень в 1 метр может быть какие-нибудь 12,7553мА.
12.3.3. Типы ПЛК.
Основным показателем ПЛК является количество каналов ввода-вывода.
По этому признаку ПЛК делятся на следующие группы:
•нано-ПЛК (менее 16 каналов);
•микро-ПЛК (более 16, до 100 каналов);
•средние (более 100, до 500 каналов);
•большие (более 500 каналов).
По расположению модулей ввода-вывода ПЛК бывают:
• моноблочными - в которых устройство ввода-вывода (МВВ) не может быть удалено из контроллера.
• модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Типовое количество слотов для сменных модулей - от 8 до 32;
• распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода (МВВ) выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
По конструктивному исполнению и способу крепления контроллеры делятся на:
•панельные (для монтажа на панель или дверцу шкафа);
•для монтажа на DIN-рейку внутри шкафа;
•для крепления на стене;
•стоечные - для монтажа в стойке;
•бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "OriginalEquipmentManufacturer").
По области применения контроллеры делятся на следующие типы:
•универсальные общепромышленные;
•для управления роботами;
•для управления позиционированием и перемещением;
•коммуникационные;
•ПИД-контроллеры;
•специализированные.
По способу программирования контроллеры бывают:
•программируемые с лицевой панели контроллера;
•программируемые переносным программатором;
•программируемые с помощью персонального компьютера.
Дата добавления: 2021-01-26; просмотров: 581;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- I. Математические понятия
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- II. Формализация процесса формирования математических моделей
- Mатематическое определение ОС.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
