Определите назначение путевого управления.
Управление вертолетом, т. е. изменение его балансировочного положения относительно трех пространственных осей, производится путем изменения значения и направления силы тяги несущего винта, значения силы тяги рулевого винта.
Управление силами тяги несущего и рулевого винтов осуществляется с помощью системы управления вертолетом, кинематическая схема которого приведена на рис._8.1.
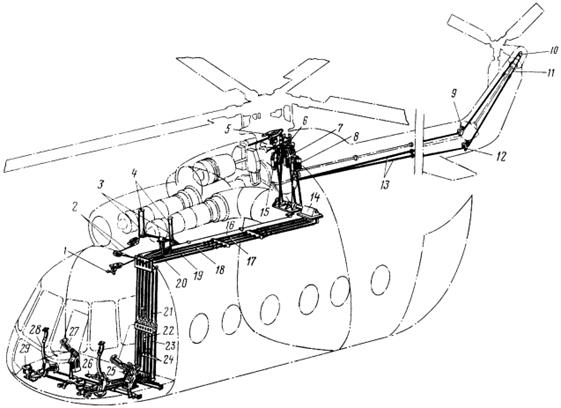
Рис. 8.1. Кинематическая схема управления вертолетом:
1 - рычаги останова двигателей; 2, 16 - тросы; 3, 4, 17, 18, 19, 20 - тяги; 5- рычаг общего шага автомата перекоса; 6, 7, 8, 15-гидроусилители; 9 - направляющие ролики; 10 - звездочка механизма изменения шага рулевого винта; 11- втулочно-роликовая цепь; 12 - кронштейн; 13 - тросовая проводка управления рулевым винтом; 14 - агрегат управления; 21, 22, 23 - пружинные механизмы загрузки; 24 - электромагнитные тормоза ЭМТ-2М; 25- рычаги раздельного управления двигателями; 26 - ручка управления тормозом несущего винта; 27 - ручка ШАГ-ГАЗ; 28 - ручка продольно-поперечного управления; 29 - педали
Система управления включает отдельные самостоятельные цепи продольного, поперечного, путевого управлений и вертикального перемещения. Цепи продольного и поперечного управлений связаны с ручкой управления циклическим шагом несущего винта и автоматом перекоса, цепь путевого управления - с педалями и механизмом изменения шага рулевого винта, цепь вертикального перемещения с ручкой ШАГ-ГАЗ - с двигателями и автоматом перекоса.
Продольное управление достигается отклонением ручки циклического шага вперед или назад. Такие отклонения приводят к изменению положения тарелки автомата перекоса, изменению циклического шага и завалу оси конуса несущего винта в сторону отклонения ручки. В результате завала оси конуса отклоняется вектор силы тяги несущего винта, и продольная составляющая увеличивается или уменьшается, изменяя скорость полета. Кроме того, завал оси конуса несущего винта приводит к возникновению продольного момента, под действием которого вертолет поворачивается вокруг поперечной оси, изменяя угол тангажа.
Поперечное управление требует отклонения ручки циклического шага вправо или влево. При таком отклонении ось конуса несущего винта заваливается в ту сторону, куда отклоняется ручка, в результате чего изменяется величина поперечной составляющей, что и вызывает перемещение вертолета вправо или влево. Одновременно образуется поперечный момент управления, который поворачивает вертолет вокруг продольной оси, изменяя угол крена. Путевое управление осуществляется отклонением педалей. В результате этого отклонения изменяется шаг, а следовательно, и сила тяги рулевого винта. Это, в свою очередь, вызывает изменение момента относительно вертикальной оси вертолета и изменение угла рыскания (азимутального положения вертолета). Момент тяги рулевого винта уравновешивает реактивный момент несущего винта. Изменение момента тяги приводит к развороту вертолета в ту сторону, куда отклоняется педаль.
Для вертикального перемещения вертолета необходимо изменить вертикальную составляющую, что достигается изменением общего шага несущего винта. Изменение тяги несущего винта по величине достигается при помощи ручки объединенного управления ШАГ-ГАЗ путем одновременного изменения общего шага несущего винта и режима работы двигателей. Наряду с объединенным управлением двигателями с помощью ручки ШАГ-ГАЗ на вертолете имеются рычаги раздельного управления двигателями. Рычаги позволяют производить раздельное опробование двигателей без изменения общего шага несущего винта, а также обеспечивают возможность подбора оптимального режима работы в случае вынужденного полета на одном работающем двигателе.
В систему управления вертолетом входят:
- двойное продольно-поперечное управление, в котором две ручки кинематически связаны между собой и с автоматом перекоса;
- двойное путевое управление, где педали кинематически связаны между собой и с механизмом изменения шага рулевого винта;
- двойное объединенное управление, в котором две ручки ШАГ-ГАЗ кинематически связаны между собой, а так же с автоматом перекоса и рычагами топливных насосов-регуляторов HP 40ВГ на двигателях;
- раздельное управление двигателями, рычаги которого связаны с рычагами топливных насосов-регуляторов HP-40ВГ;
- управление остановом двигателей, в котором ручки кинематически связаны с рычагами топливных насосов-регуляторов НР-40ВГ;
- управление тормозом несущего винта, в котором рычаг кинематически связан с механизмом тормоза.
Дата добавления: 2016-10-07; просмотров: 2553;
Поиск по сайту
Узнать еще
- Cвойства определителей
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- IV. Термодатчики, их устройство и назначение.
- А) Назначение и порядок выполнения расчетов
- Агрегат управления.
- АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
- Аналого-цифровые преобразователи: назначение, ошибки преобразования, способы уменьшения динамических ошибок преобразования. Виды АЦП, сравнительная оценка.
- Архивация файлов, назначение, виды и основные возможности архиваторов.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
